一种适用于半挂车的防折叠预警控制系统
文献发布时间:2023-06-19 18:30:43
技术领域:
本发明涉及交通事故预警领域,具体地涉及一种适用于半挂车的防折叠预警控制系统。用于在半挂车行驶时,通过获取路面环境与车辆行驶状态信息,对半挂车可能发生折叠危险进行预警提示,提高驾驶员的警惕性,预防交通事故的发生。
背景技术:
在快递行业与干线运输蓬勃发展的时代形势下,市场对半挂车的需求量越来越大,而随之产生的交通事故问题也越来越严峻。由于半挂车具有装载量打、重心高、铰接处相互耦合以及后部放大作用的特点,致使其容易发生折叠危险。
鉴于半挂车的需求量急剧增大,国家相关法规与相应的安全防护措施也逐渐完善,从被动安全技术到主动安全技术,这些都提高了驾驶员行车的安全性,但这些措施是建立在折叠危险已经发生的前提下,这也对驾驶员的能力提出了要求。
发明内容:
本发明的目的在于提出一种适用于半挂车的防折叠预警控制系统,通过获取路面环境与车辆行驶状态信息,对半挂车可能发生折叠危险进行预警提示。为了实现上述目的,本发明的技术方案如下:
一种适用于半挂车的防折叠预警控制系统包括驾驶员安全模块和旁车安全模块以及大数据采集模块;其中驾驶员安全模块包括驾驶员信息采集子模块、车辆道路信息采集子模块、折叠危险预测子模块、驾驶员安全执行子模块;其中旁车安全模块包括道路旁车信息采集子模块、驾驶员安全信息评估子模块、旁车安全区域预估子模块和旁车安全执行子模块;
技术方案所述的驾驶员安全模块分为驾驶员信息采集子模块与车辆道路信息采集子模块;其中驾驶员信息采集子模块通过驾驶舱内置摄像头采集驾驶员行为信息,驾驶员行为信息分为正常行为信息和历史违规信息;正常行为信息包括是否存在手机娱乐行为、是否双手持方向盘、记录眼皮跳动次数;通过驾驶员行为信息判断专注度评价等级;其中车辆道路信息采集子模块通过车载传感器采集车辆自身行驶信息包括当前车速、横摆角速度、侧向加速度、前后车车距、路面附着系数、道路坡度、道路曲率和铰接角变化率;其中车辆道路信息采集子模块还包括路面环境识别器,路面环境识别器根据车辆道路信息采集子模块采集的道路参数信息识别此时的路面状况,包括冰雪路面、低附路面、大坡度路面、曲率路面。
技术方案所述的驾驶员安全模块包括折叠危险预测子模块,折叠危险预测子模块通过对驾驶员信息采集子模块与车辆道路信息采集子模块所采集的信息进行处理和整合,设计有驾驶员行为偏向系数和车辆道路偏向系数;其中驾驶员行为偏向系数由驾驶员信息采集子模块所判断的专注度评价等级定义,其中车辆道路偏向系数由车身稳定性权重系数、路面安全权重系数和折叠危险权重系数共同确定;其中车身稳定性权重系数由当前车速、横摆角速度、侧向加速度、前后车车距信息的参数信息利用模糊控制确定;其中路面安全权重系数由路面附着系数、道路坡度、道路曲率的参数信息利用模糊控制确定,其中折叠危险权重系数由铰接角变化率的参数信息利用模糊控制确定;由以上步骤,评估此时行车的折叠危险程度。
技术方案所述的驾驶员安全模块包括驾驶员安全执行子模块;驾驶员安全执行子模块包括感应警示子模块和行为警示子模块;其中感应警示子模块包括语音警示和灯光闪烁;其中行为警示子模块包括制动提示;
技术方案所述的旁车安全模块包括道路旁车信息采集子模块与驾驶员安全信息评估子模块;其中道路旁车信息采集子模块收集旁车数量信息、旁车速度信息、旁车横向车距信息、旁车纵向车距信息;其中驾驶员安全信息评估子模块接收由驾驶员安全模块中的折叠危险预测子模块计算的参数信息;再一步地,通过道路旁车信息采集子模块与驾驶员安全信息评估子模块所采集的参数信息评价旁车行驶安全程度;
技术方案所述的旁车安全模块包括旁车安全执行子模块;旁车安全区域预估子模块包括感应警示子模块和行为警示子模块;其中感应警示子模块包括语音警示和灯光闪烁;其中行为警示子模块包括制动提示和变道提示;
技术方案所述的旁车安全模块包括旁车安全区域预估子模块;旁车安全区域预估子模块通过双无迹粒子滤波算法预测旁车行驶的安全区域;
技术方案所述的大数据采集模块,利用神经网络算法对驾驶员安全模块和旁车安全模块所收集的参数进行训练,能够更准确地估算出折叠事故发生的概率。
驾驶员安全模块中驾驶员信息采集子模块所获取的驾驶员行为信息来定义专注度评价等级,专注度评价等级分为专注、懒散两个等级,其评价方法分为以下步骤:
1)用拟定公式计算专注度评价等级;
Z
其中,S
2)S
a)若驾驶员进行手机娱乐则S
b)若驾驶员未双手持方向盘则S
c)若驾驶员半分钟内眼皮跳动次数小于20次,此时设定驾驶员为疲劳状态,则S
S
若驾驶员存在历史违规信息且其时限在半年以内,则S
3)条件权重系数w
4)若1≤Z
若0≤Z
路面环境识别器通过车载前置摄像头获取前方道路环境视图,并根据车辆道路信息采集子模块所收集的路面附着系数、道路坡度、道路曲率信息,在驾驶舱内提醒驾驶员即将遭遇的路面情况,包括冰雪路面、低附路面、大坡度路面、曲率路面;路面情况识别步骤如下:
通过车辆道路信息采集子模块所收集的参数信息区分不同路面情况下所占的比例大小,来识别此时的路面情况;
当0.8≤E≤1时,此时路面环境识别器反馈的参数信息为0.1,此时路面识别为冰雪路面;
当0.6≤E<0.8时,此时路面环境识别器反馈的参数信息为0.3,此时路面识别为低附路面;
当0.3≤E<0.6时,此时路面环境识别器反馈的参数信息为0.5,此时路面识别为大坡度路面;
当0≤E<0.3时,此时路面环境识别器反馈的参数信息为0.8,此时路面识别为曲率路面;
其中E为路面比例分配系数,δ
折叠危险预测子模块通过对驾驶员信息采集子模块与车辆道路信息采集子模块所采集的信息进行处理整合,确定了折叠危险程度;折叠危险程度的计算方法如下:
1)
其中N
2)X
若专注度评价等级Z
若专注度评价等级Z
其中w
3)车身稳定性权重系数w
4)当专注度评价等级为懒散,X
当专注度评价等级为专注,X
当专注度评价等级为专注,X
驾驶员安全模块根据折叠危险预测子模块估算出的折叠危险稳定值N
1)当折叠危险发生概率为0≤P<0.5时,此时危险等级为相对安全;驾驶舱内闪烁黄灯,直至0≤Z
2)当折叠危险发生概率为0.5≤P<0.75时,此时危险等级为一般危险;驾驶舱内闪烁红灯,同时语音提示驾驶员进行制动操作,直至0≤Z
3)当折叠危险发生概率为0.75≤P≤1时,此时危险等级为紧急危险;驾驶舱内外同时闪烁红灯,同时语音提醒驾驶员变道,制动并靠边停车,直至操作完成,警报解除;
旁车安全模块接收驾驶员安全模块的折叠危险预测子模块的信息,并通过对旁车数量信息、旁车速度信息、旁车横向车距信息、旁车纵向车距信息的采集,进一步地,确定旁车危险程度信息,具体计算步骤如下:
1)
其中D
2)旁车危险权重系数w
3)当N
当N
当0≤N
技术方案所述的旁车安全模块还包括旁车安全执行子模块,其控制模式如下:
1)当N
2)当N
3)当0≤N
技术方案所述的旁车安全模块包括旁车安全区域预估子模块;旁车安全区域预估子模块通过双无迹粒子滤波算法预测旁车行驶的安全区域;
安全点状态预测方程如下:
x
其中,x
技术方案所述的大数据采集模块利用神经网络算法对驾驶员安全模块和旁车安全模块所收集的参数进行训练,从而更准确地估算出折叠事故发生的概率;该神经网络包括两个子神经网络,分别为驾驶员子神经网络和旁车子神经网络,每个子神经网络又分为三层,分别为输入层、隐含层、输出层;对于驾驶员子神经网络,用驾驶员安全模块采集的信息对驾驶员子神经网络进行训练,包括驾驶员行为信息和车辆道路信息,其中驾驶员行为信息包括是否存在手机娱乐行为、是否双手持方向盘、眼皮跳动次数以及历史违规信息;其中车辆道路信息包括当前车速、横摆角速度、侧向加速度、前后车车距、路面附着系数、道路坡度、道路曲率和铰接角变化率;对于旁车子神经网络,用旁车安全模块采集的信息对旁车子神经网络进行训练,其中旁车安全信息包括旁车数量信息、旁车速度信息、旁车横向车距信息、旁车纵向车距信息;驾驶员子神经网络和旁车子神经网络输出层输出为0-100%之间的概率值,以此判断折叠危险事故发生的概率。
与现有技术相比,本发明的有益效果为:
1.上述方案建立了驾驶员安全模块和旁车安全模块,从道路环境和车辆本身的状态进行监测,降低了折叠危险发生的可能性,同时提高了驾驶员行车的安全性。
2.现有的一些主动安全装置虽然能在一定程度上保证行车安全性,但是这些安全装置的触发都是基于折叠危险已经发生的前提下,本发明在折叠危险可能发生前对驾驶员以及旁车驾驶员预警提醒,从上一层努力降低交通事故发生的可能性。
附图说明:
下面将结合附图及实施例对本发明作进一步说明,附图中:
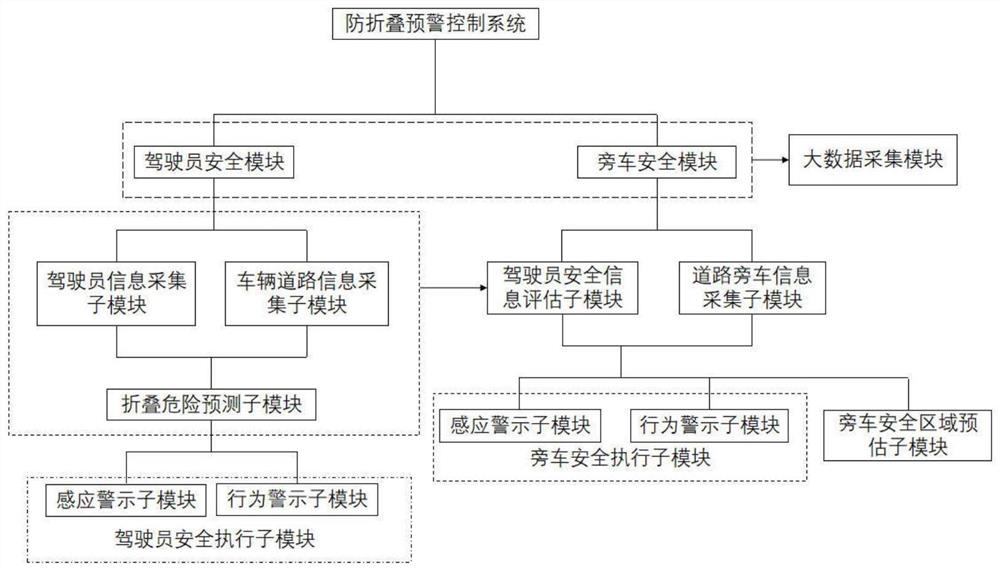
图1为本发明的系统组成框图;
具体实施方式:
下面结合附图对本发明的具体实施方式做详细的描述。
参阅图1,图1为本发明的系统组成框图,该适用于半挂车的防折叠预警控制系统包括驾驶员安全模块和旁车安全模块以及大数据采集模块;其中驾驶员安全模块包括驾驶员信息采集子模块、车辆道路信息采集子模块、折叠危险预测子模块、驾驶员安全执行子模块;其中旁车安全模块包括道路旁车信息采集子模块、驾驶员安全信息评估子模块、旁车安全区域预估子模块和旁车安全执行子模块;
所述的驾驶员安全模块分为驾驶员信息采集子模块与车辆道路信息采集子模块;其中驾驶员信息采集子模块通过驾驶舱内置摄像头采集驾驶员行为信息,驾驶员行为信息分为正常行为信息和历史违规信息;正常行为信息包括是否存在手机娱乐行为、是否双手持方向盘、记录眼皮跳动次数;通过驾驶员行为信息拟定专注度评价等级;其中车辆道路信息采集子模块通过车载传感器采集车辆自身行驶信息包括当前车速、横摆角速度、侧向加速度、前后车车距、路面附着系数、道路坡度、道路曲率和铰接角变化率;其中车辆道路信息采集子模块还包括路面环境识别器,路面环境识别器根据车辆道路信息采集子模块采集的道路参数信息识别此时的路面状况,包括冰雪路面、低附路面、大坡度路面、曲率路面。
所述的驾驶员安全模块包括折叠危险预测子模块,折叠危险预测子模块通过对驾驶员信息采集子模块与车辆道路信息采集子模块所采集的信息进行处理和整合,设计有驾驶员行为偏向系数和车辆道路偏向系数;其中驾驶员行为偏向系数由驾驶员信息采集子模块所拟定的专注度评价等级定义,其中车辆道路偏向系数由车身稳定性权重系数、路面安全权重系数和折叠危险权重系数共同确定;其中车身稳定性权重系数由当前车速、横摆角速度、侧向加速度、前后车车距信息的参数信息利用模糊控制确定;其中路面安全权重系数由路面附着系数、道路坡度、道路曲率的参数信息利用模糊控制确定,其中折叠危险权重系数由铰接角变化率的参数信息利用模糊控制确定;由以上步骤,评估此时行车的折叠危险程度。
所述的驾驶员安全模块包括驾驶员安全执行子模块;驾驶员安全执行子模块包括感应警示子模块和行为警示子模块;其中感应警示子模块包括语音警示和灯光闪烁;其中行为警示子模块包括制动提示。
所述的旁车安全模块包括道路旁车信息采集子模块与驾驶员安全信息评估子模块;其中道路旁车信息采集子模块收集旁车数量信息、旁车速度信息、旁车横向车距信息、旁车纵向车距信息;其中驾驶员安全信息评估子模块接收由驾驶员安全模块中的折叠危险预测子模块计算的参数信息;再一步地,通过道路旁车信息采集子模块与驾驶员安全信息评估子模块所采集的参数信息评价旁车行驶安全程度。
所述的旁车安全模块包括旁车安全执行子模块;旁车安全执行子模块包括感应警示子模块和行为警示子模块;其中感应警示子模块包括语音警示和灯光闪烁;其中行为警示子模块包括制动提示和变道提示。
所述的旁车安全模块还包括旁车安全区域预估子模块;旁车安全区域预估子模块通过双无迹粒子滤波算法预测旁车行驶的安全区域。
所述的大数据采集模块,利用神经网络算法对驾驶员安全模块和旁车安全模块所收集的参数进行训练,能够更准确地估算出折叠事故发生的概率。
所述驾驶员安全模块中的驾驶员信息采集子模块所获取的驾驶员行为信息来定义专注度评价等级,专注度评价等级分为专注、懒散两个等级,其评价方法分为以下步骤:
1)用拟定公式计算专注度评价等级;
Z
其中,S
2)S
a)若驾驶员进行手机娱乐则S
b)若驾驶员未双手持方向盘则S
c)若驾驶员半分钟内眼皮跳动次数小于20次,此时设定驾驶员为疲劳状态,则S
S
若驾驶员存在历史违规信息且其时限在半年以内,则S
3)条件权重系数w
若0≤Z
路面环境识别器通过车载前置摄像头获取前方道路环境视图,并根据车辆道路信息采集子模块所收集的路面附着系数、道路坡度、道路曲率信息,在驾驶舱内提醒驾驶员即将遭遇的路面情况,包括冰雪路面、低附路面、大坡度路面、曲率路面;路面情况识别步骤如下:
通过车辆道路信息采集子模块所收集的参数信息区分不同路面情况下所占的比例大小,来识别此时的路面情况;
当0.8≤E≤1时,此时路面环境识别器反馈的参数信息为0.1,此时路面识别为冰雪路面;
当0.6≤E<0.8时,此时路面环境识别器反馈的参数信息为0.3,此时路面识别为低附路面;
当0.3≤E<0.6时,此时路面环境识别器反馈的参数信息为0.5,此时路面识别为大坡度路面;
当0≤E<0.3时,此时路面环境识别器反馈的参数信息为0.8,此时路面识别为曲率路面;
其中E为路面比例分配系数,δ
折叠危险预测子模块通过对驾驶员信息采集子模块与车辆道路信息采集子模块所采集的信息进行处理整合,确定了折叠危险程度;折叠危险程度的计算方法如下:
1)
其中N
2)X
若专注度评价等级Z
若专注度评价等级Z
其中w
3)车身稳定性权重系数w
4)当专注度评价等级为懒散,X
当专注度评价等级为专注,X
当专注度评价等级为专注,X
驾驶员安全模块根据折叠危险预测子模块估算出的折叠危险稳定值N
1)当折叠危险发生概率为0≤P<0.5时,此时危险等级为相对安全;驾驶舱内闪烁黄灯,直至0≤Z
2)当折叠危险发生概率为0.5≤P<0.75时,此时危险等级为一般危险;驾驶舱内闪烁红灯,同时语音提示驾驶员进行制动操作,直至0≤Z
3)当折叠危险发生概率为0.75≤P≤1时,此时危险等级为紧急危险;驾驶舱内外同时闪烁红灯,同时语音提醒驾驶员变道,制动并靠边停车,直至操作完成,警报解除;
旁车安全模块接收驾驶员安全模块的折叠危险预测子模块的信息,并通过对旁车数量信息、旁车速度信息、旁车横向车距信息、旁车纵向车距信息的采集,进一步地,确定旁车危险程度信息,具体计算步骤如下:
1)
其中D
2)旁车危险权重系数w
3)当N
当N
当0≤N
所述的旁车安全模块包括旁车安全执行子模块,其控制模式如下:
1)当N
2)当N
3)当0≤N
所述的旁车安全模块包括旁车安全区域预估子模块;旁车安全区域预估子模块通过双无迹粒子滤波算法预测旁车行驶的安全区域;
安全点状态预测方程如下:
x
其中,x
所述的大数据采集模块利用神经网络算法对驾驶员安全模块和旁车安全模块所收集的参数进行训练,从而更准确地估算出折叠事故发生的概率;该神经网络包括两个子神经网络,分别为驾驶员子神经网络和旁车子神经网络,每个子神经网络又分为三层,分别为输入层、隐含层、输出层;对于驾驶员子神经网络,用驾驶员安全模块采集的信息对驾驶员子神经网络进行训练,包括驾驶员行为信息和车辆道路信息,其中驾驶员行为信息包括是否存在手机娱乐行为、是否双手持方向盘、眼皮跳动次数以及历史违规信息;其中车辆道路信息包括当前车速、横摆角速度、侧向加速度、前后车车距、路面附着系数、道路坡度、道路曲率和铰接角变化率;对于旁车子神经网络,用旁车安全模块采集的信息对旁车子神经网络进行训练,其中旁车安全信息包括旁车数量信息、旁车速度信息、旁车横向车距信息、旁车纵向车距信息;驾驶员子神经网络和旁车子神经网络输出层输出为0-100%之间的概率值,以此判断折叠危险事故发生的概率。
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的技术人员来说,在不脱离本发明所述原理的前提下,还可以做出若干改进和等同替换,这些改进和等同替换也应视为本发明的保护范围。
- 一种折叠半挂车
- 一种五轴半挂车主动转向差角控制系统
- 一种适用于半挂车防折叠的协同控制系统
- 一种半挂车的防折叠及防侧翻装置