方向校正环、椎弓根钉植入辅助校正系统及辅助植入系统
文献发布时间:2023-06-19 09:23:00
技术领域
本发明属于医疗器械技术领域,具体涉及一种方向校正环、椎弓根钉植入辅助校正系统及辅助植入系统。
背景技术
目前椎弓根钉的植入过程为:用一根细的起导向作用的钢针在皮肤上扎一个孔,并沿最佳穿刺路径进针以使内固定针尽可能多地没入骨内而达到最稳定的固定(但是不能穿透骨髓),并经过C形臂在术中进行多体位透视,确认导针位置良好,即最大化平行、接近最佳穿刺路径,再将一颗中空的加压螺钉套在导针上,拧入脊椎,从而保证空心螺钉的固定路径与前面打入的导针方向完全一致。
导针的植入过程为:(1)手术医生将导针插入皮肤抵在脊椎顶端,通过“术中透视+多次调整导针方向”初步确定良好的导针方向;(2)将导针钻入脊椎;(3)再次进行多体位的术中透视来检验导针位置是否合适;(4)如果发现位置偏离较大,则需再次重复上述操作来打入第二根或更多根导针。
在实际手术中,由于医生对入针角度的判断经验不足,加之用钻将导针钻入这个过程本身就会由于手或电钻的少许移动使导针偏离原来设定的方向,因此在钻入过程中,可能需要不断纠正打入方向。
对于有经验的骨科医生,在打入导针的过程中,通常需要依靠手上力的感觉调整方向,才能保证高效率高精度地植入椎弓钉。但是对于绝大部分普通医生,往往手感把握不准,在术中无从调整导针的植入方向。鉴于这个问题,本项目拟设计一套系统,帮助普通医生实现精确高效的导针植入,减少射线暴露时间。
发明内容
本发明的目的是针对上述存在的问题和不足,提供一种方向校正环、椎弓根钉植入辅助校正系统及辅助植入系统,通过微型力传感器的检测,本发明的系统能帮助医生校正导针的植入方向且自动植入导针,提高手术效率和精度。
为达到上述目的,所采取的技术方案是:
一种方向校正环,包括校正环本体、微型力传感器以及控制器,微型力传感器数量为多个,且均布设置在校正环本体的内壁上,其用于感应穿过校正环本体的导针方向;控制器用于接收微型力传感器的感应信号,当导针方向与初始设计方向不一致时,微型力传感器受力并发出信号,控制器提示校正方向。
根据所述的一种方向校正环,所述微型力传感器的数量为四到八个。
根据所述的一种方向校正环,所述微型力传感器为光纤应变传感器。
一种椎弓根钉植入辅助校正系统,包括第一五自由度机械臂以及前面任一条所述的方向校正环,方向校正环固定连接在所述第一五自由度机械臂的动作执行端;其中,通过所述第一五自由度机械臂对所述方向校正环的方位进行调整,使所述方向校正环中部圆心与病患身体进针点之间的连线为椎弓根钉的进针初始设计方向。
根据所述的一种椎弓根钉植入辅助校正系统,所述第一五自由度机械臂包括第一级轴系统、第二级轴系统、第三级轴系统、第四级轴系统和第五级轴系统,第一级轴系统包括底座、旋转连接在底座上的第一旋转座;第二级轴系统包括第一转动桥臂,所述第一转动桥臂铰接在第一旋转座上;第三级轴系统包括第二转动桥臂,所述第二转动桥臂铰接在第一转动桥臂上;第四级轴系统包括设置在第二转动桥臂上的第一电机、与第一电机输出轴连接的第三转动桥臂,所述第三转动桥臂铰接在第二转动桥臂上;第五级轴系统包括设置在第三转动桥臂上的第二电机、与第二电机输出轴连接的第一旋转轴;所述方向校正环连接在所述第一旋转轴上。
根据所述的一种椎弓根钉植入辅助校正系统,所述第一五自由度机械臂为被动式五自由度机械臂,其前三个活动关节采用手动操作模式,其后两个活动关节采用手持器点动控制。
根据所述的一种椎弓根钉植入辅助校正系统,所述第一五自由度机械臂包括制动器,用于锁定第一五自由度机械臂的活动关节。
根据所述的一种椎弓根钉植入辅助校正系统,所述第一五自由度机械臂上设有定位方向校正环方位的定位装置。
根据所述的一种椎弓根钉植入辅助校正系统,所述方向校正环的下部还连接有定位导套,所述定位导套与所述方向校正环同轴设置,且所述定位导套的内孔用于引导椎弓根钉的导针植入。
一种椎弓根钉辅助植入系统,其与前面任一条所述的方向校正环配合自动植入导针,包括第二五自由度机械臂以及感应钻;感应钻固定连接在所述第二五自由度机械臂的动作执行端,包括导针、力矩传感器和导针驱动机构,所述导针设置为钝头钻,所述导针驱动机构根据所述力矩传感器的信号控制所述导针动作或停止;其中,所述导针的导向部分穿过所述方向校正环,所述第二五自由度机械臂根据所述控制器提示的校正方向控制所述导针的钻进方向。
采用上述技术方案,所取得的有益效果是:
1、采用本申请的方向校正环安装在体外设备上,不破坏原有手术方式的前提下,提高了手术的精度和安全性;
2、在椎弓根钉植入手术中,利用本申请的椎弓根钉植入的辅助校正系统,在导针植入过程中,当导针方向与初始设计方向一致时,方向校正环周圈力传感器基本不受压力或受力均衡;当导针方向与初始设计方向不一致时,校正环周圈力传感器受力不均,系统提示校正方向,在椎弓根钉植入手术中,通过微型力传感器的检测,该系统随时帮助医生校正导针的植入方向,提高手术效率和精度。
3、在椎弓根钉植入手术中,椎弓根钉辅助植入系统可以方便精确地将导针植入,使椎弓根钉植入手术可以不依赖医生的手感进行,且操作精度和安全性高。
附图说明
为了更清楚地说明本发明实施例的技术方案,下文中将对本发明实施例的附图进行简单介绍。其中,附图仅仅用于展示本发明的一些实施例,而非将本发明的全部实施例限制于此。
图1示出了根据本发明实施例的椎弓根钉植入辅助校正系统的结构示意图之一。
图2示出了根据本发明实施例的方向校正环和第一旋转轴连接的主视和俯视结构示意图。
图3示出了根据本发明实施例的方向校正环的俯视结构示意图之一。
图4示出了根据本发明实施例的方向校正环的俯视结构示意图之二。
图5示出了根据本发明实施例的导针在方向校正环内与初始设计方向不一致时的结构示意图。
图6示出了根据本发明实施例的椎弓根钉植入辅助校正系统的结构示意图之二。
图7示出了根据本发明实施例的椎弓根钉植入辅助植入系统的结构示意图。
图8示出了根据本发明实施例的椎弓根钉植入辅助校正系统的系统信号流程图。
图中序号:
100为方向校正环、101为校正环本体、102为微型力传感器、200为导针、300为第一五自由度机械臂、301为底座、302为第一旋转座、303为第一转动桥臂、304为第二转动桥臂、305为第三转动桥臂、306为第一旋转轴、400为第二五自由度机械臂、500为感应钻、600为定位导套。
具体实施方式
为了使得本发明的技术方案的目的、技术特征和技术效果更加清楚,下文中将结合本发明具体实施例的附图,对本发明实施例的示例方案进行清楚、完整地描述。显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于所描述的本发明的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
参见图2-图5,本实施例公开了一种方向校正环100,包括校正环本体101、微型力传感器102以及控制器,微型力传感器102数量为多个,且均布设置在校正环本体101的内壁上,其用于感应穿过校正环本体101的导针方向;控制器用于接收微型力传感器的感应信号,当导针方向与初始设计方向不一致时,微型力传感器102受力并发出信号,控制器提示校正方向。
微型力传感器102的数量为四到八个,本实施例中,如图3和图4所示,给出了校正环本体101内微型力传感器102的布局,可以根据校正环本体101内微型力传感器102的布局设定校正提示方式,安装时微型力传感器102的安装方位在校正环本体101上需要显著标注,在使用过程中,其标注作为方向校正环100的控制器提示校正方向的方位基准。比如,向第一或第二微型力传感器方向偏转等。
本实施例中,优选的,微型力传感器102为OSP-A或OSP-FP型光纤应变传感器。
方向校正环100的校正原理如图5所示,为方便图示,图中方向校正环100的中孔相对有所放大,方向校正环中部圆心与病患身体接触点之间的连线既是进针的初始设计方向,也约束着导针200的运动。当导针200方向与初始设计方向一致时,方向校正环100的四个(最多八个)微型力传感器102基本不受力或受力均衡,当导针200方向与初始方向不一致时,方向校正环100的四个微型力传感器受力不均,控制器提示校正方向。
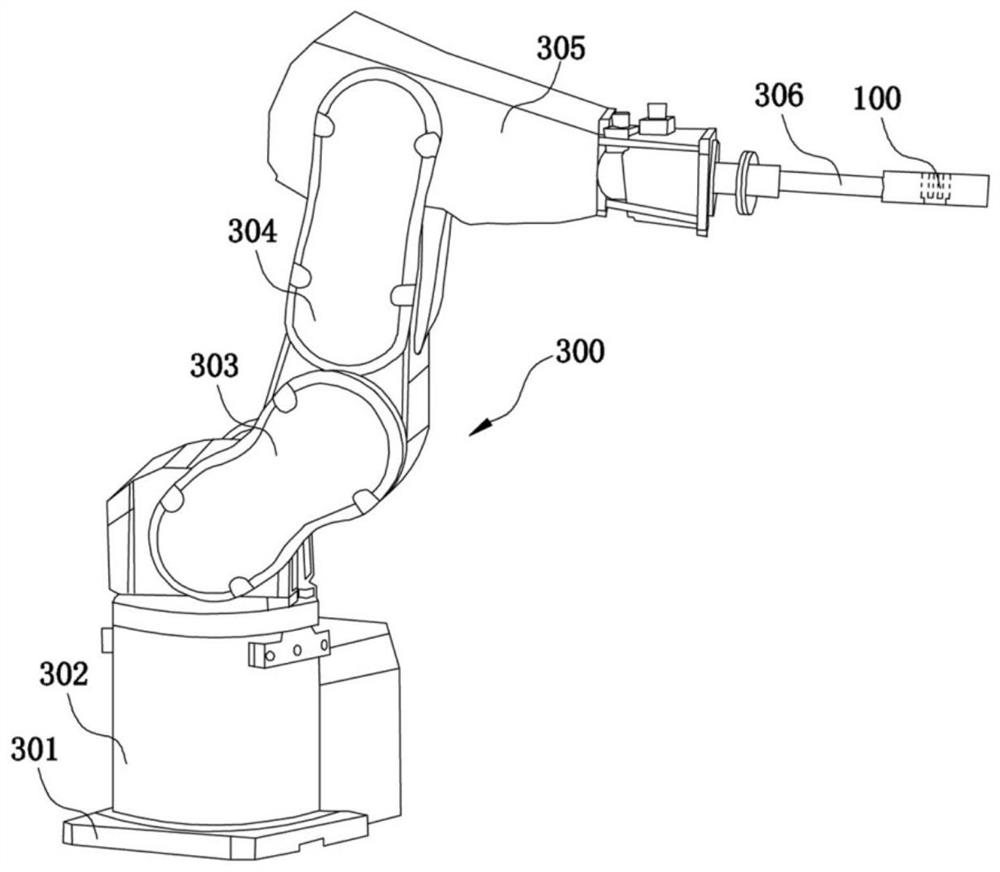
如图1和图6所示,本实施例还公开了一种椎弓根钉植入辅助校正系统,包括第一五自由度机械臂300以及前面描述的方向校正环100,方向校正环100固定连接在第一五自由度机械臂300的动作执行端末端;其中,通过第一五自由度机械臂300对方向校正环100的方位进行调整,使方向校正环中部圆心与病患身体进针点之间的连线为椎弓根钉的进针初始设计方向。
第一五自由度机械臂300包括第一级轴系统、第二级轴系统、第三级轴系统、第四级轴系统和第五级轴系统,第一级轴系统包括底座301、旋转连接在底座301上的第一旋转座302;第二级轴系统包括第一转动桥臂303,第一转动桥臂302铰接在第一旋转座301上;第三级轴系统包括第二转动桥臂304,第二转动桥臂304铰接在第一转动桥臂303上;第四级轴系统包括设置在第二转动桥臂304上的第一电机、与第一电机输出轴连接的第三转动桥臂305,第三转动桥臂305铰接在第二转动桥臂304上;第五级轴系统包括设置在第三转动桥臂305上的第二电机、与第二电机输出轴连接的第一旋转轴306;方向校正环100连接在第一旋转轴306上。
本实施例中,第一五自由度机械臂300既可以设置为部分被动式,也可以设置为主动式,可以使用scara构型的机械臂。
本实施例中,当第一五自由度机械臂300设置为主动式五自由度机械臂时,一种可能的第一五自由度机械臂的结构如下所示:
第一五自由度机械臂300包括第一级轴系统、第二级轴系统、第三级轴系统、第四级轴系统和第五级轴系统,第一级轴系统包括第一伺服电机、与第一伺服电机输出轴连接的第一旋转座302;第二级轴系统包括设置在第一旋转座302内的第二伺服电机、与第二伺服电机输出轴连接的第一转动桥臂303,第一转动桥臂303铰接在第一旋转座302上;第三级轴系统包括设置在第一转动桥臂303内的第三伺服电机、与第三伺服电机输出轴连接的第二转动桥臂304,第二转动桥臂304铰接在第一转动桥臂303上;第四级轴系统包括设置在第二转动桥臂304上的第四伺服电机、与第四伺服电机输出轴连接的第三转动桥臂305,第三转动桥臂305铰接在第二转动桥臂304上;第五级轴系统包括设置在第三转动桥臂305上的第五伺服电机、与第五伺服电机输出轴连接的第一旋转轴306;方向校正环连接在第一旋转轴306上。
本实施例中,当第一五自由度机械臂300设置为被动式五自由度机械臂,一种可能的结构为:第一五自由度机械臂300的五个关节处分别设置制动器,用于锁定第一五自由度机械臂的活动关节,且只在第一五自由度机械臂300的后两个关节位置设置第一电机和第二电机,其控制方法为:其前三个活动关节采用手动操作模式,其后两个活动关节采用手持器点动控制。医生通过操作手持器对第一五自由度机械臂300进行控制的具体操作方法如下:
首先手术医生牵引前三个关节,在导航系统的导引下使腕点到预定位置,给前三个关节断电使其固定在该位置;然后医生通过手持器点动控制第一五自由度机械臂的第四和第五关节(第四、五关节为主动关节),在导航系统的导引下使其到预定姿态,然后给后两个关节断电使其固定在该姿态。至此,第一五自由度机械臂辅助操作平台搭建完成。如图8所示,第一五自由度机械臂300的制动或点动控制信号由医生通过手持器向第一五自由度机械臂控制器发送;方向校正环100上光纤应变传感器的信号通过信号解调器和方向校正环控制器(微型电脑)传送给手持器给医生操作提示。
医生在导航系统的引导下将方向校正环100放在理想位置并锁定后,再通过向方向校正环100的中孔赛入导针,如图1和图5所示,方向校正环中部圆心与病患身体接触点之间的连线即是进针的初始设计方向。
另外,如图6所示,方向校正环100的下部还连接有定位导套600,定位导套600与方向校正环100同轴设置,且定位导套600的内孔用于引导椎弓根钉的导针植入。即如果医生对某次次方向校正环100的定位满意,可加长校正环100,使其成为定位导套,其功能则类似spine assist,直接引导医生植入导针。
综上,医生在使用椎弓根钉植入辅助校正系统时,可以方便地操作第一五自由度机械臂300,在导航系统(比如X射线图像)引导下,将第一五自由度机械臂300末端的方向校正环100摆放到进针方向的上方,使方向校正环中部圆心和患者身上的植入点之间的直线为医生的初始设计方向,并方便通过制动器锁定方向。至此,方向校正环中部圆心和患者身上的植入点之间的直线便是医生的初始设计方向。在导针植入过程中,当导针方向与初始设计方向一致时,方向校正环100周圈微型力传感器102基本不受压力或受力均衡;当导针方向与初始设计方向不一致时,方向校正环100周圈微型力传感器102受力不均,方向校正环100的控制器提示校正方向。
如果手术过程中,医生发现方向校正环100所定方向并不准确,也可以随时解锁第一五自由度机械臂300,重新调整方向校正环100的位置。
另外,为提高准确性和效率,也可以在第一五自由度机械臂300上设置定位方向校正环100方位的定位装置,定位装置可以定位方向校正环100中部圆心与病患身体进针点之间连线的方位,通过系统标定实时提示第一五自由度机械臂300末端方向校正环100中部圆心与病患身体进针点之间连线的方位与设计进针方向之间的相对关系。
如图7所示,本实施例还公开了一种椎弓根钉辅助植入系统,其与前面描述的方向校正环100及椎弓根钉植入辅助校正系统配合自动植入导针200,包括第二五自由度机械臂400以及感应钻500;感应钻500固定连接在第二五自由度机械臂400的动作执行端,包括导针200、力矩传感器和导针驱动机构,导针设置为钝头钻,只能提供相对小的钻进力,导针驱动机构根据力矩传感器的信号控制导针200动作或停止;其中,导针200的导向部分穿过方向校正环100,第二五自由度机械臂400根据方向校正环控制器的提示的校正方向从而控制导针200的钻进方向。
医生在植入导针时,可以采用以下三种植入方式以与椎弓根钉植入辅助校正系统进行配合:
第一,将导针200塞入调整好的方向校正环100后,医生需要手动将导针200钻入患者脊椎,在钻入过程中,一方面医生需要根据方向校正环100控制器的提示手动调整钻入方向,另一方面医生还需要凭手感确认是否钻入皮质骨,并及时停止钻进;
第二,将导针200塞入调整好的方向校正环100后,医生采用感应钻500将导针200钻入患者脊椎,在钻入过程中,一方面医生需要根据方向校正环100控制器的提示手动调整钻入方向,另一方面医生不需要凭手感确认是否钻入皮质骨,而是感应钻500根据力矩传感器感应到的力矩,感应钻500内的控制器控制导针200及时停止钻进;
第三,将导针200塞入调整好的方向校正环100后,采用椎弓根钉辅助植入系统上的感应钻500将导针钻入患者脊椎,在钻入过程中,一方面第二五自由度机械臂400根据方向校正环100的控制器的提示自动调整钻入方向,另一方面医生不需要凭手感确认是否钻入皮质骨,而是椎弓根钉辅助植入系统中的感应钻500根据力矩传感器感应到的力矩,感应钻500内的控制器控制导针200及时停止钻进。
除非另作定义,此处使用的技术术语或者科学术语应当为本发明所属领域内具有一般技能的人士所理解的通常意义。本发明专利申请说明书以及权利要求书中使用的“一”、“二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。同样,“一个”或者“一”等类似词语也不必然表示数量限制。“包括”或者“包含”等类似的词语意指出现该词前面的元件或物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
上文中参照优选的实施例详细描述了本发明的示范性实施方式,然而本领域技术人员可理解的是,在不背离本发明理念的前提下,可以对上述具体实施例做出多种变型和改型,且可以对本发明提出的各技术特征、结构进行多种组合,而不超出本发明的保护范围,本发明的保护范围由所附的权利要求确定。
- 方向校正环、椎弓根钉植入辅助校正系统及辅助植入系统
- 方向校正环、椎弓根钉植入辅助校正系统及辅助植入系统