一种波导路径生成方法及装置
文献发布时间:2023-06-19 09:29:07
技术领域
本发明涉及网络空间安全技术领域,特别是一种波导路径生成方法及装置。
背景技术
随着基于模型定义技术的日趋成熟,应用范围不断推广。目前卫星载荷设计师利用三维模型来实现整个卫星载荷舱的机械设计。波导作为载荷舱中重要的通信手段,在整个有效载荷系统中承担着重要的任务。而且对于高通量的通信卫星,承担通信任务的波导数量可以达到数千根甚至上万根。单根波导组件连接两台设备的两端接口,波导的连接不是简单的直线连接,而是要通过增加控制点对波导的走向进行控制,尤其是波导数量呈几何倍数增长的时候。波导与波导之间、波导与设备之间、波导与总装结构之间都需要进行避让。此时波导的走向及控制点的设计就显得尤为重要了。波导通过支架与载荷舱舱板连接固定,根据波导的长度不同,支架的数量从0到几十不等,沿着波导的设计走向进行添加,用以将波导组件与载荷舱板固定。
设备、控制点及支架的数量及位置由设计师完成设计并形成三维模型,在设计波导时,由设计师依据对应的单机连接关系,选定需要连接的单机,根据不同频段波导的弯曲规则,形成简单的走向路径,再根据实际情况对走向进行调整,满足干涉性要求。
然而现有的方式,由于设计师技术能力不一而设计出的路径不一致,从而影响卫星载荷舱的连接方式,进一步影响载荷舱板稳固性。
发明内容
本发明解决的技术问题是:克服现有技术的不足,提供了一种波导路径生成方法及装置。
为了解决上述技术问题,本发明提供了一种波导路径生成方法,包括:
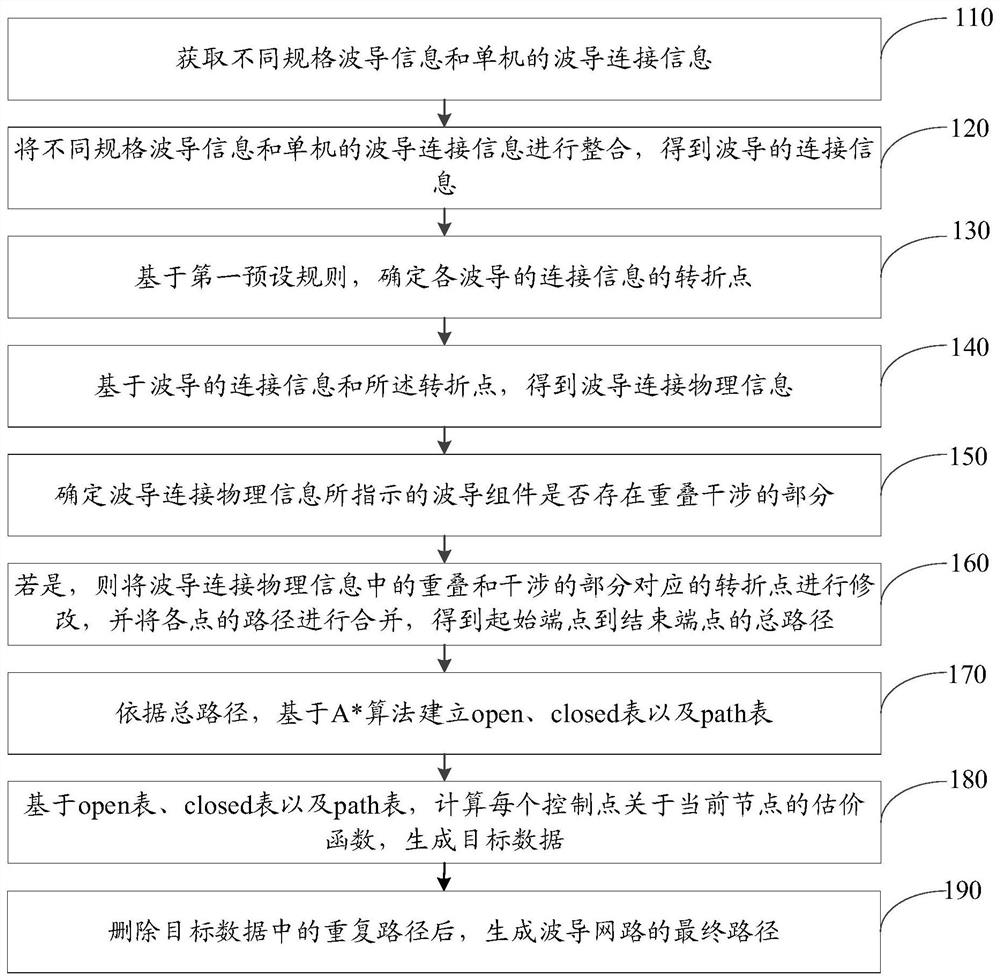
获取不同规格波导信息和单机的波导连接信息;
将所述不同规格波导信息和所述单机的波导连接信息进行整合,得到波导的连接信息;
基于第一预设规则,确定各所述波导的连接信息的转折点;
基于所述波导的连接信息和所述转折点,得到波导连接物理信息;
确定所述波导连接物理信息所指示的波导组件是否存在重叠干涉的部分;
若是,则将所述波导连接物理信息中的重叠和干涉的部分对应的转折点进行修改,并将各点的路径进行合并,得到起始端点到结束端点的总路径;
依据总路径,基于A*算法建立open、closed表以及path表;
基于所述open表、closed表以及path表,计算每个控制点关于当前节点的估价函数,生成目标数据;
删除所述目标数据中的重复路径后,生成波导网路的最终路径。
可选地,所述第一预设规则为转折点的初始路径的所有曲线正置正交,且段数最少。
可选地,所述确定所述波导连接物理信息所指示的波导组件是否存在重叠干涉的部分,包括:
对波导连接物理信息中的各起始端点、结束端点以及转折点的坐标位置基于以下方式进行对比:
δn=(Xk-Xn,Yk-Yn,Zk-Zn);
其中,Xk、Xn、Yk、Yn、Zk以及Zn为起始端点、结束端点或者转折点的坐标位置;
在所述δn为(0,0,0)时,指示所述波导连接物理信息所指示的波导组件存在重叠干涉的部分;
在所述δn≠(0,0,0)时,指示所述波导连接物理信息所指示的波导组件不存在重叠干涉的部分。
可选地,所述若是,则将所述波导连接物理信息中的重叠和干涉的部分对应的转折点进行修改,并将各点的路径进行合并,得到起始端点到结束端点的总路径,包括:
在所述δn为(0,0,0)时,则将所述波导连接物理信息中的重叠和干涉的部分对应的转折点进行修改;
将各点的路径进行合并,得到起始端点到结束端点的总路径。
可选地,所述依据总路径,基于A*算法建立open、closed表以及path表,包括:
选取起始端点为当前节点,创建open表,用于记录波导过当前节点后下一个可经过的控制点;其中,所述open表中的数据,两个相邻的转折点的坐标值至少有一个保持一致;
创建pool表,用于记录所有曾考察过的可经过的控制点;
创建path表,用于依次记录波导路径上的控制点信息。
可选地,所述基于所述open表、closed表以及path表,计算每个控制点关于当前节点的估价函数,生成目标数据,包括:
在所述波导连接物理信息中查找与当前节点实际距离小于预设距离的控制点;
将控制点的位置信息添加至open表和pool表;
计算open表中每个控制点n关于当前节点m的估价函数F(n)=Gmn+Hn;其中,F(n)用于表征从m经过控制点n到结束端的总距离,Gmn为每个控制点n和当前节点m之间的距离,Hn为每个控制点n到终点的距离;
根据估价函数生成目标数据。
为了解决上述技术问题,本发明还提供了一种波导路径生成装置,包括:
获取模块,用于获取不同规格波导信息和单机的波导连接信息;
整合模块,用于将所述不同规格波导信息和所述单机的波导连接信息进行整合,得到波导的连接信息;
第一确定模块,用于基于第一预设规则,确定各所述波导的连接信息的转折点;
第二确定模块,用于基于所述波导的连接信息和所述转折点,得到波导连接物理信息;
第三确定模块,用于确定所述波导连接物理信息所指示的波导组件是否存在重叠干涉的部分;
修改模块,用于若是,则将所述波导连接物理信息中的重叠和干涉的部分对应的转折点进行修改,并将各点的路径进行合并,得到起始端点到结束端点的总路径;
建立模块,用于依据总路径,基于A*算法建立open、closed表以及path表;
计算模块,用于基于所述open表、closed表以及path表,计算每个控制点关于当前节点的估价函数,生成目标数据;
生成模块,用于删除所述目标数据中的重复路径后,生成波导网路的最终路径。
可选地,所述第一预设规则为转折点的初始路径的所有曲线正置正交,且段数最少。
可选地,所述第三确定模块包括:
对比子模块,用于对波导连接物理信息中的各起始端点、结束端点以及转折点的坐标位置基于以下方式进行对比:
δn=(Xk-Xn,Yk-Yn,Zk-Zn);
其中,Xk、Xn、Yk、Yn、Zk以及Zn为起始端点、结束端点或者转折点的坐标位置;
第一指示子模块,用于在所述δn为(0,0,0)时,指示所述波导连接物理信息所指示的波导组件存在重叠干涉的部分;
第二指示子模块,用于在所述δn≠(0,0,0)时,指示所述波导连接物理信息所指示的波导组件不存在重叠干涉的部分。
可选地,所述修改模块包括:
修改子模块,用于在所述δn为(0,0,0)时,则将所述波导连接物理信息中的重叠和干涉的部分对应的转折点进行修改;
确定子模块,用于将各点的路径进行合并,得到起始端点到结束端点的总路径。
可选地,所述建立模块包括:
选取子模块,用于选取起始端点为当前节点,创建open表,用于记录波导过当前节点后下一个可经过的控制点;其中,所述open表中的数据,两个相邻的转折点的坐标值至少有一个保持一致;
第一创建子模块,用于创建pool表,用于记录所有曾考察过的可经过的控制点;
第二创建子模块,用于创建path表,用于依次记录波导路径上的控制点信息。
可选地,所述生成模块包括:
查找子模块,用于在所述波导连接物理信息中查找与当前节点实际距离小于预设距离的控制点;
添加子模块,用于将控制点的位置信息添加至open表和pool表;
计算子模块,用于计算open表中每个控制点n关于当前节点m的估价函数F(n)=Gmn+Hn;其中,F(n)用于表征从m经过控制点n到结束端的总距离,Gmn为每个控制点n和当前节点m之间的距离,Hn为每个控制点n到终点的距离;
生成子模块,用于根据估价函数生成目标数据。
本发明与现有技术相比的优点在于:
本发明实施例提供的方案,通过获取不同规格波导信息和单机的波导连接信息;将不同规格波导信息和单机的波导连接信息进行整合,得到波导的连接信息;基于第一预设规则,确定各波导的连接信息的转折点;基于波导的连接信息和转折点,得到波导连接物理信息;确定波导连接物理信息所指示的波导组件是否存在重叠干涉的部分;若是,则将波导连接物理信息中的重叠和干涉的部分对应的转折点进行修改,并将各点的路径进行合并,得到起始端点到结束端点的总路径;依据总路径,基于A*算法建立open、closed表以及path表;基于open表、closed表以及path表,计算每个控制点关于当前节点的估价函数,生成目标数据;删除目标数据中的重复路径后,生成波导网路的最终路径。设备、控制点及支架的数量及位置由设计师完成设计并形成三维模型,在设计波导时,本发明对波导和对应的单机连接时,无需设计师根据对应的单机连接关系,选定需要连接的单机,根据不同频段波导的弯曲规则,形成简单的走向路径,再根据实际情况对走向进行调整,满足干涉性要求。直接自动通过不同规格波导信息和单机的波导连接信息,构建波导的连接信息,基于转折点,得到波导连接物理信息,通过一系列的处理,最终得到波导网路的最终路径,并基于最终路径,完成有效的波导路径,从而解决现有的由于设计师技术能力不一而设计出的路径不一致的问题。
附图说明
图1为本发明实施例提供的一种波导路径生成方法的步骤流程图;
图2是本发明实施例提供的东方红CAST2000平台的舱板式结构示意图;
图3是本发明实施例提供的东方红三号、东方红四号平台的壁板形式结构示意图;
图4是本发明实施例提供的一种波导路径生成装置的结构框图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
参照图1,示出了本发明实施例提供的一种波导路径生成方法的步骤流程图,如图1所示,该方法具体可以包括如下步骤:
步骤110:获取不同规格波导信息和单机的波导连接信息。
首先将整个载荷舱需要波导连接的单机接口信息、波导代号及类型,法兰的形式储存进附表中,这些信息已经基于模型定义完成,模型中的信息与表中的一致。将这些信息分类存储在不同的表格中,表按照单机的所在舱板位置进行命名,以东方红四号平台的形式来命名如“Ept_11”、“Ept_12”等列表中。波导规格信息如表1所示。
表1不同规格波导信息
步骤120:将不同规格波导信息和单机的波导连接信息进行整合,得到波导的连接信息。
将单机的波导连接信息与波导规格信息进行整合,形成波导的连接信息列表,如表2所示。
表2波导连接信息
步骤130:基于第一预设规则,确定各波导的连接信息的转折点。
第一预设规则为:转折点的初始路径的所有曲线正置正交,且段数最少。
步骤140:基于波导的连接信息和转折点,得到波导连接物理信息。
综合表1和表2所有的信息,波导的设计基础已经全部具备。波导的类型决定了波导的内腔截面积、厚度及转弯半径等等。波导的始终端决定了波导的连接。在设置波导走向的过程中可以设置穿舱点或者不同舱板上的转折点。判断波导从始端到终端是否经过穿舱点或者转折点,如果经过就将这些点依次作为波导走向设计过程中的转折点,此时连接两个相邻的波导路径在同一舱板上且不被其他舱板阻隔。由此将表2扩展为表3,增加了转折点的三维坐标,从而将三维问题转化为二维问题。
表3波导连接物理信息(增加转折点)
步骤150:确定波导连接物理信息所指示的波导组件是否存在重叠干涉的部分。
在本发明的一种具体实现方式中,上述步骤150可以包括:
子步骤A1:对波导连接物理信息中的各起始端点、结束端点以及转折点的坐标位置基于以下方式进行对比:
δn=(Xk-Xn,Yk-Yn,Zk-Zn)。
其中,Xk、Xn、Yk、Yn、Zk以及Zn为起始端点、结束端点或者转折点的坐标位置。
子步骤A2:在δn为(0,0,0)时,指示波导连接物理信息所指示的波导组件存在重叠干涉的部分。
子步骤A3:在δn≠(0,0,0)时,指示波导连接物理信息所指示的波导组件不存在重叠干涉的部分。
步骤160:若是,则将波导连接物理信息中的重叠和干涉的部分对应的转折点进行修改,并将各点的路径进行合并,得到起始端点到结束端点的总路径。
在本发明的一种具体实现方式中,上述步骤160可以包括:
子步骤B1:在δn为(0,0,0)时,则将波导连接物理信息中的重叠和干涉的部分对应的转折点进行修改。
子步骤B2:将各点的路径进行合并,得到起始端点到结束端点的总路径。
步骤170:依据总路径,基于A*算法建立open、closed表以及path表。
在本发明的一种具体实现方式中,上述步骤170可以包括:
子步骤C1:选取起始端点为当前节点,创建open表,用于记录波导过当前节点后下一个可经过的控制点。
其中,open表中的数据,两个相邻的转折点的坐标值至少有一个保持一致。
子步骤C2:创建pool表,用于记录所有曾考察过的可经过的控制点。
子步骤C3:创建path表,用于依次记录波导路径上的控制点信息者。
由于波导为刚性折弯,故波导在折弯时最多沿两个方向改变坐标值。故比较转折点i和转折点j时,对两者的坐标(Xi,Yi,Zi)和(Xj,Yj,Zj),坐标值至少有一个保持一致。两者之间的距离为
表4G和H计算表
*注:点1为起始点,点n为终结点
步骤180:基于open表、closed表以及path表,计算每个控制点关于当前节点的估价函数,生成目标数据。
在本发明的一种具体实现方式中,上述步骤180可以包括:
子步骤D1:将控制点的位置信息添加至open表和pool表。
子步骤D2:计算open表中每个控制点n关于当前节点m的估价函数F(n)=Gmn+Hn。
其中,F(n)用于表征从m经过控制点n到结束端的总距离,Gmn为每个控制点n和当前节点m之间的距离,Hn为每个控制点n到终点的距离。
子步骤D3:根据估价函数生成目标数据。
步骤190:删除目标数据中的重复路径后,生成波导网路的最终路径。
波导网路的最终路径如表5所示。
表5波导网路最终路径
本发明适用于各种卫星平台载荷舱,如CAST2000,东方红三号、东方红四号等平台的卫星载荷舱。由于平台不同,载荷舱所呈现的组合形式就不同,有适用于CAST2000平台的舱板式结构,载荷舱由2块短隔板和1块长隔板搭接成“十”字型结构,如图2所示。以及东方红三号、东方红四号平台的壁板形式,结构呈“∏”字形,包括南北板,对地板等,如图3所示。
本发明实施例提供的方案,通过获取不同规格波导信息和单机的波导连接信息;将不同规格波导信息和单机的波导连接信息进行整合,得到波导的连接信息;基于第一预设规则,确定各波导的连接信息的转折点;基于波导的连接信息和转折点,得到波导连接物理信息;确定波导连接物理信息所指示的波导组件是否存在重叠干涉的部分;若是,则将波导连接物理信息中的重叠和干涉的部分对应的转折点进行修改,并将各点的路径进行合并,得到起始端点到结束端点的总路径;依据总路径,基于A*算法建立open、closed表以及path表;基于open表、closed表以及path表,计算每个控制点关于当前节点的估价函数,生成目标数据;删除目标数据中的重复路径后,生成波导网路的最终路径。设备、控制点及支架的数量及位置由设计师完成设计并形成三维模型,在设计波导时,本发明对波导和对应的单机连接时,无需设计师根据对应的单机连接关系,选定需要连接的单机,根据不同频段波导的弯曲规则,形成简单的走向路径,再根据实际情况对走向进行调整,满足干涉性要求。直接自动通过不同规格波导信息和单机的波导连接信息,构建波导的连接信息,基于转折点,得到波导连接物理信息,通过一系列的处理,最终得到波导网路的最终路径,并基于最终路径,完成有效的波导路径,从而解决现有的由于设计师技术能力不一而设计出的路径不一致的问题。
参照图4,示出了本发明实施例提供的一种波导路径生成装置的步骤流程图,如图4所示,波导路径生成装包括:
获取模块201,用于获取不同规格波导信息和单机的波导连接信息;
整合模块202,用于将所述不同规格波导信息和所述单机的波导连接信息进行整合,得到波导的连接信息;
第一确定模块203,用于基于第一预设规则,确定各所述波导的连接信息的转折点;
第二确定模块204,用于基于所述波导的连接信息和所述转折点,得到波导连接物理信息;
第三确定模块205,用于确定所述波导连接物理信息所指示的波导组件是否存在重叠干涉的部分;
修改模块206,用于若是,则将所述波导连接物理信息中的重叠和干涉的部分对应的转折点进行修改,并将各点的路径进行合并,得到起始端点到结束端点的总路径;
建立模块207,用于依据总路径,基于A*算法建立open、closed表以及path表;
计算模块208,用于基于所述open表、closed表以及path表,计算每个控制点关于当前节点的估价函数,生成目标数据;
生成模块209,用于删除所述目标数据中的重复路径后,生成波导网路的最终路径。
可选地,所述第一预设规则为转折点的初始路径的所有曲线正置正交,且段数最少。
可选地,所述第三确定模块包括:
对比子模块,用于对波导连接物理信息中的各起始端点、结束端点以及转折点的坐标位置基于以下方式进行对比:
δn=(Xk-Xn,Yk-Yn,Zk-Zn);
其中,Xk、Xn、Yk、Yn、Zk以及Zn为起始端点、结束端点或者转折点的坐标位置;
第一指示子模块,用于在所述δn为(0,0,0)时,指示所述波导连接物理信息所指示的波导组件存在重叠干涉的部分;
第二指示子模块,用于在所述δn≠(0,0,0)时,指示所述波导连接物理信息所指示的波导组件不存在重叠干涉的部分。
可选地,所述修改模块包括:
修改子模块,用于在所述δn为(0,0,0)时,则将所述波导连接物理信息中的重叠和干涉的部分对应的转折点进行修改;
确定子模块,用于将各点的路径进行合并,得到起始端点到结束端点的总路径。
可选地,所述建立模块包括:
选取子模块,用于选取起始端点为当前节点,创建open表,用于记录波导过当前节点后下一个可经过的控制点;其中,所述open表中的数据,两个相邻的转折点的坐标值至少有一个保持一致;
第一创建子模块,用于创建pool表,用于记录所有曾考察过的可经过的控制点;
第二创建子模块,用于创建path表,用于依次记录波导路径上的控制点信息。
可选地,所述生成模块包括:
查找子模块,用于在所述波导连接物理信息中查找与当前节点实际距离小于预设距离的控制点;
添加子模块,用于将控制点的位置信息添加至open表和pool表;
计算子模块,用于计算open表中每个控制点n关于当前节点m的估价函数F(n)=Gmn+Hn;其中,F(n)用于表征从m经过控制点n到结束端的总距离,Gmn为每个控制点n和当前节点m之间的距离,Hn为每个控制点n到终点的距离;
生成子模块,用于根据估价函数生成目标数据。
本发明实施例提供的方案,通过获取不同规格波导信息和单机的波导连接信息;将不同规格波导信息和单机的波导连接信息进行整合,得到波导的连接信息;基于第一预设规则,确定各波导的连接信息的转折点;基于波导的连接信息和转折点,得到波导连接物理信息;确定波导连接物理信息所指示的波导组件是否存在重叠干涉的部分;若是,则将波导连接物理信息中的重叠和干涉的部分对应的转折点进行修改,并将各点的路径进行合并,得到起始端点到结束端点的总路径;依据总路径,基于A*算法建立open、closed表以及path表;基于open表、closed表以及path表,计算每个控制点关于当前节点的估价函数,生成目标数据;删除目标数据中的重复路径后,生成波导网路的最终路径。设备、控制点及支架的数量及位置由设计师完成设计并形成三维模型,在设计波导时,本发明对波导和对应的单机连接时,无需设计师根据对应的单机连接关系,选定需要连接的单机,根据不同频段波导的弯曲规则,形成简单的走向路径,再根据实际情况对走向进行调整,满足干涉性要求。直接自动通过不同规格波导信息和单机的波导连接信息,构建波导的连接信息,基于转折点,得到波导连接物理信息,通过一系列的处理,最终得到波导网路的最终路径,并基于最终路径,完成有效的波导路径,从而解决现有的由于设计师技术能力不一而设计出的路径不一致的问题。
本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
- 一种波导路径生成方法及装置
- 行驶路径生成装置、行驶路径生成方法、行驶路径生成程序以及无人机