一种物料码垛输送装置、应用该装置的码垛机及码垛方法
文献发布时间:2023-06-19 09:27:35
技术领域
本发明涉及一种药物纸盒包装领域,具体涉及一种将药物纸盒装箱后进行码垛的物料码垛输送装置、应用该装置的码垛机及码垛方法。
背景技术
一般纸盒(比如药盒或者其他小型纸盒)经捆扎打包后装入纸箱内,目前纸盒的捆扎由纸盒捆扎机完成,之后就由人工进行装箱。为了能实现自动化装盒,申请人设计一种全自动纸盒装箱设备。纸盒经全自动纸盒装箱设备的装箱后,就需要进行码垛,然后通过叉车运走。现有普通的码垛方式就是通过一个输送机构将物料横向输出来(全自动纸盒装箱设备的出料方向就是横向),然后通过码垛机械手将纸箱进行码垛,然而这种方式只能将纸箱码垛到输送机构的前端。如图 所示,如果在输送机构的前端布置左右两个码垛空间,那么码垛机械手在左边码垛空间垛满的情况下无法过渡到右边的码垛空间(左边码垛空间的箱子会干涉码垛机械手过渡到右边码垛空间),因此只能等左边码垛空间的纸箱被叉车运走后才能继续,很显然,这种方式是不连续的,直接影响效率,如果全自动纸盒装箱设备设计成连续出料,那么这种码垛方式就无法进行正常匹配。如果在输送机构的前端布置前后两个码垛空间,那么叉车需要从前侧运走前侧码垛空间的纸箱,从后侧运走后侧码垛空间的纸箱,对于叉车来说,这样方式是很不方便的,而且需要在后侧腾出很大的空间给叉车通过与调整,对于寸土寸金的厂房来说,这种方式显然是不合理的。
发明内容
鉴于现有技术存在的不足,本发明创新提供了一种可以布置左右两个互不干涉的码垛空间的物料码垛输送装置、应用该装置的码垛机及码垛方法。
这种物料码垛输送装置,包括有进料横向输送机构,其特征在于:所述进料横向输送机构的一侧设有过渡横向输送机构,所述过渡横向输送机构与进料横向输送机构之间输送衔接,所述过渡横向输送机构的一侧设有出料纵向输送机构,所述出料纵向输送机构与过渡横向输送机构之间输送衔接,所述出料纵向输送机构的一侧与进料横向输送机构之间具有第一码垛空间,所述出料纵向输送机构的另一侧具有第二码垛空间。
所述过渡横向输送机构与进料横向输送机构之间通过第一输送带机构实现输送衔接,所述第一输送带机构包括有第一输送带,所述进料横向输送机构包括有多个进料输送辊,所述过渡横向输送机构包括有多个过渡输送辊,所述第一输送带从两个进料输送辊之间延伸到两个过渡输送辊之间,所述第一输送带机构与驱动第一输送带机构上下升降的第一升降动力源传动连接。
所述过渡横向输送机构与出料纵向输送机构之间通过第二输送带机构实现输送衔接,所述第二输送带机构包括有第二输送带,所述过渡横向输送机构包括有多个过渡输送辊,所述第二输送带位于两个过渡输送辊之间,所述第二输送带机构与驱动第二输送带机构上下升降的第二升降动力源传动连接。
这种物料码垛机,包括有码垛机械手,其特征在于:所述码垛机械手的前方设有如权利要求1-3任一项所述的物料码垛输送装置,所述码垛机械手可将出料纵向输送机构上的物料移放到第一码垛空间与第二码垛空间。
所述码垛机械手安装在横向滑座上,所述横向滑座滑动设置在横向导轨上,所述横向滑座与驱动横向滑座移动的横向动力源传动连接。
所述吸具为海绵真空吸具。
这种物料码垛方法,其特征在于包括以下步骤:S1、将物料放置在进料横向输送机构上,由进料横向输送机构对物料进行横向输送;S2、进料横向输送机构一侧设有过渡横向输送机构,将物料从进料横向输送机构输送到过渡横向输送机构,由过渡横向输送机构对物料进行横向输送;S3、在过渡横向输送机构的一侧设有出料纵向输送机构,将物料从过渡横向输送机构输送到出料纵向输送机构,由出料纵向输送机构对物料进行纵向输送;s4、出料纵向输送机构的一侧与进料横向输送机构之间具有第一码垛空间,出料纵向输送机构的另一侧具有第二码垛空间,码垛机械手将出料纵向输送机构上的物料移放到第一码垛空间与第二码垛空间。
物料通过机械推送或者机械传送的方式从进料横向输送机构输送到过渡横向输送机构,物料通过机械推送或者机械传送的方式从过渡横向输送机构输送到出料纵向输送机构。
按照本发明提供的一种物料码垛输送装置能将纸箱的横向输送转变成纵向输送,从可以获得左右两个互不干涉的码垛空间,而应用该装置的码垛机能将纸箱堆放在这两个码垛空间。
附图说明
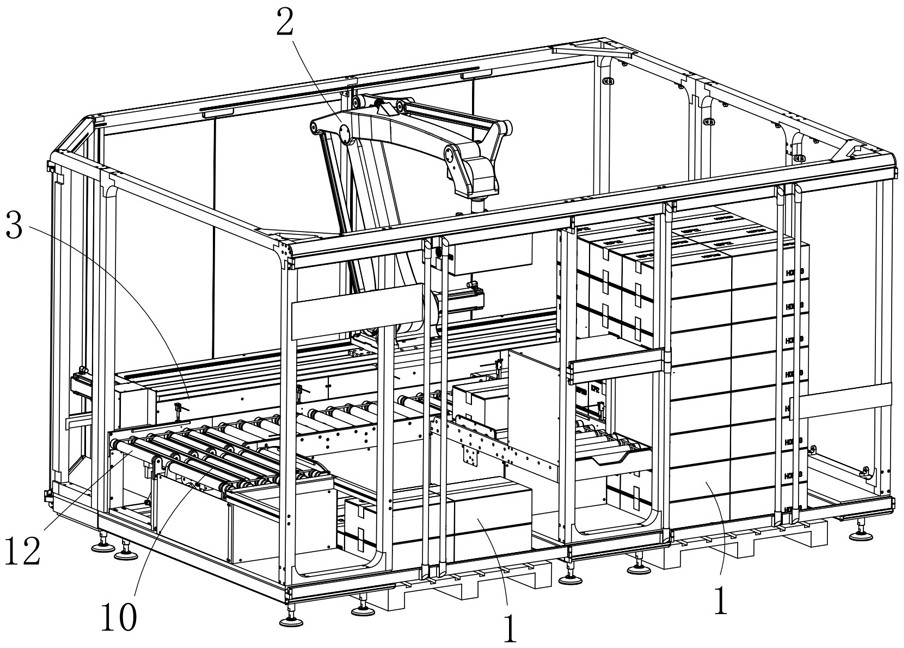
图1为码垛机的立体图;
图2为码垛机的俯视图;
图3为物料码垛输送装置的俯视图;
图4为码垛机械手的结构示意图;
图5为码垛机械手的主视图;
图6为码垛机械手的平行原理图。
具体实施方式
如图1所示,这种物料码垛机包括有码垛机械手2与物料码垛输送装置,物料码垛输送装置位于码垛机械手2的前方,如图2所示,纸箱1通过物料码垛输送装置输送过来,码垛机械手2就将纸箱1移放到第一码垛空间7与第二码垛空间8,纸箱在第一码垛空间7完成码垛后,码垛机械手2就来到第二码垛空间8继续码垛,而第一码垛空间7内的纸箱就通过叉车运走。
如上面所述,物料码垛机具有两个互不干涩的第一码垛空间7与第二码垛空间8,为了形成这样空间布局,本发明提高了一种独特的物料码垛输送装置。如图2与3所示,这种物料码垛输送装置包括有进料横向输送机构10,进料横向输送机构10的一侧设有过渡横向输送机构12,过渡横向输送机构12与进料横向输送机构10之间输送衔接,而在过渡横向输送机构12的一侧设有出料纵向输送机构14,该出料纵向输送机构14与过渡横向输送机构12之间输送衔接,出料纵向输送机构14的一侧与进料横向输送机构10之间具有第一码垛空间7,出料纵向输送机构14的另一侧具有第二码垛空间8。
通过上述结构的物料码垛输送装置,纸箱1从横向输送变成纵向输送,最终来到出料纵向输送机构14上,而出料纵向输送机构14左边具有第一码垛空间7,右边具有第二码垛空间8,这样码垛机械手2就可以将出料纵向输送机构14上的纸箱A先码垛在第一码垛空间7,第一码垛空间7堆满后,码垛机械手2又将出料纵向输送机构14上的纸箱1码垛在第二码垛空间8,由于第一码垛空间7与第二码垛空间8是分布在出料点的两边,因此码垛机械手2从一个码垛空间过渡到另一个码垛空间不会发生干涉,码垛机械手2可以实现连续工作。同时,由于这样的码垛空间布局,纸盒装箱设备的出料方向与物料码垛机的两个码垛空间就在同一条横线上,整机只是在横向上加长,这完全符合整机设计规范,而叉车只需要在物料码垛机的前侧操作即可,无需绕到背后,大大方便了叉车运输。
如上面所述,过渡横向输送机构12与进料横向输送机构10之间输送衔接,即进料横向输送机构10上的纸箱1可以输送到过渡横向输送机构12上。纸箱1从进料横向输送机构10输送到过渡横向输送机构12上的方式比较多:比如通过气缸驱动推板将纸箱1从进料横向输送机构10推送到过渡横向输送机构12上;比如在上方设置输送带,输送带上沿带长方向等分设有多个推块,输送带沿纵向传动,纸箱来到推块前,就通过输送带的传动,推块就能推着纸箱1来到过渡横向输送机构12上;比如设置机械手,将纸箱1从进料横向输送机构10上移送到过渡横向输送机构12上。
不过上面几种方式结构不是很紧凑,会占用较大的空间,而且成本较高。为此,本发明还提供了一种通过第一输送带机构11实现输送衔接的方式,如图3所示,第一输送带机构11包括有第一输送带110,而进料横向输送机构10包括有多个进料输送辊100,过渡横向输送机构12包括有多个过渡输送辊120,第一输送带110就从两个进料输送辊100之间延伸到两个过渡输送辊120之间,第一输送带机构11与驱动第一输送带机构11上下升降的第一升降动力源传动连接。当纸箱1进入到进料横向输送机构10上后,第一升降动力源驱动第一输送带机构11上升,这样第一输送带110就托起纸箱1,同时第一输送带110将纸箱输送到过渡横向输送机构12的上方,然后第一升降动力源驱动第一输送带机构11下降,这样纸箱1就至于过渡横向输送机构12的过渡输送辊120上,过渡横向输送机构12通过其过渡输送辊120将纸箱1往前输送。
过渡横向输送机构12与出料纵向输送机构14之间输送衔接,即过渡横向输送机构12上的纸箱1可以输送到出料纵向输送机构14上。纸箱1从过渡横向输送机构12输送到出料纵向输送机构14上的方式也比较多,其跟从进料横向输送机构10输送到过渡横向输送机构12上的方式相同,这里不再重复描述。
也是基于同样的原因,过渡横向输送机构12与出料纵向输送机构14之间通过第二输送带机构13实现输送衔接,第二输送带机构13包括有第二输送带130,过渡横向输送机构12包括有多个过渡输送辊120,第二输送带130位于两个过渡输送辊120之间,第二输送带机构13与驱动第二输送带机构13上下升降的第二升降动力源传动连接。当纸箱1进入到过渡横向输送机构12的末端,第二升降动力源驱动第二输送带机构13上升,这样第二输送带130就托起纸箱1,同时第二输送带130将纸箱1输送到出料纵向输送机构14的前端,然后第二升降动力源驱动第二输送带机构13下降,这样纸箱1就至于出料纵向输送机构14上,出料纵向输送机构14将纸箱1进行纵向输送。
如上面所述,纸箱通过码垛机械手2码垛起来,为了使码垛机械手2能够具有较大的移动范围,如图4所示,码垛机械手2安装在横向滑座3上(码垛机械手2为普通机械手,比如库卡关节型机器人),横向滑座3滑动设置在横向导轨4上,横向滑座3与驱动横向滑座3移动的横向动力源5传动连接。通过横向动力源5的驱动,横向滑座3载着码垛机械手2横向移动,码垛机械手2才能在第一码垛空间7与第二码垛空间8之间移动。当然,也可以采用动作范围较大的机械手,这样就可以不用安装横向滑座3与横向导轨4。
如图4与图5所示,这种码垛机械手2包有机座21、大臂22、小臂23以及吸具20,大臂22的下端铰接在机座21上并与第一动力源220传动连接,大臂22的上端与小臂23铰接,小臂23的一端与吸具座24铰接,吸具20连接在吸具座24上,小臂23的另一端与传动连杆29的一端铰接,所述传动连杆29的另一端与传动臂290铰接,传动臂29铰接在机座21上并与第二动力源230传动连接。第一动力源220驱动大臂22绕其铰接点转动,第二动力源230驱动与传动臂290转动,传动臂290通过传动连杆29拉动小臂23绕其铰接点转动,通过这种结构传动,吸具20就能实现上下前后移动,从而吸取纸箱1,再通过码垛机械手2在横向导轨4上移动,码垛机械手2就能在第一码垛空间7与第二码垛空间8进行码垛。
另外,为了使吸具座24始终保持水平,如图5所示,本发明在保持机座21上连接有下连接臂210,下连接臂210与下平行连杆28的一端铰接,下平行连杆28的另一端与三角连接件25的第一角铰接,三角连接件25的第二角铰接在小臂23上,三角连接件25的第三角与上平行连杆26的一端铰接,上平行连杆26的另一端与吸具座24铰接。如图6所示,吸具座24与小臂23的铰接点到上平行连杆26与吸具座24的铰接点的距离为K1;上平行连杆26与三角连接件25的铰接点到三角连接件25与小臂23的铰接点的距离为K2;上平行连杆26与吸具座24的铰接点到上平行连杆26与三角连接件25的铰接点的距离为K3;吸具座24与小臂23的铰接点到三角连接件25与小臂23的铰接点的距离为K4;三角连接件25与小臂23的铰接点到大臂22与机座21的铰接点的距离为K5;三角连接件25与下平行连杆28的铰接点到下平行连杆28与下连接臂210的铰接点的距离为K6;三角连接件25与小臂23的铰接点到三角连接件25与下平行连杆28的铰接点的距离为K7;大臂22与机座21的铰接点到下连接臂210与下平行连杆28的铰接点的距离K8。只要满足K1=K2 ,K3=K4 ,K5=K6 ,K7=K8,就能保证吸具座24与吸具20始终保持平行。
这里值得一提的是,码垛机械手2的吸具20为海绵真空吸具。海绵真空吸具能更稳定地吸住纸箱1,防止纸箱1掉落。
基于这种物料码垛机,本发明提供了一种物料码垛方法,包括以下步骤:S1、将物料放置在进料横向输送机构10上,由进料横向输送机构10对物料进行横向输送;S2、进料横向输送机构10一侧设有过渡横向输送机构12,将物料从进料横向输送机构10输送到过渡横向输送机构12,由过渡横向输送机构12对物料进行横向输送;S3、在过渡横向输送机构12的一侧设有出料纵向输送机构14,将物料从过渡横向输送机构12输送到出料纵向输送机构14,由出料纵向输送机构14对物料进行纵向输送;s4、出料纵向输送机构14的一侧与进料横向输送机构10之间具有第一码垛空间7,出料纵向输送机构14的另一侧具有第二码垛空间8,码垛机械手7将出料纵向输送机构14上的物料移放到第一码垛空间7与第二码垛空间8。通过上述码垛方法,纸箱1便能在第一码垛空间7与第二码垛空间8码垛起来,并且码垛机械手2能实现连续工作。
物料从进料横向输送机构10输送到过渡横向输送机构12的方法很多,可以通过机械推送或者机械传送的方式从进料横向输送机构10输送到过渡横向输送机构12,两者方法都能实现,具体见上面所述的输送衔接方式。物料从过渡横向输送机构12输送到出料纵向输送机构14的方法也很多,可以通过机械推送或者机械传送的方式从过渡横向输送机构12输送到出料纵向输送机构14,两者方法都能实现,具体见上面所述的衔接方式。