一种可调式微动椎间融合器
文献发布时间:2024-01-17 01:19:37
技术领域
本发明涉及医用材料技术领域,具体涉及一种可调式微动椎间融合器。
背景技术
随着近年来人们生活方式的改变,椎体的发病率和手术率逐年增高,并且呈现年轻化趋势。颈椎间盘退变或颈椎损伤等引起的颈椎骨质增生,或由颈椎间盘脱出、后纵韧带和黄靭带增厚,刺激或压迫脊髓、颈部神经、血管而导致的不同临床症状的综合征;下胸椎是不稳定性胸椎骨折以及强直性脊柱炎患者脊柱骨折的多发部位;腰椎间盘突出症、腰椎滑脱症和腰椎管狭窄症等腰椎退行性病变,引发椎间盘变性、小关节骨性增生、中央管狭窄、节段不稳定和软骨终板退变等,严重地可引起机械性背痛、神经根症状、间歇性跛行、甚至大小便失禁等。椎体病变导致患者活动能力降低、生活质量下降。
大量的临床实践以及长期的术后随访证实了脊柱融合术具有对于椎体序列稳定性的维持、对脊髓或神经根压迫的解除、对神经功能的保护的效果。通过手术可以减轻神经组织的损伤,同时置入椎间融合器,或伴有椎体前方固定,可以保持椎间孔高度,并且有利于促进融合,为患者提供颈椎节段的稳定性和关节融合的强度。
目前市面上的椎间融合器种类和形状较多,早先主要为横向放置的中空楔形、椭圆和肾形植入物,通过上下表面的阵列凸点或线使融合器固定在椎间。近期,市面上出现在上下表面添加斜入的插片和(或)螺钉的椎间融合器,但是斜入的固定部件对椎体的把持力相对较弱。同时,椎间融合器相较于人体椎间盘的刚度较大,导致融合节段间活动性能大大减弱。
发明内容
本发明的目的是提供一种可调式微动椎间融合器。
为解决上述技术问题,本发明的目的是这样实现的:
一种可调式微动椎间融合器,包括:融合器本体;
所述融合器本体包括第一本体和第二本体;所述第一本体与所述第二本体通过微动结构重叠连接为一体,且两者均包括铰接的第一段和第二段;所述第二段靠近铰接处的端部设置有竖直的第一螺钉孔,远离所述第一段的端部开设有竖直的第二螺钉孔;所述第一段远离所述第二段的端部开设有竖直的第三螺钉孔;
所述第一螺钉孔、所述第二螺钉孔和所述第三螺钉孔内设置有螺钉;所述螺钉通过驱动机构带动沿螺纹孔上升或下降植入椎体。
在上述方案的基础上并作为上述方案的优选方案,所述驱动机构包括包括传动通道、蜗轮、蜗杆、起子;所述传动通道由第二段远离所述第一段的端部延伸至所述第二螺钉孔处,且与三个螺钉孔连通;所述蜗轮套接于所述螺钉外部,与所述螺钉同步转动,且可相对所述螺钉上下滑动;所述蜗杆可转动地固定于所述传动通道内部,并与所述蜗轮啮合,中心开设有内六角通道;所述起子一端部设置为六角柱,可配合所述内六角通道驱动所述蜗杆转动;所述起子另一端位于所述传动通道外。
在上述方案的基础上并作为上述方案的优选方案,所述螺钉包括螺纹段、六角段;所述蜗轮中心开设六边形通槽,配合地滑动套接于所述六角段上。
在上述方案的基础上并作为上述方案的优选方案,所述螺钉内部内部中空形成有空腔;所述空腔内部设置有钽丝。
在上述方案的基础上并作为上述方案的优选方案,还包括把持器;所述把持器可拆卸地固定连接于所述第二段远离所述第一段的端部,且沿所述第二段的长度方向延伸,并于一侧内凹开设起子导槽以限位所述起子;所述起子导槽对准所述传动通道。
在上述方案的基础上并作为上述方案的优选方案,所述把持器通过螺杆与所述第二段螺纹固定连接;所述螺杆贯穿所述把持器与所述第二段端部的螺纹孔螺纹连接。
在上述方案的基础上并作为上述方案的优选方案,所述微动结构的数量为三个,分别设置在所述第一螺钉孔、所述第二螺钉孔和所述第三螺钉孔对应处,包括弹性体、微动凹槽和微动凸块;所述微动凹槽开设于所述第一本体底部;所述微动凸块固定于所述第二本体底部,可插入所述微动凹槽内部,且插入后可相对移动;所述弹性体设置在所述微动凹槽与所述微动凸块之间,两端分别抵接所述微动凹槽底部和所述微动凸块底部。
在上述方案的基础上并作为上述方案的优选方案,所述微动凸块呈中空圆柱结构,顶部被分给呈若干瓣,其顶端外圆周设置有卡扣;所述微动凹槽呈与所述微动凸块相适配的圆柱形凹槽,并于中部开设有卡槽以配合所述卡扣;所述卡槽的高度大于所述卡扣的高度,当所述卡扣卡入后仍可相对移动。
在上述方案的基础上并作为上述方案的优选方案,所述弹性体为球囊、弹簧、高弹性材料的一种。
本发明的有益效果是:
1、本发明所提供的融合体本体包括上下重叠的第一本体和第二本体,两本体间通过微动连接,植入人体后上下椎体可产生竖直方向上的位移,与此同时,融合节段根据受力方向的不同,上下椎体椎体在冠状面与矢状面上可形成一定的活动角度。微动结构使上下椎间具有一定的活动度,更接近椎体原本结构,降低植入的异物感,提高患者的舒适度。
2、融合器本体通过垂直的螺钉实现与上下椎体的固定,相较于市面上在椎体外沿斜向置钉或插片,可大大提升螺钉在椎体中的把持能力。同时配合起子可实现在椎体间较深处有效地垂直置钉,利于提高融合体与椎体的连接强度。
3、融合器本体包括相铰接的第一段和第二段,植入时呈直线,可减小植入手术创口的尺寸;植入后可弯折,可提高融合器本体的承力面积。
附图说明
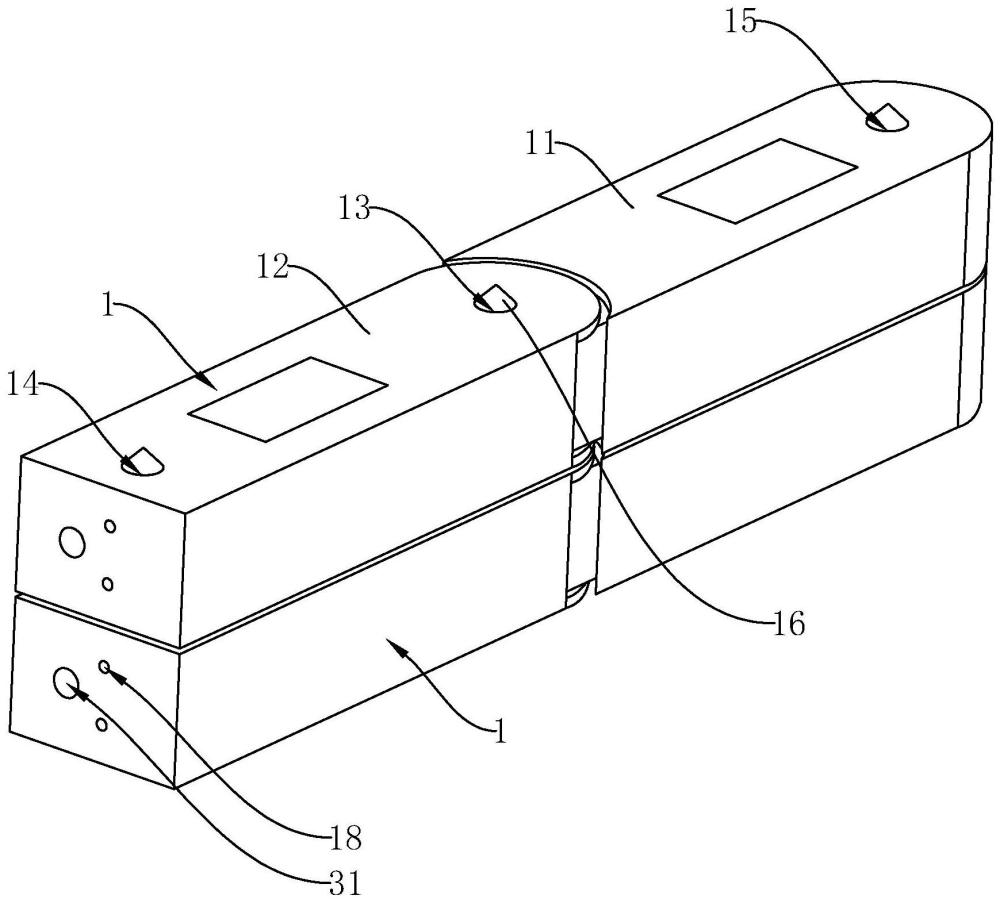
图1为本发明结构融合器本体示意图。
图2为本发明第一本体结构示意图。
图3为本发明第二本体结构示意图。
图4为本发明融合器本体配合把持器及起子示意图。
图5为本发明把持器和起子配合示意图。
图6为本发明驱动机构结构示意图。
图7为本发明螺钉结构示意图。
图8为本发明微动结构结构示意图。
图9为本发明微动凸块结构示意图。
图中:1、第一本体;2、第二本体;11、第一段;12、第二段;13、第一螺钉孔;14、第二螺钉孔;15、第三螺钉孔;16、螺钉;161、螺纹段;162、六角段;17、钽丝;18、螺纹孔;31、传动通道;32、蜗轮;33、蜗杆;34、起子;35、内六角通道;4、微动结构;41、弹性体;42、微动凹槽;42、微动凸块;44、卡扣;45、卡槽;5、把持器;51、起子导槽;52、螺杆。
具体实施方式
下面结合附图和具体实施例对本发明进一步说明。
如图1至图4所示,一种可调式微动椎间融合器,包括:融合器本体,融合器本体包括第一本体1和第二本体2。第一本体1与第二本体2通过微动结构4重叠连接为一体,且两者均包括铰接的第一段11和第二段12。所述第二段12靠近铰接处的端部设置有竖直的第一螺钉孔13,远离所述第一段11的端部开设有竖直的第二螺钉孔14,第一段11远离第二段12的端部开设有竖直的第三螺钉孔15。
第一螺钉孔13、第二螺钉孔14和第三螺钉孔15内设置有螺钉16,螺钉16通过驱动机构带动沿螺纹孔上升或下降植入椎体。
本实施例中,第一本体1位于第二本体2上方,第一本体1上的螺钉孔向上开设,其内部的螺钉16与上椎体连接,第二本体2的螺钉孔向下开设,其内部的螺钉16与下椎体连接。并且,优选地,第二段12远离第一段11的端面为平面,第一段11远离第二段12的端部呈圆弧面,植入时,以圆弧面为头,平面为尾。
其中,如图6所示,驱动机构包括包括传动通道31、蜗轮32、蜗杆33和起子34。
传动通道31由第二段12远离第一段11的端部延伸至第二螺钉孔14处,且与三个螺钉孔连通。
蜗轮32套接于螺钉16外部,与螺钉16同步转动,且可相对螺钉16上下滑动。蜗轮32设置于融合体本体内部,且可转动,转动时带动螺钉16同步转动,螺钉16转动时配合螺钉孔实现上下移动,转入上下椎体实现融合器的固定。优选地,如图7所示,螺钉16包括螺纹段161和六角段162,螺纹段161位于六角段162的上方。蜗轮32中心开设六边形通槽,配合地滑动套接于六角段162上,以此实现蜗轮32与螺钉16的同步转动和相对上下滑动。
进一步的,螺钉16内部内部中空形成有空腔,空腔内部设置有钽丝17。由于椎体的遮挡,手术时需要X光判断螺钉16的位置,以便螺钉16准确的到达预置钉处,而钽丝17可提高X光效果,方便医生识别螺钉16。
蜗杆33可转动地固定于传动通道31内部,并与蜗轮32啮合,中心开设有内六角通道35。蜗杆33与融合体本体转动连接,转动可驱动蜗轮32转动。
起子34一端部设置为六角柱,可配合内六角通道35驱动蜗杆33转动。起子34另一端位于传动通道31外,由人工或设备带动转动。六角柱的粗细大于起子34本体的粗细,使起子34可穿过内六角通道35。
另外,如图4和图5所示,融合器本体还配置有把持器5。把持器5可拆卸地固定连接于第二段12远离第一段11的端部,且沿第二段12的长度方向延伸,并于一侧内凹开设起子导槽51以限位起子34,起子导槽51对准传动通道31。起子34通过起子导槽51可准确的对准传动通道31,方便起子34与蜗杆33的配合搭接。
具体说,把持器5通过螺杆52与第二段12螺纹固定连接,螺杆52贯穿把持器5与第二段12端部的螺纹孔18螺纹连接。优选地,螺钉52的数量为两根,分布于起子导槽51的上下两侧边处。
本实施例中,微动结构4的数量为三个,分别设置在第一螺钉孔13、第二螺钉孔14和第三螺钉孔15对应处,如图8和图9所示,包括弹性体41、微动凹槽42和微动凸块43。
微动凹槽42开设于第一本体1底部。微动凸块43固定于第二本体2底部,可插入微动凹槽42内部,且插入后可相对移动。弹性体41设置在微动凹槽42与微动凸块43之间,两端分别抵接微动凹槽42底部和微动凸块43底部。
具体说,微动凸块43呈中空圆柱结构,顶部被分给呈若干瓣,若干瓣之间存在间隙,使微动凸块43顶部可挤压缩小。微动凸块43顶端外圆周设置有卡扣44。微动凹槽42呈与微动凸块43相适配的圆柱形凹槽,并于中部开设有卡槽45以配合卡扣44。卡槽45的高度大于卡扣44的高度,当卡扣44卡入后仍可相对移动。当微动凸块43插入微动凹槽42中时,其头部挤压缩小,直至卡扣44进入卡槽45后方复原。所述卡槽45的高度大于卡扣44的高度是指卡槽45沿融合器本体的高度方向的开设的深度大于卡扣44的厚度,当卡扣44卡于卡槽45中时,微动凸块43仍可向微动凹槽42底部移动一小段距离,实现微动。同时卡扣44外圆周直径也小于卡槽45的直径,使微动凸块43可相对微动凹槽42左右微动。
优选地,弹性体41为球囊、弹簧、高弹性材料的一种。
植入过程:将装配好的融合器本体与把持器5螺纹连接,然后插入起子34使之与第三螺钉孔15对应的螺钉16的蜗杆33配合,之后使融合器本体呈直线斜插植入椎体间,至预定位置后,转动起子34带动第三螺钉孔15内的螺钉16植入椎体;然后拔出起子34,转动融合体本体使之折弯,至预定位置后,插入起子34与第一螺钉孔12的螺钉16配合使之转入椎体,完成后退起子34至与第二螺钉孔14内的螺钉16配合,旋动使螺钉16转入椎体,然后退出起子34和卸下把持器5。
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思做出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
- 一种椎间用可调间距的膨胀式融合器
- 一种楔入式可调节椎间固定融合器