矿区破碎站的操控系统及其控制方法
文献发布时间:2024-01-17 01:27:33
技术领域
本发明涉及一种矿区破碎站的操控系统和矿区破碎站的控制方法。
背景技术
矿用卡车在矿区进行作业时在其装载物料之后需要将物料运输到破碎站,作为矿区运输中的重要目的地之一的破碎站目前主要是通过工作人员或破碎站的控制设备对信息进行处理和执行的,而后台控制中心通常只用于显示信息,其并不实际用于处理接收到的信息。
另外,破碎站一般通过信号灯来指示矿用卡车进行卸料或等待作业。对此,在无人矿用卡车的情况下其通过自身携带的摄像头对破碎站的信号灯进行感知检测,如果是例如雨天、或逆光等状态下无人矿用卡车的摄像头就会有被遮挡并进而无法正确识别信号灯的风险,由此影响无人矿用卡车及时做出有效的决策。
由于破碎站内对物料的破碎过程需要时间,因此在破碎站内通常需要限制矿用卡车的行驶速度。在此,常规的限制速度通常是矿用卡车通过地图语义信息获得的,由于地图更新复杂且非实时的,因此这种常规的限制速度通常是固定的。但是在破碎站内的行驶路面状态不佳时(这例如可能受到天气的影响或者特殊原因),就需要及时地更新破碎站内的受限制的行驶速度,并将其发送给矿用卡车,由此避免在破碎站内发生事故。
发明内容
本发明的目的是提供一种矿区破碎站的操控系统,该操控系统利用后台控制中心的强大数据处理功能对破碎站的运行状态进行判断和控制。另外该操控系统还能够根据破碎站的不同情况实时地提供矿用卡车在所述破碎站内的受限制的行驶速度。
该目的通过一种矿区破碎站的操控系统实现,所述操控系统包括:
信息采集设备、控制设备和后台控制中心,所述信息采集设备和所述控制设备设置于破碎站中或附近,所述信息采集设备检测破碎站的状态参数,所述控制设备以通信的方式从所述信息采集设备接收所述状态参数并将其以通信的方式发送给后台控制中心,所述后台控制中心基于接收到的状态参数得出对破碎站的操控指令并将所述操控指令发送给所述控制设备以基于所述控制指令对破碎站进行操控。在此,后台控制中心基于大量的数据和强大的处理功能,能够快速且高效地做出最优的判断并发出操控指令。
根据一种优选的实施方式,所述操控系统还包括执行设备,所述控制设备在接收到后台控制中心的控制指令之后控制所述执行设备对所述破碎站执行相应的动作。
根据一种优选的实施方式,所述状态参数包括破碎站的运行状态、定位信息和故障信息。
根据一种优选的实施方式,所述控制指令包括矿用卡车在所述破碎站内的受限制的行驶速度以及卸料点允许的卸料状态。通过提供矿用卡车在所述破碎站内的受限制的行驶速度以及卸料点允许的卸料状态能够及时地更新破碎站中的重要信息,由此确保矿用卡车和破碎站的安全和正常运行。
根据一种优选的实施方式,所述操控系统包括信号灯以提示卸料状态。通过冗余地用信号灯来指示卸料状态,从而更可靠地提供破碎站信息。
根据一种优选的实施方式,所述操控系统包括紧急停止按钮,其允许在破碎站出现故障的情况下通过经过授权的人员操作以停止破碎运转。破碎站故障例如包括破碎机故障或正在卸料的矿用卡车发生故障等情况。紧急停止按钮作为安全冗余设备在破碎站故障时或者尤其在通信故障的情况下紧急停止按钮能够确保破碎站的安全。
根据一种优选的实施方式,所述后台控制中心能够远程控制破碎站的启动和停止。
根据一种优选的实施方式,所述矿用卡车为无人矿用卡车。
根据一种优选的实施方式,所述破碎站是无人破碎站。这种无人破碎站以及无人矿用卡车的设置能够完全自动化地进行生产操作,节省了人力和物力。
本发明还涉及一种矿区破碎站的控制方法,所述控制方法通过上述操控系统执行,所述控制方法包括:
通过信息采集设备检测破碎站的状态参数并以通信的方式将所述状态参数发送给破碎站的控制设备,
所述控制设备将接收到的状态参数以通信的方式发送给后台控制中心,
所述后台控制中心基于接收到的状态参数得出对破碎站的控制指令并将所述控制指令发送给所述控制设备以基于所述控制指令对破碎站进行控制。
根据一种优选的实施方式,所述控制设备将矿用卡车在所述破碎站内的受限制的行驶速度以及卸料点允许的卸料状态以通信的方式发送给破碎站附近的矿用卡车。
根据一种优选的实施方式,所述后台控制中心能够远程控制破碎站的启动和停止。
所述矿区破碎站的控制方法具有上述操控系统的提及的优点。
附图说明
以下结合附图以具体实施例的方式对本发明的技术方案作进一步描述,但本发明并不限于这些实施例。这里所描述的仅仅是根据本发明的优选实施方式,本领域技术人员可以在所述优选实施方式的基础上想到能够实现本发明的其他方式,所述其他方式同样落入本发明的范围。
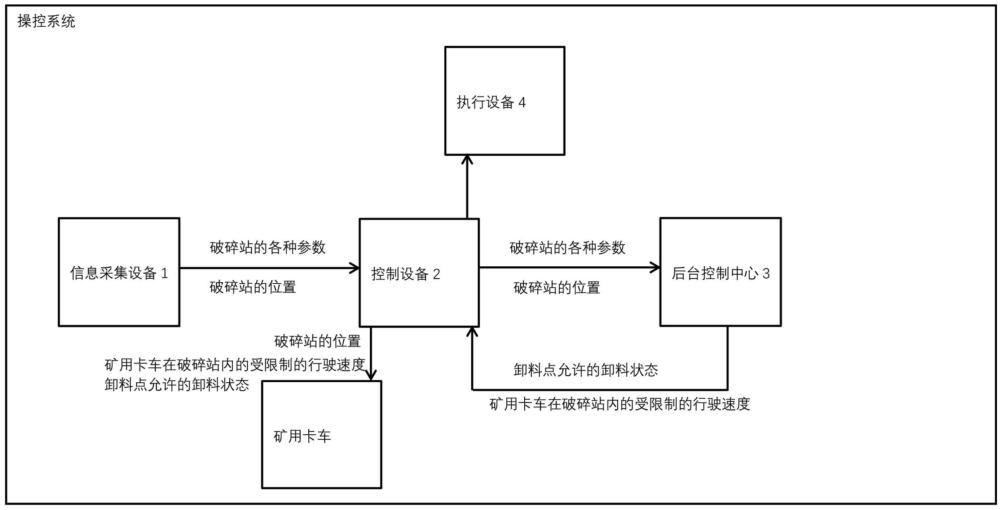
图1示出了矿区破碎站的操控系统的信息流程图。
具体实施方式
以下结合附图以具体实施例的方式对本发明的技术方案作进一步描述,但本发明并不限于这些实施例。这里所描述的仅仅是根据本发明的优选实施方式,本领域技术人员可以在所述优选实施方式的基础上想到能够实现本发明的其他方式,所述其他方式同样落入本发明的范围。对于附图,方向性的术语,例如“上”、“下”、“左”、“右”、“前”、“后”等,是参照所描述的附图的定向而使用的。由于本发明的实施方式的组件能够被以多种定向实施,这些方向性术语是用于说明的目的,而不是限制的目的。
矿用卡车在矿区中装载物料完成之后需要将物料运输到破碎站。根据本发明的矿区破碎站的操控系统包括信息采集设备1和控制设备2。该信息采集设备1和控制设备2设置在破碎站中或破碎站附近。该信息采集设备1用于检测破碎站的各种参数、优选状态参数,这些参数例如可为破碎站内待卸料的矿用卡车的数量及其在破碎站内的行驶速度、破碎站的路面行驶状况、破碎站中的破碎机当前的运行状态、破碎机当前的破碎速度或破碎量、破碎站的运行故障(例如包括破碎机故障或正在卸料的矿用卡车发生故障等)等。
该信息采集设备1例如可包括一种或多种不同的传感器,通过这些传感器检测上面提及的破碎站的各种参数。另外,该信息采集设备1例如还包括全球定位系统GPS,通过GPS可对破碎站进行定位,例如破碎站安装有全球导航卫星系统实时差分定位RTK。替代地,通过手持式RTK定位破碎站的位置。
信息采集设备1与控制设备2以通信的方式连接,信息采集设备1将采集到的各种参数以及破碎站的位置发送给控制设备2。控制设备2与后台控制中心3以通信的方式连接,控制设备2在接收到这些参数以及破碎站的位置之后,将这些参数和破碎站的位置发送给后台控制中心3。
后台控制中心3例如包括处理器。在后台控制中心3中能够自动地或手动地设定破碎站的运行状态,该运行状态例如包括破碎站每小时或每一天的破碎量、可以卸载多少台矿用卡车等变量。在此,后台控制中心3可基于上述变量和接收到的上述参数得出矿用卡车在破碎站内的受限制的行驶速度、卸料点允许的卸料状态等控制指令。其中,卸料点允许的卸料状态例如可包括允许卸料和禁止卸料。后台控制中心3可将得出的控制指令、例如矿用卡车在破碎站内的受限制的行驶速度、卸料点允许的卸料状态等发送给破碎站的控制设备2,以对破碎站内的运行状态进行操控。
操控系统还具有执行设备4,控制设备2在接收到后台控制中心3的控制指令之后控制执行设备4进行相应的动作。例如执行设备4可根据后台控制中心3提供的破碎站每小时或每一天的破碎量来操控破碎机的破碎速度或根据后台控制中心3的控制指令允许矿用卡车卸料或禁止其卸料。
优选地,后台控制中心3还具有远程控制破碎站启动和停止的功能。例如当破碎站设备出现故障而无法正常卸载时,当破碎站发送的定位信息出现严重偏离(即,定位系统可能受到干扰)时,或当破碎站停滞等待卸载的车辆过多时,后台控制中心3可以借助其强大的处理单元,必要时通过人员介入,分析判断是否控制破碎站停机和/或做出相应决策,所述决策例如可以是停止后续车辆的继续卸载工作,停止所有工作并进行定位系统的确认,调度部分车辆驶离至别处破碎站,等等。例如,后台控制中心3能够在接收到破碎站故障信息时远程地操控破碎站停机,在破碎站消除故障之后远程地操控破碎站再次启动。
在此也可考虑信息采集设备1能够与后台控制中心3以通信的方式连接,使得信息采集设备1能够将采集到的信息、例如上述参数以及破碎站的位置直接地发送给后台控制中心3,而不是经由控制设备2发送给后台控制中心。
在本发明中,矿用卡车包括无人驾驶的矿用卡车(也简称为无人矿用卡车)和有人驾驶的矿用卡车。在此,后台控制中心3和/或破碎站的控制设备2与矿用卡车以通信的方式连接。例如在矿用卡车上安装有车用无线通信部V2X,矿用卡车借助V2X可从后台控制中心3和/或破碎站的控制设备2接收矿用卡车在破碎站内的受限制的行驶速度、卸料点允许的卸料状态等,以用于车辆控制决策。当然其他的通信方式也是可能的,例如可想到4G/5G/WiFi的通信方式。
如果在有人驾驶的矿用卡车的情况下,也可在矿用卡车上配备的显示装置上实时地为驾驶员显示在破碎站内的受限制的行驶速度、卸料点允许的卸料状态等,以使驾驶员能够根据上述信息确定驾驶决策。
另外,矿用卡车可借助V2X从后台控制中心3和/或破碎站的控制设备2和/或信息采集设备1接收破碎站的位置。
本发明中的矿用卡车优选为无人矿用卡车,本发明中的破碎站优选为无人破碎站。但是本发明的不限于无人矿用卡车和无人破碎站,也可应用在有人驾驶的矿用卡车和有人操作的破碎站中。
优选地,破碎站还附加地设有信号灯,信号灯可设置为多种不同的颜色以表示不同的运行情况。例如可将信号灯设置为红色和绿色,信号灯红色时表示禁止卸料或卸料停止,而绿色信号灯时表示正常卸料。当然其他的信号灯设置也是可能的,只要能够明确地表示出破碎站的行驶状态和/或卸料状态。在这种情况下,对于无人矿用卡车可附加地安装信号灯感知设备,以便附加地识别破碎站的运行状态以便可靠地确保安全平稳地运行。而对于有人驾驶的矿用卡车,可简单地通过驾驶员视觉上对信号灯的识别来确定驾驶决策。
附加地,破碎站还设备紧急停止按钮,该紧急停止按钮可在出现故障或安全隐患的情况下通过经过授权的人员来操作,例如通过输入密码或使用安全密匙来触发紧急停止按钮。例如在破碎站的破碎机或正在卸料的矿用卡车发生故障的情况下,为了确保人员安全,可通过经过授权的人员触发该紧急停止按钮使得破碎站停止运转。例如在破碎机损坏或破碎机被卡住时可触发该紧急停止按钮。尤其在通信故障的情况下这种紧急停止按钮能够确保破碎站的安全。
下面参考图1中的信息流程图描述对矿区破碎站的控制方法。所述控制方法包括:
检测步骤,在所述检测步骤中通过信息采集设备1检测破碎站的状态参数并以通信的方式将所述状态参数发送给破碎站的控制设备2;和
控制步骤,在所述控制步骤中所述控制设备2将接收到的状态参数以通信的方式发送给后台控制中心3,所述后台控制中心3基于接收到的状态参数得出对破碎站的控制指令并将所述控制指令发送给所述控制设备2,以基于所述控制指令对破碎站进行控制。
在所述检测步骤中还包括对破碎站进行定位从而得到所述破碎站的位置。
在所述控制步骤中,后台控制中心3能够远程控制破碎站停机及启动。
在控制步骤之后,所述控制设备2将控制指令、尤其是矿用卡车在所述破碎站内的受限制的行驶速度以及卸料点允许的卸料状态以通信的方式发送给破碎站附近的矿用卡车。
在控制步骤之后,所述控制设备2基于接收到的控制指令控制执行设备4进行相应的动作。
本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种修改、补充或采用替代方式,但不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
- 一种人机共同操控车辆的控制系统和控制方法
- 操控系统、紧固系统、压缩机设备和用于操控压缩机设备的方法
- 一种移动破碎站比例控制系统及控制方法
- 基于远程终端控制的无人值守站智能管理系统及操控方法