一种副斜井井底车场智能转载系统及控制方法
文献发布时间:2023-06-19 18:27:32
技术领域
本发明涉及矿井辅助运输领域,具体涉及一种副斜井井底车场智能转载系统及控制方法。
背景技术
矿井的电机车、单轨吊、转载机器人等运输系统是矿井辅助运输系统的主动脉,是运输系统安全、高效运行的重要保障。目前,电机车或单轨吊等运输系统的调度大多为人工调度,部分依靠可编程控制器为主的“信集闭”系统,通过人工操作,状态实现对井下运输车的调度,存在无法及时掌握井下路况信息、只能针对局部进行调度、运输效率低等问题。
随着井下现代开采技术自动化程度的提高,矿山企业面对如何提高工作效率、提高工作安全系数、提高运营效率等现状,对井下运输系统的自动化、信息化的需求也越来越高。对于现有的电机车或单轨吊等运输系统而言,如何提供一种能够高效的实现井下运输智能转载和有效控制的方法是实现无人化、少人化的技术难题。
发明内容
针对上述存在的技术不足,本发明的目的是提供一种副斜井井底车场智能转载系统及控制方法,其通过信息技术和智能控制方法,对井底车场信息、各种车辆的状态信息进行分析,实现井底车场的智能转载和自主运行,进而实现井底车场辅助运输的智能化并且提升运输的效率。
为解决上述技术问题,本发明采用如下技术方案:
一种副斜井井底车场智能转载系统,包括巷道以及转载运输设备,所述巷道包括副井、副井口车场、副斜井井底车场、大巷以及上部车场,所述转载运输设备为智能转载运输设备,包括:第一智能转载装置、提升机、空轨转载机器人、第二智能转载装置以及单轨吊机器人;其中:
所述的第一智能转载装置包括提升机专用勾头车、第一电机车机器人、第一平板车列以及第一信号检测单元,第一电机车机器人上集成有第一感知控制单元;所述的第二智能转载装置包括第二电机车机器人、第二平板车列以及第二信号检测单元,第二电机车机器人上集成有第二感知控制单元;所述的空轨转载机器人上集成有第三感知控制单元;所述的单轨吊机器人上集成有第四感知控制单元;
所述的第一信号检测单元,用于检测第一平板车列的位置信息和重量信息,并反馈至第一、第三感知控制单元;
所述的第二信号检测单元,用于检测第二平板车列的位置信息和重量信息,并反馈至第二、第四感知控制单元;
所述的第一感知控制单元,根据所接收到的第一平板车列的位置信息、重量信息,控制第一电机车机器人与第一平板车列连接/解离,控制第一电机车机器人启动/制停,控制提升机通过提升机专用勾头车与第一平板车列连接/解离;
所述的第一电机车机器人,在第一感知控制单元的控制下,能够与第一平板车列连接并带动第一平板车列在副井口车场的工业广场容器装载区与副井口车场的地地转载区之间往返穿梭;
所述的提升机,在第一感知控制单元的控制下,能够在第一电机车机器人与第一平板车列处于解离的状态下,通过提升机专用勾头车带动第一平板车列在副井口车场的地地转载区与副井坡底的容器地空转载区往返运输;
所述的第三感知控制单元,根据所接收到的第一平板车列的位置信息、重量信息,控制空轨转载机器人的启动/制停;
所述的空轨转载机器人,在第三感知控制单元的控制下,能够在副井坡底容器地空转载区以及第一待转载平板列车停泊位之间往复穿梭并能够将处于副井坡底容器地空转载区的第一平板车列上的满载标准容器吊装、转载至停靠在第一待转载平板列车停泊位的待装载第二平板车列上;第一待转载平板列车停泊位设置在副斜井井底车场上;
所述的第二感知控制单元,根据所接收到的第二平板车列的位置信息、重量信息,控制第二电机车机器人与第二平板车列连接/解离;
所述的第二电机车机器人,在第二感知控制单元的控制下,能够与第二平板车列连接并带动第二平板车列沿着第一待转载平板列车停泊位、大巷、第二待转载平板列车停泊位往返穿梭,第二待转载平板列车停泊位设置于上部车场;
所述的第四感知控制单元,根据所接收到的第二平板车列的位置信息、重量信息,控制单轨吊机器人启动/制停;
所述的单轨吊机器人,在第四感知控制单元的控制下,能够将处于上部车场容器地空转载位的第二平板车列上的满载标准容器转载至工作面顺槽卸载,并能够将卸载后的标准容器运回第二平板车列。
优选地,所述副井口车场包括工业广场容器装载区、第一地轨线路以及第一阻车装置;其中:
第一地轨线路从工业广场容器装载区延伸至副井井口位置处,并在紧靠着副井的井口位置处通过配设第一阻车装置形成副井口车场的地地转载区,在紧靠着工业广场容器装载区的位置处设置有轨道吊;
所述轨道吊上集成有第五感知控制单元;
所述的第一信号检测单元所检测到的第一平板车列的位置信息、重量信息能够反馈至第五感知控制单元;
所述第五感知控制单元能够通过所接收到的第一平板车列的位置信息和重量信息控制轨道吊工作;
所述轨道吊在第五感知控制单元的控制下,能够将工业广场容器装载区堆置的满载标准容器吊装至处于工业广场容器装载区的空载第一平板车列上,直至第一平板车列满载;
所述的第一电机车机器人,在第一感知控制单元的控制下,带动第一平板车列沿着第一地轨线路在工业广场容器装载区、副井口车场的地地转载区之间往返运行。
优选地,所述的副斜井井底车场包括副井坡底、第二地轨线路、转载空轨线路以及第一待转载平板列车停泊位;其中:
第二地轨线路从副井坡底延伸到大巷的下端,且第二地轨线路通过在紧靠着副井坡底的位置处设置第二阻车装置以形成前述的副井坡底的容器地空转载区;
第二地轨线路的部分线路配设有两端均与第二地轨线路连接的第一并行支路;第一并行支路上设置有第一待转载平板列车停泊位;第一并行支路在第一待转载平板列车停泊位的两侧分别对应地设置第三、第四阻车装置;
转载空轨线路在巷道地面的投影线与第一并行支路重合,且转载空轨线路在巷道地面的投影线的一端能够延伸至副井坡底的容器地空转载区,另一端则能够延伸至第一待转载平板列车停泊位;
所述的空轨转载机器人能够悬挂在转载空轨线路上并沿着转载空轨线路运行;
所述的第二电机车机器人,在第二感知控制单元的控制下,带动第二平板车列沿着第二地轨线路运行。
优选地,所述的上部车场包括第三地轨线路、轨道下山、第二待转载平板列车停泊位以及单轨吊空轨线路;其中:
第三地轨线路从大巷的上端延伸到轨道下山,且第三地轨线路的部分线路配设有两端均与第三地轨线路连接的第二并行支路;所述的第二并行支路上设置有第二待转载平板列车停泊位,且第二待转载平板列车停泊位通过在第二并行支路上配设第五、第六阻车装置而形成;
单轨吊空轨线路在巷道地面的投影线与第二并行支路重合,且单轨吊空轨线路在巷道地面的投影线的一端能够延伸至第二待转载平板列车停泊位,另一端则能够延伸至工作面顺槽;
所述的单轨吊机器人,在第四感知控制单元的控制下,能够悬挂连接在单轨吊空轨线路的下方并在第二待转载平板列车停泊位、工作面顺槽之间往返运行;
所述的第二电机车机器人,在第二感知控制单元的控制下,带动第二平板车列能够顺序沿着第二地轨线路的第一待转载平板列车停泊位、大巷、第三地轨线路第二待转载平板列车停泊位往返运行。
优选地,所述的第一、第二信号检测单元均包括称重单元、GPS模块;
所述第一信号检测单元的称重单元用于检测第一平板车列的重量信息,所述第一信号检测单元的GPS模块用于检测第一平板车列的位置信息;
所述第二信号检测单元的称重单元用于检测第二平板车列的重量信息,所述第二信号检测单元的GPS模块用于检测第二平板车列的位置信息。
本发明的另一个技术目的是提供一种上述的副斜井井底车场智能转载系统的控制方法,通过协调控制第一智能转载装置、提升机,实现工业广场容器装载区的满载标准容器与副井坡底的容器地空转载区之间的转载调度;通过协调控制第一智能转载装置以及空轨转载机器人,实现停靠在副井坡底的容器地空转载区的满载第一平板车列的转载调度;通过协调控制第二智能转载装置、单轨吊转载机器人,实现停靠在上部车场的第二待转载平板列车停泊位的满载第二平板车列的转载调度。
优选地,工业广场容器装载区的满载标准容器与副井坡底的容器地空转载区之间的转载调度,具体包括如下步骤:
S01:第一信号检测单元将第一平板车列的位置信息和重量信息通过通信模块分别发送给第一、第五感知控制单元;第五感知控制单元对所接收到的第一平板车列的位置信息和重量信息进行处理后,表明第一平板车列处于工业广场容器装载区并呈空载状态时,向轨道吊的执行机构发出执行指令,控制轨道吊的执行机构将料场的满载标准容器吊装到空载的第一平板车列上,直至该空载的第一平板车列满载;
S02:第一感知控制单元对所接收到的第一平板车列的位置信息和重量信息进行处理后,表明第一平板车列处于工业广场容器装载区并呈满载状态时,向第一电机车机器人发送执行指令;
S03:第一电机车机器人接收到执行指令后,自动行驶到满载的第一平板车列所在位置后,通过自动连接装置与满载的第一平板车列连接,而后启动第一电机车机器人,推动满载的第一平板车列行至副井口车场的第一阻车装置处;
S04:第一电机车机器人推动满载的第一平板车列到达副井口车场的第一阻车装置处后,第一电机车机器人与满载的第一平板车列之间自动脱开;提升机专用勾头车接收到执行指令,朝向满载的第一平板车列移动以致能够与第一平板车列自动连接;
S05:提升机接收到执行指令,挂载提升机专用勾头车与满载的第一平板车列下井至副井坡底的第二阻车装置处;
S06:满载的第一平板车列在副井坡底完成满载标准容器转载;
S07:提升机内集成的感知控制单元对所接收到的第一平板车列的位置信息和重量信息进行处理后,表明第一平板车列处于副井坡底并呈空载状态时,向提升机发出执行指令,控制提升机挂载提升机专用勾头车与空载的第一平板车列,并回收上井;
S08:上井后在副井口车场的第一阻车装置处停止,空载的第一平板车列与提升机专用勾头车自动脱离,与第一电机车机器人自动连接;
S09:第一电机车机器人拉动空载的第一平板车列回到工业广场容器装载区;在此之前轨道吊在第五感知控制单元的控制下将料场满载标准容器吊装到另一组待装载的第一平板车列,完成对另一组待装载的第一平板车列的装载;
S10:第一电机车机器人与空载的第一平板车列到达工业广场容器装载区的停车区后自动脱离,自动运行至另一组满载的第一平板车列位置,并与满载的第一平板车列通过自动连接装置连接;
第一电机车机器人推动满载的第一平板车列抵达至副井口车场的阻车装置处,进行下一轮作业。
优选地,通过协调控制空轨转载机器人、第二智能转载装置,完成步骤S06步骤所述的满载的第一平板车列在副井坡底完成容器转载,具体包括如下步骤:
S0601:在提升机专用勾头车携带满载的第一平板车列即将抵达副井坡底的阻车装置处时,将自己的重量信息和位置信息发送给空轨转载机器人上所集成的第三感知控制单元;
S0602:第三感知控制单元接到信号后,发出执行指令,控制空轨转载机器人前往满载的第一平板车列处将满载标准容器吊装、转运至停靠在第一待转载平板列车停泊位的待转载第二平板车列;
S0603:待转载的第二平板车列装满后将自己的重量信息和位置信息发送到第二电机车机器人上所集成的第一感知控制单元;
S0604:第一感知控制单元接到信号后,发出执行指令,控制第二电机车机器人拖动满载的第二平板车列经大巷前往上部车场的第二待转载平板列车停泊位;
S0605:满载的第二平板车列抵达上部车场的第六阻车装置后,将自己的重量信息和位置信息发送到单轨吊机器人上所集成的第四感知控制单元;第四感知控制单元接到信号后,发出执行指令,控制单轨吊机器人将第二平板车列的满载标准容器转载;
S0606:转载完成后,第二平板车列就将自己的重量信息和位置信息发送给第二电机车机器人上的,第二电机车机器人拖动回收空载的第二平板车列返回进入副斜井井底车场,推动空载的第二平板车列进入空泊位,等待空轨转载机器人的转载;
完成后,第二电机车机器人与第二平板车列自动脱离,等待下一次运输调度的开始。
优选地,步骤S0605中,上部车场的单轨吊机器人将平板车列的满载标准容器转载,具体包括如下步骤:
S060501:待转载车列停靠进入阻车位置后向单轨吊机器人发送重量信息和位置信息;
S060502:单轨吊机器人接收到信息后,通过感知控制单元前往吊装;
S060503:单轨吊机器人携带满载标准容器沿单轨吊空轨线路自主运行至工作面顺槽;
S060504:在工作面顺槽卸载后,将空载标准容器运回;
S060505:单轨吊机器人往返,直至待转载平板车列完成转载作业;
电机车机器人将完成转载的空容器平板车列回收。
本发明的有益效果在于:
通过信息技术,将标准容器或者平板车列的重量和位置信息通过远距离无线传输技术传递给机器人感知控制单元,机器人感知控制单元汇总多种信息并控制每一个机器人的运动行为。本发明实现了对平板车重量和位置信息的监控、对每一个机器人周边环境的感知以及对机器人本身的控制,及时准确地掌握副斜井井底车场的生产运行状况,智能高效地实现副斜井井底车场装载过程,达到优化转载过程、提高转载效率、取得较高经济效益的目的。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
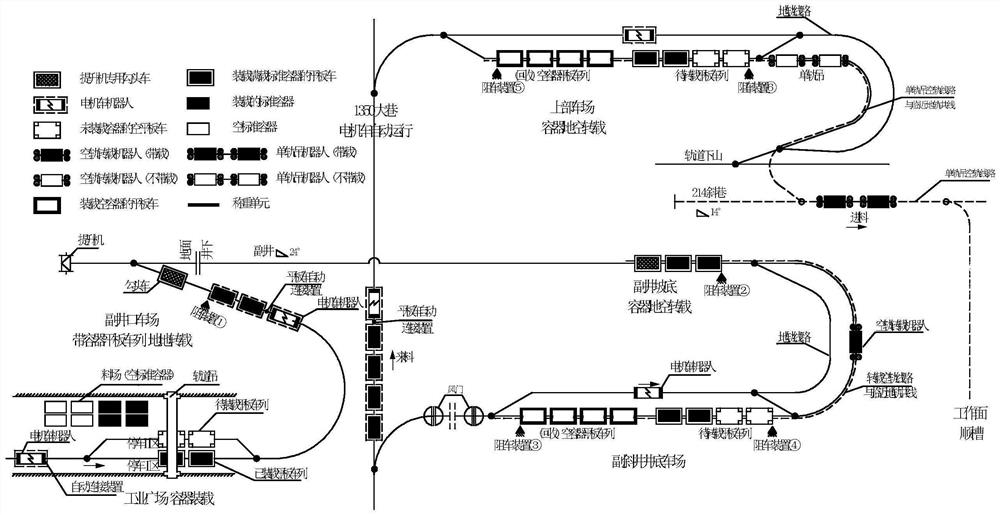
图1为本发明实施例提供的矿采三区辅运机器人系统平面示意图的框架图;
图2为本发明实施例提供的地面工业广场及副井口车场装载、转载及车列调度示意图;
图3为本发明实施例提供的井底车场电机车机器人容器转载及车列调度示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
为便于叙述,本发明将穿梭在副井口车场与副井坡底之间的电机车机器人、平板车列对应地记为第一电机车机器人、第一平板车列,将穿梭在副斜井井底车场与上部车场之间的电机车机器人、平板车列对应地记为第二电机车机器人、第二平板车列。
如图1至图3所示,本发明所述的副斜井井底车场智能转载系统,包括巷道以及转载运输设备,所述巷道包括副井、副井口车场、副斜井井底车场、大巷以及上部车场,所述转载运输设备为智能转载运输设备,包括:第一智能转载装置、提升机、空轨转载机器人、第二智能转载装置以及单轨吊机器人;其中:
所述的第一智能转载装置包括提升机专用勾头车、第一电机车机器人、第一平板车列以及第一信号检测单元,第一电机车机器人上集成有第一感知控制单元;所述的第二智能转载装置包括第二电机车机器人、第二平板车列以及第二信号检测单元,第二电机车机器人上集成有第二感知控制单元;所述的空轨转载机器人上集成有第三感知控制单元;所述的单轨吊机器人上集成有第四感知控制单元;
所述的第一信号检测单元,用于检测第一平板车列的位置信息和重量信息,并反馈至第一、第三感知控制单元;
所述的第二信号检测单元,用于检测第二平板车列的位置信息和重量信息,并反馈至第二、第四感知控制单元;
所述的第一感知控制单元,根据所接收到的第一平板车列的位置信息、重量信息,控制第一电机车机器人与第一平板车列连接/解离,控制第一电机车机器人启动/制停,控制提升机通过提升机专用勾头车与第一平板车列连接/解离;
所述的第一电机车机器人,在第一感知控制单元的控制下,能够与第一平板车列连接并带动第一平板车列在副井口车场的工业广场容器装载区与副井口车场的地地转载区之间往返穿梭;
所述的提升机,在第一感知控制单元的控制下,能够在第一电机车机器人与第一平板车列处于解离的状态下,通过提升机专用勾头车带动第一平板车列在副井口车场的地地转载区与副井坡底的容器地空转载区往返运输;
所述的第三感知控制单元,根据所接收到的第一平板车列的位置信息、重量信息,控制空轨转载机器人的启动/制停;
所述的空轨转载机器人,在第三感知控制单元的控制下,能够在副井坡底容器地空转载区以及第一待转载平板列车停泊位之间往复穿梭并能够将处于副井坡底容器地空转载区的第一平板车列上的满载标准容器吊装、转载至停靠在第一待转载平板列车停泊位的待装载第二平板车列上;第一待转载平板列车停泊位设置在副斜井井底车场上;
所述的第二感知控制单元,根据所接收到的第二平板车列的位置信息、重量信息,控制第二电机车机器人与第二平板车列连接/解离;
所述的第二电机车机器人,在第二感知控制单元的控制下,能够与第二平板车列连接并带动第二平板车列沿着第一待转载平板列车停泊位、大巷、第二待转载平板列车停泊位往返穿梭,第二待转载平板列车停泊位设置于上部车场;
所述的第四感知控制单元,根据所接收到的第二平板车列的位置信息、重量信息,控制单轨吊机器人启动/制停;
所述的单轨吊机器人,在第四感知控制单元的控制下,能够将处于上部车场容器地空转载位的第二平板车列上的满载标准容器转载至工作面顺槽卸载,并能够将卸载后的标准容器运回第二平板车列。
优选地,所述副井口车场包括工业广场容器装载区、第一地轨线路以及第一阻车装置;其中:
第一地轨线路从工业广场容器装载区延伸至副井井口位置处,并在紧靠着副井的井口位置处通过配设第一阻车装置形成副井口车场的地地转载区,在紧靠着工业广场容器装载区的位置处设置有轨道吊;
所述轨道吊上集成有第五感知控制单元;
所述的第一信号检测单元所检测到的第一平板车列的位置信息、重量信息能够反馈至第五感知控制单元;
所述第五感知控制单元能够通过所接收到的第一平板车列的位置信息和重量信息控制轨道吊工作;
所述轨道吊在第五感知控制单元的控制下,能够将工业广场容器装载区堆置的满载标准容器吊装至处于工业广场容器装载区的空载第一平板车列上,直至第一平板车列满载;
所述的第一电机车机器人,在第一感知控制单元的控制下,带动第一平板车列沿着第一地轨线路在工业广场容器装载区、副井口车场的地地转载区之间往返运行。
优选地,所述的副斜井井底车场包括副井坡底、第二地轨线路、转载空轨线路以及第一待转载平板列车停泊位;其中:
第二地轨线路从副井坡底延伸到大巷的下端,且第二地轨线路通过在紧靠着副井坡底的位置处设置第二阻车装置以形成前述的副井坡底的容器地空转载区;
第二地轨线路的部分线路配设有两端均与第二地轨线路连接的第一并行支路;第一并行支路上设置有第一待转载平板列车停泊位;第一并行支路在第一待转载平板列车停泊位的两侧分别对应地设置第三、第四阻车装置;
转载空轨线路在巷道地面的投影线与第一并行支路重合,且转载空轨线路在巷道地面的投影线的一端能够延伸至副井坡底的容器地空转载区,另一端则能够延伸至第一待转载平板列车停泊位;
所述的空轨转载机器人能够悬挂在转载空轨线路上并沿着转载空轨线路运行;
所述的第二电机车机器人,在第二感知控制单元的控制下,带动第二平板车列沿着第二地轨线路运行。
优选地,所述的上部车场包括第三地轨线路、轨道下山、第二待转载平板列车停泊位以及单轨吊空轨线路;其中:
第三地轨线路从大巷的上端延伸到轨道下山,且第三地轨线路的部分线路配设有两端均与第三地轨线路连接的第二并行支路;所述的第二并行支路上设置有第二待转载平板列车停泊位,且第二待转载平板列车停泊位通过在第二并行支路上配设第五、第六阻车装置而形成;
单轨吊空轨线路在巷道地面的投影线与第二并行支路重合,且单轨吊空轨线路在巷道地面的投影线的一端能够延伸至第二待转载平板列车停泊位,另一端则能够延伸至工作面顺槽;
所述的单轨吊机器人,在第四感知控制单元的控制下,能够悬挂连接在单轨吊空轨线路的下方并在第二待转载平板列车停泊位、工作面顺槽之间往返运行;
所述的第二电机车机器人,在第二感知控制单元的控制下,带动第二平板车列能够顺序沿着第二地轨线路的第一待转载平板列车停泊位、大巷、第三地轨线路第二待转载平板列车停泊位往返运行。
优选地,所述的第一、第二信号检测单元均包括称重单元、GPS模块;
所述第一信号检测单元的称重单元用于检测第一平板车列的重量信息,所述第一信号检测单元的GPS模块用于检测第一平板车列的位置信息;
所述第二信号检测单元的称重单元用于检测第二平板车列的重量信息,所述第二信号检测单元的GPS模块用于检测第二平板车列的位置信息。
基于上述的副斜井井底车场智能转载系统,本发明公开了一种副斜井井底车场智能转载系统的控制方法,包括以下步骤:
S01:轨道吊通过感知控制单元感知料场标准容器的位置信息和重量信息,通过对信息的处理和环境感知自动控制轨道吊将料场满载标准容器吊装到待装载的第一平板车列上,直至该待装载的第一平板车列的重量因承载标准容器而增重到满载,成为满载的第一平板车列(或者为已装载的第一平板车列);
S02:满载的第一平板车列将自身的位置信息和重量信息通过通信模块发送给第一电机车机器人;
S03:第一电机车机器人收到信息后,通过感知控制单元自动行驶到满载的第一平板车列所在位置,并通过自动连接装置与满载的第一平板车列连接,推动满载的第一平板车列至副井口车场的阻车装置处;
S04:到达副井口车场的阻车装置处后,第一电机车机器人与满载的第一平板车列之间自动脱开,而勾头车则与满载的第一平板车列自动连接;
S05:提升机挂载勾头车与满载的第一平板车列下井至副井坡底的阻车装置处;
S06:第一平板车列在副井坡底所在位置处将满载的第一平板车列上的标准容器通过空轨转载机器人转载至第二平板车列,以完成容器转载;此过程中,满载的第一平板车列在转载后的重量减轻到空载状态,成为空载的第一平板车列,而空载的第二平板车列的重量因承载标准容器而增重到满载,成为满载的第二平板车列;
S07:空载的第一平板车列将自身位置信息和重量信息通过通信模块发送给提升机,提升机接到信息后挂载勾头车与空载的第一平板车列回收上井;
S08:上井后在副井口车场的阻车装置处停止,空载的第一平板车列与勾头车自动脱离,与第一电机车机器人自动连接;
S09:第一电机车机器人拉动空载平板车列到工业广场容器装载区,在此之前轨道吊通过感知控制单元将料场满载标准容器吊装到另一组待装载的第一平板车列(空载的第一平板车列),完成对另一组待装载的第一平板车列的装载;
S10:第一电机车机器人与空载的第一平板车列到达工业广场容器装载区的停车区后自动脱离,自动运行至另一组满载的第一平板车列位置,并与满载的第一平板车列通过自动连接装置连接;
S11:第一电机车机器人推动满载的第一平板车列抵达至副井口车场的阻车装置处,进行下一轮作业。
具体实施过程中,步骤S06平板车列在副井坡底完成容器转载,包括以下步骤:
S0601:在勾头车携带满载的第一平板车列即将抵达副井坡底的阻车装置处时,将自己的重量信息和位置信息发送给空轨转载机器人;
S0602:空轨转载机器人接到信号后,前往满载的第一平板车列处将标准容器吊装、转运至待转载的第二平板车列;
S0603:待转载的第二平板车列装满后将自己的重量信息和位置信息发送到第二电机车机器人;
S0604:第二电机车机器人接到信号后,拖动满载的第二平板车列至大巷,并随之前往上部车场;
S0605:第二平板车列抵达上部车场的阻车装置后,将自己的重量信息和位置信息发送到单轨吊机器人,单轨吊机器人将第二平板车列的满载标准容器转载;
S0606:转载完成后,第二平板车列就将自己的重量信息和位置信息发送给第二电机车机器人,第二电机车机器人拖动回收空载的第二平板车列返回进入副斜井井底车场,推动空载的第二平板车列进入空泊位,等待空轨转载机器人的转载;
S0607:完成后,第二电机车机器人与第二平板车列自动脱离,等待下一次运输调度的开始。
具体实施过程中,步骤S0605上部车场的单轨吊机器人将平板车列的满载标准容器转载,包括以下步骤:
S060501:待转载的第二平板车列(即为满载的第二平板车列)停靠进入上部车场的阻车位置后向单轨吊机器人发送重量信息和位置信息;
S060502:单轨吊机器人接收到信息后,通过感知控制单元前往第二平板车列的所在位置并吊装、转运第二平板车列上的满载标准容器;
S060503:单轨吊机器人携带满载标准容器沿单轨吊空轨线路自主运行至工作面顺槽;
S060504:在工作面顺槽卸载后,将空载标准容器运回;
S060505:单轨吊机器人往返,直至待转载的第二平板车列完成转载作业;
S060506:第二电机车机器人将完成转载的第二空容器平板车列回收。
本发明中,根据不同的转运阶段和标准容器的重量信息和位置信息,进一步计算标准容器达到下一个目的地的时间,进而合理、高效的安排各机器人的工作,从而实现副斜井井底车场智能转载和高效控制。
以上所述仅是本发明的实施例。显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
- 一种停车场智能控制方法和系统
- 一种尿不湿智能感应器及使用方法、控制系统和控制方法
- 一种家用空调集成系统、智能控制系统及控制方法
- 一种斜井井口不规则车场的推车调运系统及推车调运方法
- 一种斜井井口不规则车场的推车调运系统及推车调运方法