半导体晶圆支撑装置、加工系统及半导体晶圆转移方法
文献发布时间:2023-06-19 13:26:15
技术领域
本公开实施例涉及一种半导体晶圆支撑装置、半导体晶圆加工系统及半导体晶圆转移方法,尤其涉及一种包括具有应力降低特征的升降销的半导体晶圆支撑装置、半导体晶圆加工系统及半导体晶圆转移方法。
背景技术
为了在半导体晶圆上制造装置,执行许多单元操作(例如遮蔽、蚀刻、沉积、注入等)。半导体晶圆可以在装置制造期间在单元操作之间进行输送。为了将半导体晶圆输送到每个单元操作以及从每个单元操作输送半导体晶圆,可以使用例如前开式传送盒(FrontOpening Unified Pod;FOUP)等储存容器。可以使用机械手臂将半导体晶圆装载到前开式传送盒中以及从前开式传送盒中卸载半导体晶圆。可以将附接至铰接式机械手臂的转移刀片放置在晶圆下方,且用以将晶圆抬升至前开式传送盒中以及从前开式传送盒中抬出晶圆。当将半导体晶圆运送到单元操作时,铰接式机械手臂可以将半导体晶圆抬离前开式传送盒,且将半导体晶圆运送到卡盘以进行单元操作。在完成单元操作之后,机械手臂将半导体晶圆装载回前开式传送盒中,以输送到下一个单元操作。
发明内容
本公开实施例提供一种半导体晶圆支撑装置,包括:配置以与半导体晶圆的背面接触的升降销。升降销的其中至少一个包括配置以支撑半导体晶圆的支撑柱。支撑柱包括第一端和第二端。升降销亦包括应力降低元件,连接到支撑柱的第一端或第二端中的任一个以降低升降销和半导体晶圆之间的接触应力。应力降低元件包括弹性段部。
本公开实施例提供一种半导体晶圆加工系统,包括:具有第一端和第二端的铰接式机械手臂、位于铰接式机械手臂的第一端的转移刀片和半导体加工单元操作。半导体加工单元操作包括半导体晶圆支撑装置。半导体晶圆支撑装置包括配置以与半导体晶圆的背面接触的升降销。升降销中的至少一个包括配置以支撑半导体晶圆的支撑柱。支撑柱包括第一端和第二端。升降销亦包括应力降低元件,连接到支撑柱的第一端或第二端中的任一个以降低在升降销和半导体晶圆之间的接触应力。应力降低元件包括至少一应力降低特征。
本公开实施例提供一种半导体晶圆转移方法,包括:以第一半导体晶圆支撑装置抬升半导体晶圆。第一半导体晶圆支撑装置包括配置以与半导体晶圆的背面接触的升降销。升降销中的至少一个包括配置以支撑半导体晶圆的支撑柱。支撑柱包括第一端和第二端。升降销亦包括应力降低元件,连接至支撑柱的第一端或第二端中的任一个,以降低升降销与半导体晶圆之间的接触应力。应力降低元件可以包括弹性段部。在半导体晶圆下方操纵转移刀片。降低第一半导体晶圆支撑装置的升降销,使得半导体晶圆由转移刀片支撑。用转移刀片将半导体晶圆从第一位置转移到第二位置。
附图说明
根据以下的详细说明并配合所附附图以更好地了解本公开实施例的概念。应注意的是,根据本领域的标准惯例,附图中的各种特征未必按照比例绘制。事实上,可能任意地放大或缩小各种特征的尺寸,以做清楚的说明。在通篇说明书及附图中以相似的标号标示相似的特征。
图1示出根据一些实施例的具有晶圆支撑升降销延伸且支撑半导体晶圆的静电卡盘的立体图。
图2示出根据一些实施例的具有包括弹簧的晶圆支撑升降销的静电卡盘的垂直剖视图。
图3示出根据一些实施例的图2的晶圆支撑升降销的近视图。
图4A示出根据一些实施例的另一晶圆支撑升降销的侧视图。
图4B示出根据一些实施例的图4A所示的晶圆支撑升降销的剖面的垂直剖视图。
图5A至图5C示出根据一些实施例的另一晶圆支撑升降销的侧视图。
图6A示出根据一些实施例的半导体晶圆转移系统的平面图。
图6B示出根据一些实施例的沿着线AA'的图6A的晶圆转移系统的剖面的垂直剖视图。
图7示出根据一些实施例的具有半导体晶圆转移系统的束型设备的剖面的水平剖视图。
图8示出根据一些实施例的转移半导体晶圆的方法的流程图。
附图标记说明如下:
100:半导体晶圆支撑装置
102:基座
104:顶面
106:开孔
107:支撑柱
107A:第一端
107B:第二端
108:升降销
109:背面
110:半导体晶圆
112:弹簧
114:弹性盖体
116a,116b,116c:尖端
200:半导体晶圆加工系统
201:外壳
202:晶圆转移设备
203:第一端
204:铰接式机械手臂
205:第二端
208:转移刀片
209-1:第一前开式传送盒(前开式传送盒)
209-2:第二前开式传送盒(前开式传送盒)
210:半导体加工单元操作
220:束型设备
222:入口
224:出口
300:方法
302,304,306,308:步骤6
AA’:线
Φ:球面角
具体实施方式
应了解的是,以下的公开内容提供许多不同的实施例或范例以实施本公开实施例的不同特征。以下叙述构件及配置的特定范例,以简化本公开实施例的说明。当然,这些特定的范例仅为示范并非用以限定本公开实施例。举例而言,在以下的叙述中提及第一特征形成于第二特征上或上方,即表示其可包括第一特征与第二特征是直接接触的实施例,亦可包括有附加特征形成于第一特征与第二特征之间,而使第一特征与第二特征可能未直接接触的实施例。另外,本公开可在各个范例中重复标号及/或字母。此重复是出于简单和清楚的目的,且其本身并不表示所述的各种实施例及/或配置之间的关系。
此外,在此可使用与空间相关用词。例如“底下”、“下方”、“较低的”、“上方”、“较高的”及类似的用词,以便于描述附图中示出的一个元件或特征与另一个(些)元件或特征之间的关系。除了在附图中示出的方位外,这些空间相关用词意欲包括使用中或操作中的装置的不同方位。装置可能被转向不同方位(旋转90度或其他方位),且在此使用的空间相关词也可依此做同样的解释。
一般而言,本公开的结构和方法可以用于转移半导体晶圆且在半导体晶圆上执行单元操作,同时降低在从静电卡盘(electrostatic chuck;ESC)装载和卸载晶圆期间由后侧升降销所造成对半导体晶圆的损坏。
如上所述,可以对半导体晶圆进行许多单元操作(例如遮蔽、蚀刻、沉积、注入等),以便在半导体晶圆上制造装置。可以在制造装置期间在单元操作之间转移半导体晶圆。为了将半导体晶圆输送到每个单元操作以及从每个单元操作输送半导体晶圆,可以使用例如前开式统一(或通用)容器(前开式传送盒)的储存容器。可替代地,束型设备可以允许机械手臂将半导体晶圆转移到束型设备的不同腔室中。束型设备的每个腔室可以执行不同的单元操作。可以使用机械手臂将半导体晶圆装载到前开式传送盒中以及从前开式传送盒中取出,或者将半导体晶圆装载到束型设备的不同腔室中以及从不同腔室中取出。附接到铰接式机械手臂的转移刀片可定位于晶圆下方,且用于抬升半导体晶圆。当将半导体晶圆运送到单元操作时,铰接式机械手臂可以将半导体晶圆运送到静电卡盘以进行单元操作。在将半导体晶圆运送到静电卡盘时,将半导体晶圆下降至静电卡盘的升降销。升降销可以缩回,进而将晶圆下降到静电卡盘的表面上。在完成单元操作之后,可以升起升降销以将半导体晶圆从静电卡盘的表面抬升,进而允许铰接式机械手臂将半导体晶圆装载回前开式传送盒中以输送到下一个单元操作。
每次将半导体晶圆下降到升降销上以及每次升降销将半导体晶圆抬升离开静电卡盘时,半导体晶圆可能会因升降销施加在晶圆上的力而损坏。对半导体晶圆的损坏可能影响到沉积在半导体晶圆正面上的后续层中。后续的外延层可能比非外延层对晶圆损坏更敏感。举例而言,由于在升降销撞击半导体晶圆时发生的基底晶格错位,可能会形成外延层缺陷。氧可能会被析出,且可能会形成氧化硅缺陷。
此外,使半导体晶圆承受高温(例如在沉积和离子注入单元操作中所使用的高温)可能会降低晶圆的硬度。如此一来,因由静电卡盘升降销所反复执行的抬升和下降,被加热的半导体晶圆可能更容易受到机械损坏。
在一些实施例中,静电卡盘设置有升降销,此升降销包括与升降销的底端接触的弹簧。当通过此实施例的升降销将半导体晶圆装载到静电卡盘上及/或从静电卡盘上抬升时,升降销中所包括的弹簧可以压缩且吸收一些本应施加到半导体晶圆上的应力。在另一些实施例中,升降销的尖端可以设置有弹性盖体。相似于具有弹簧的实施例的升降销,弹性盖体可以压缩且吸收一些本应施加到半导体晶圆上的应力。在另一些实施例中,升降销可以设置有比传统升降销更圆的尖端。亦即,并非将升降销的尖端终止于单一点,而是使升降销的尖端包括扁平或扁椭球形。在此方式中,此实施例的升降销可以提供与半导体晶圆的背面的更大的接触表面积。此较大的接触表面积可以通过此实施例的升降销分配施加在半导体晶圆上的力,进而降低给定接触力的接触应力。
图1示出半导体晶圆支撑装置100的立体图,此半导体晶圆支撑装置100包括一个或以上应力降低特征的静电卡盘,以下将更详细地说明。应力降低特征被配置以降低由升降销108施加到半导体晶圆110上的接触应力。半导体晶圆支撑装置100包括基座102,基座102在其顶面104中包括多个开孔106。升降销108可以通过基座102的顶面104中的开孔106被延伸或者缩回。升降销108可以具有被配置以接触半导体晶圆110的背面109的端部。如以下参照图2至图5C的详细说明,升降销108可包括支撑柱107,支撑柱107具有第一端107A和第二端107B。升降销108亦可包括应力降低元件。在一些实施例中,应力降低元件可以位于支撑柱107的第一端107A。然而,在其他实施例中,应力降低元件亦可以位于支撑柱107的第二端107B。如以下参照图2至图5C的详细说明,应力降低元件可以是弹性段部或者可以与支撑柱107一体成型。
在操作中,升降销108可以在接收半导体晶圆110时延伸。升降销108可以随后缩回,以便将半导体晶圆110降低到半导体晶圆支撑装置100的基底102的顶面104。一旦半导体晶圆110接合半导体晶圆支撑装置100的基底102的顶面104,即可执行装置工艺的单元操作。在执行单元操作之后,可通过升降销108将半导体晶圆110抬升,以远离半导体晶圆支撑装置100的基座102的顶面104,进而使得转移刀片(未图示,以下将详细说明)可以插入以接触半导体晶圆110的背面109。一旦转移刀片与半导体晶圆110的背面109接合,则可以将半导体晶圆110移至束型设备的下一个腔室或移至储存盒,例如前开式传送盒。单元操作可以包括但不限于遮蔽、沉积、蚀刻、化学机械抛光、离子注入或清洁。
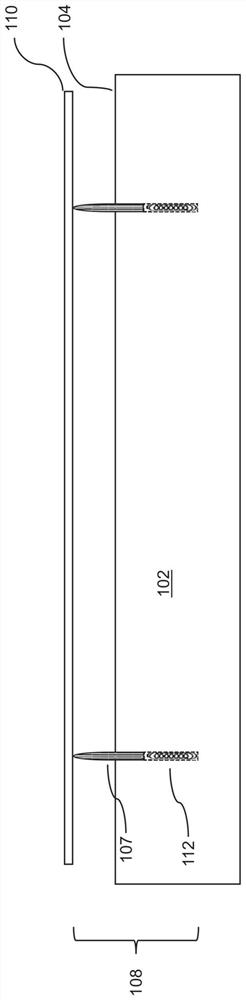
图2和图3示出具有应力降低特征的实施例的升降销108。如图2和图3所示,在将升降销108插入开孔106中之前,可将例如弹簧112的弹性元件设置在半导体晶圆支撑装置100的基座102的开孔106内。如上所述,升降销108可包括支撑柱107和应力降低元件(例如弹簧112)。支撑柱107可被配置以支撑半导体晶圆110。应力降低元件(在此实施例中为弹簧112)连接到支撑柱107的第一端107A,以降低升降销108与半导体晶圆110之间的接触应力。在一替代实施例中,弹簧112可以与升降销108一体成型。在另一替代实施例中,弹簧112的尺寸可以插入形成在支撑柱107的第一端107A中的凹腔(未图示)中。在又一替代实施例中,弹簧112可以与开孔106的底面一体成型,且配置以接触升降销108的支撑柱107的第一端107A。
可以将半导体晶圆110放置在升降销108上(或者可以使用升降销108将半导体晶圆110抬离半导体晶圆支撑装置100的基座102的顶面104)。在图2和图3所示实施例的升降销108中,弹簧112可因半导体晶圆110的重量而压缩,藉此吸收一些接触应力。在一些实施例中,弹簧112具有介于7×10
F=-kx
其中k是弹性常数,x是弹簧位移量。
在将半导体晶圆110放下在升降销108上或通过升起升降销108使半导体晶圆110从静电卡盘抬升的两种情况下,弹簧112可以作为缓冲器以吸收接触应力且减轻对半导体晶圆110的损坏。举例而言,超过5.1兆帕(gigapascal;GPa)的机械接触力可能会造成半导体晶圆110损坏。通过提供弹簧112,可吸收接触应力且可减轻对半导体晶圆110的损坏。
图4A是另一实施例的升降销108的侧视图,而图4B是图4A所示实施例的升降销108的剖视图。图4A和图4B中所示实施例的升降销108可包括另一应力降低元件。此实施例中的应力降低元件包括弹性段部,例如弹性盖体114。在这些实施例中,弹性盖体114可以设置在升降销108的支撑柱107的第二端107B上方。半导体晶圆110可以被放置在升降销108的弹性盖体114上(或者使用升降销108以将半导体晶圆110从半导体晶圆支撑装置100的顶面104上抬升)。在图4A至图5C所示的实施例中,由于半导体晶圆110的重量,弹性盖体114可压缩且藉此吸收施加在半导体晶圆110上的接触应力的至少一部分。在一些实施例中,用于形成弹性盖体114的材料的弹性模量可以在垂直于升降销108的主轴的方向上变化。在一些实施例中,弹性盖体114远离支撑柱107的表面的部分的弹性模量可以大于弹性盖体114接近支撑柱107的表面的部分。在一些实施例中,弹性盖体114可以由多孔材料制成。可通过改变弹性盖体114中的孔隙量来改变弹性模量,其中更大的孔隙率通常会造成较低的弹性模量。在一些实施例中,弹性盖体114的弹性模量可介于50GPa至140GPa的范围内,但是也可使用具有更大或更小的弹性模量的材料。
可以使用方程式1来判定可通过使用弹性盖体来降低的接触力的量值,即由升降销108施加至半导体晶圆110的力的量值。
此外,可以使用方程式2来判定有效模量E
其中F
材料的蒲松比是材料在垂直于装载方向的方向上膨胀或收缩的量度。材料的杨氏模量是引起材料特定应变的应力量的量度。也就是说,杨氏模量是硬度的量度。杨氏模量越高,材料越硬。蒲松比和杨氏模量是半导体晶圆110和升降销108的弹性盖体114的选定材料的特性。
如在以上方程式1中所示,可通过各种实施例的应力降低特征来降低的接触力σ
图5A至图5C是另一实施例的升降销108的侧视图。图5A至图5C可包括附加的应力降低特征。应力降低元件可以与支撑柱107一体成型。在各种实施例中,升降销108的支撑柱107的直径可介于2mm至10mm的范围内。然而,可根据需要增加或减少支撑柱107的直径。
在图5A所示的第一方面,设置在支撑柱107的第二端107B上的尖端116a可以相对于传统的升降销具有圆角/扁平化。尖端116a可以是球形的,或者可以稍微扁平化成扁椭球形。如图5A所示,在尖端116a实质上是球形的实施例中,球面角基本上是180度。因此,此实施例的尖端116a的曲率半径可以与支撑柱107的半径相同。举例而言,如果支撑柱107的直径为4mm,则半径为2mm。使用如图5A所示的尖端,尖端116a的曲率半径也是2mm,且球面角实质上是180度。因此,在此实施例中,尖端116a的曲率半径可以与支撑柱107的半径相同(1:1)。
在图5B所示的第二方面中,设置在支撑柱107的第二端107B上的尖端116b可以具有比图5A所示实施例的尖端116a更大的平坦度。在如图5B所示的实施例中,升降销108可以具有尖端116b,尖端116b的形状可以被描述为扁球形或椭球形。举例而言,尖端116b的曲率半径可以是升降销108的支撑柱107的半径的两倍,结果形成约52.1度的球面角φ。在范例的升降销108中,其中支撑柱107的直径为4mm且支撑柱107的半径为2mm,如图5B所示的尖端116b的曲率半径可以为4mm,球面角可以为约52.1度。因此,在此实施例中,尖端116b的曲率半径可以是支撑柱107的半径的两倍(2:1)。
在图5C所示的第三方面中,设置在支撑柱107的第二端107B处的尖端116c可具有比图5A所示实施例的尖端116a和图5B所示实施例的尖端116b更大的平坦度。亦即,尖端116c具有更大的球面角。在一些实施例中,曲率半径可以是升降销108的支撑柱107的半径的5倍,进而形成约24度的球面角。在范例的升降销108中,其中支撑柱107的直径为4mm且支撑柱的半径为2mm,如图5C所示的尖端116的曲率半径可以是10mm,且球面角可以是约24度。因此,在此实施例中,尖端116c的曲率半径可以是支撑柱107的半径的五倍(5:1)。
在各种实施例中,尖端116a至116c的曲率半径可介于升降销108的支撑柱107的半径的1倍至5倍的范围内。换言之,与升降销108的支撑柱107的半径相比,尖端116a至116c的曲率半径可以是(1:1)至(5:1)。然而,尖端116a至116c的曲率半径可以根据需求增加或缩小。可替代地,可以根据球面角来说明尖端116a至116c。在各种实施例中,尖端116a至116c的球面角可介于24度至180度的范围内。举例而言,尖端的球面角可介于50度至180度的范围内。此外,尖端的球面角可介于90度至180度的范围内。通过提供更扁平(即具有较小的球面角φ)的销尖端116C,可以增加设置在升降销108的支撑柱107上的尖端(116a至116c)的表面积。增加的表面可以将施加在半导体晶圆110上的力分配在更大的表面积上,进而降低接触应力。
可通过使用方程式1来判定可通过使用弹性盖体来降低的接触力的量值,其中扁平的尖端116a至116c可以依照升降销108的直径D
图6A和图6B示出根据各种实施例的半导体晶圆加工系统200。半导体晶圆加工系统200包括具有至少一个铰接式机械手臂204的半导体晶圆转移设备202。铰接式机械手臂204的第一端203包括转移刀片208,而第二端205可旋转地连接至外壳201。可将铰接式机械手臂204配置以使其旋转且平移以更容易地转移半导体晶圆110。转移刀片208可配置以在将半导体晶圆110从第一前开式传送盒209-1转移至半导体工艺中的单元操作210的期间抬升且支撑半导体晶圆110。单元操作可以是但不限于遮蔽、沉积、蚀刻、化学机械抛光(chemical mechanical polishing;CMP)、离子注入或清洁等。在执行期望的单元操作加工步骤之后,可以通过相同或不同的铰接机械手臂204从单元操作上移除半导体晶圆110。在一方面,可以将半导体晶圆110转移到第二前开式传送盒209-2。第二前开式传送盒209-2可以经由轨道系统(未图示)被手动地或机械地运送到下一个单元操作210。另一方面,半导体晶圆加工系统200可以是在一群集内包括多个单元操作210的束型设备(未图示)的一部分。在此方面,半导体晶圆转移设备202可以在不使用前开式传送盒的情况下将半导体晶圆110从同一群集内的一个单元操作210转移到下一个单元操作210。
如图6B所示,可以操纵被支撑在晶圆转移设备202的转移刀片208上的半导体晶圆110,以使得半导体晶圆110位于与单元操作210相连的半导体晶圆支撑装置100(例如静电卡盘)的升降销108上方。可升起升降销108以支撑半导体晶圆110。一旦半导体晶圆110被升降销108支撑,则可移除转移刀片208。升降销108可包括参照图2至图5C所公开的任何应力降低特征。举例而言,图6B示出设置有弹簧112的升降销108。接着,可以将半导体晶圆110降低到半导体晶圆支撑装置100(例如静电卡盘)的顶面104。
图7示出束型设备220,束型设备220包括如上所述的晶圆转移设备202。如图7所示,束型设备220可被配置用于四个单元操作腔室210。每个单元操作可以在单元操作腔室210中进行。然而,束型设备220可被配置用于更多或更少的单元操作腔室210。束型设备220可配置有单独的入口222和单独的出口224,使得可通过单独的入口222将未处理的半导体晶圆110提供给束型设备220,且可通过单独的出口224将处理过的半导体晶圆110从束型设备220中移除。
图8示出根据一些实施例的转移半导体晶圆110的方法300的流程图。参照步骤302,可以用第一半导体晶圆支撑装置100来抬起半导体晶圆110。第一半导体晶圆支撑装置100可以包括被配置以接触半导体晶圆110的背面109的多个升降销108。升降销108的至少其中一个包括被配置以支撑半导体晶圆110的支撑柱107。支撑柱107包括第一端107A和第二端107B。升降销108亦包括图2至图5C所示的应力降低元件(例如弹簧112、弹性盖体114、具圆角的尖端116A、116B和116C),连接至支撑柱107的第一端107A或第二端107B中的任一个以降低升降销108与半导体晶圆110之间的接触应力。应力降低元件可包括弹性段部,或者与支撑柱一体成型。参照步骤304,可以在半导体晶圆110下方操纵转移刀片208。参照步骤306,可以降低升降销108,使得半导体晶圆110由转移刀片208支撑。参照步骤308,可利用转移刀片208将半导体晶圆110从第一位置转移到第二位置。在一些实施例中,第一位置可以是第一半导体处理单元操作210,第二位置可以是前开式传送盒209-2。
在一些实施例中,半导体晶圆110可以从第二位置转移到第三位置。在一些实施例中,第二位置可以是前开式传送盒209-1,而第三位置可以是第二单元操作210。此方法可包括利用转移刀片208从前开式传送盒209-1移除半导体晶圆110,操纵半导体晶圆110从前开式传送盒209-1至第二半导体处理单元操作210,且抬升第二半导体晶圆支撑设备100以支撑半导体晶圆110。第二单元操作210可以包括第二半导体晶圆支撑设备100,第二半导体晶圆支撑设备100被配置以支撑晶圆110。第二半导体晶圆支撑装置100可包括第二升降销108,第二升降销108被配置以接触半导体晶圆110的背面109和图2至图5C所示的至少一个第二应力降低特征(例如弹簧112、弹性盖体114、具圆角的尖端116a、116b和116c)。至少一个第二应力降低特征可以被配置以降低第二升降销108与半导体晶圆110之间的接触应力。相似于第一应力降低特征的至少一个第二应力降低特征可包括配置以接触支撑柱107的第一端107a的弹簧112、覆盖支撑柱107的第一端107A的弹性盖体114、具有扁球形(116a至116c)的支撑柱107的第一端107A或前述的组合。
一般而言,本公开的结构和方法可用于在半导体晶圆110上转移和执行单元操作210,同时减少在从半导体晶圆支撑装置100(例如静电卡盘)装载和卸载半导体晶圆110的期间由升降销108所造成对半导体晶圆110的损坏。减少对半导体晶圆110的损坏进而可减少从损坏的半导体晶圆影响到沉积在半导体晶圆上的层(特别是外延层)的损坏。在一些实施例中,半导体晶圆支撑装置100可设置有与支撑柱107的底端接触的弹簧112。当将半导体晶圆110装载/抬升到升降销108上时,弹簧112可以压缩且吸收半导体晶圆110上的应力的一部分。在另一实施例中,升降销108的尖端可以具有弹性盖体114。类似于先前实施例中的弹簧112,弹性盖体114可以具有允许弹性盖体114在半导体晶圆110被装载/抬升到升降销108上时压缩,藉以吸收半导体晶圆110上的应力一部分的弹性模量。在另一实施例中,升降销108可具有相较于传统的升降销更圆的尖端116a至116c。亦即,升降销108的支撑柱的尖端可以是扁平的形状或扁球形,而非终止于一点的尖端。如此一来,升降销108可具有较大的与半导体晶圆110的背面接触的表面积。较大的接触表面可以将施加在半导体晶圆110上的力分配在较大的表面积上,进而对于给定的接触力而言降低接触应力。
实施例涉及一种半导体晶圆支撑装置100,包括配置以与半导体晶圆110的背面109接触的升降销108。升降销108的其中至少一个包括配置以支撑半导体晶圆110的支撑柱107。支撑柱107包括第一端107A和第二端107B。半导体晶圆支撑装置100亦包括应力降低元件(例如弹簧112、弹性盖体114、具圆角的尖端116A、116B和116C),应力降低元件连接到支撑柱107的第一端107A或第二端107B中的任一个以降低应力。应力降低元件可包括弹性段部(例如弹簧112、弹性盖体114),或者与支撑柱一体成型(例如具圆角的尖端116A、116B和116C)。
在一些实施例中,弹性段部包括弹簧,配置以接触支撑柱的第一端,支撑柱的第二端接触半导体晶圆的背面,弹簧与支撑柱一体成型且配置以吸收升降销和半导体晶圆之间的接触应力的至少一部分。
在一些实施例中,弹簧具有侧向弹性常数介于7x10
在一些实施例中,弹性段部包括弹性盖体,覆盖支撑柱的第二端,弹性盖体吸收升降销和半导体晶圆之间的接触应力的至少一部分。
在一些实施例中,弹性盖体的弹性模量在垂直于升降销的主轴的方向上变化。
在一些实施例中,弹性盖体包括多孔材料。
在一些实施例中,应力降低元件与支撑柱一体成型,且包括具有扁椭球形的支撑柱的第二端,应力降低元件的曲率半径介于支撑柱的半径的1倍至5倍的范围内。
在一些实施例中,半导体晶圆支撑装置还包括静电卡盘,静电卡盘包括:配置以支撑半导体晶圆的基底以及位于基底中的多个开孔,其中升降销位于开孔中,且配置以从基底抬升半导体晶圆以及使半导体晶圆下降至基底上。
另一个实施例涉及一种半导体晶圆加工系统200,包括具有第一端和第二端的铰接式机械手臂204,位于铰接式机械手臂204的第一端的转移刀片208和半导体加工单元操作210。半导体加工单元操作210包括半导体晶圆支撑装置100。半导体晶圆支撑装置100可包括配置以与半导体晶圆110的背面109接触的升降销108。升降销108中的至少一个包括配置以支撑半导体晶圆110的支撑柱107。支撑柱107包括第一端107A和第二端107B。半导体晶圆支撑装置100亦包括应力降低元件(例如弹簧112、弹性盖体114、具圆角的尖端116A、116B和116C),应力降低元件连接到支撑柱107的第一端107A或第二端107B中的任一个以降低在升降销108和半导体晶圆110之间的接触应力。应力降低元件可包括弹性段部(例如弹簧112、弹性盖体114)或与支撑柱一体成型(例如具圆角的尖端116A、116B和116C)。
在一些实施例中,应力降低特征包括:弹簧,接触支撑柱的第一端,其中支撑柱的第二端接触半导体晶圆的背面,弹簧是配置以吸收升降销和半导体晶圆之间的接触应力的至少一部分;或者是弹性盖体,覆盖支撑柱的第二端,其中弹性盖体吸收升降销和半导体晶圆之间的接触应力的至少一部分;或者是支撑柱的第一端具有扁椭球形;或者是前述的组合。
在一些实施例中,铰接式机械手臂是配置以旋转和平移。
在一些实施例中,半导体晶圆加工系统还包括束型设备。
另一个实施例涉及转移半导体晶圆110的方法300,包括以第一半导体晶圆支撑装置100抬升半导体晶圆110。可以用第一半导体晶圆支撑装置100抬升半导体晶圆110。半导体晶圆支撑装置100可包括配置以与半导体晶圆110的背面109接触的升降销108。升降销108中的至少一个包括配置以支撑半导体晶圆110的支撑柱107。支撑柱107包括第一端107A和第二端107B。升降销108亦包括图2至图5C所示的应力降低元件(例如弹簧112、弹性盖体114、具圆角的尖端116A、116B和116C),其连接至支撑柱107的第一端107A或第二端107B中的任一个,以降低升降销108与半导体晶圆110之间的接触应力。应力降低元件可以包括弹性段部,或者与支撑柱一体成型。可以在半导体晶圆110下方操纵转移刀片208。可以降低升降销108,使得半导体晶圆110由转移刀片208支撑。参照步骤308,可以用转移刀片208将半导体晶圆110从第一位置转移到第二位置。
在一些实施例中,此方法还包括通过压缩接触支撑柱的第一端的多个弹簧来吸收接触应力。
在一些实施例中,此方法还包括通过压缩覆盖支撑柱的第二端的弹性盖体来吸收接触应力。
在一些实施例中,以第一半导体晶圆支撑装置将半导体晶圆抬升包括以在升降销的第一端具有扁椭球形的升降销接触半导体晶圆。
在一些实施例中,第一位置包括第一半导体加工单元操作,且第二位置包括前开式传送盒。
在一些实施例中,此方法还包括将半导体晶圆从第二位置转移至第三位置,藉由:以转移刀片从前开式传送盒移除半导体晶圆;将半导体晶圆从前开式传送盒操控至第二半导体加工单元操作;以及抬升第二半导体晶圆支撑装置以支撑半导体晶圆,第二半导体晶圆支撑装置包括:多个第二升降销,包括:支撑柱,配置以支撑半导体晶圆,支撑柱包括第一端和第二端;以及至少一应力降低元件,连接至支撑柱的第一端和第二端的其中一个,以减少第二升降销和半导体晶圆之间的接触应力,其中应力降低元件包括至少一第二应力降低特征。
在一些实施例中,第二应力降低特征包括:弹簧,配置以接触支撑柱,其中弹簧与支撑柱一体成型且配置以吸收第二升降销的第一端和半导体晶圆之间的接触应力的至少一部分;或者是弹性盖体,覆盖支撑柱的第二端,其中弹性盖体吸收第二升降销和半导体晶圆之间的接触应力的至少一部分;或者是支撑柱的第一端具有扁椭球形;或者是前述的组合。
在一些实施例中,第一半导体加工单元操作是配置以执行遮蔽、沉积、蚀刻、化学机械抛光、离子注入或清洁的其中一个。
以上概述了许多实施例的特征,使本公开所属技术领域中普通技术人员可以更加理解本公开的各实施例。本公开所属技术领域中普通技术人员应可理解,可以本公开实施例为基础轻易地设计或改变其他工艺及结构,以实现与在此介绍的实施例相同的目的及/或达到与在此介绍的实施例相同的优点。本公开所属技术领域中普通技术人员也应了解,这些相等的结构并未背离本公开的精神与范围。在不背离后附权利要求的精神与范围的前提下,可对本公开实施例进行各种改变、置换及变动。
- 半导体晶圆支撑装置、加工系统及半导体晶圆转移方法
- 半导体晶圆加工系统及加工半导体晶圆的方法