开关型调节驱动器及其调节驱动方法
文献发布时间:2023-06-19 09:32:16
技术领域
本发明涉及电源技术领域,具体涉及一种开关型调节驱动器及其调节驱动方法。
背景技术
不同电气/电子装置是在特定操作电压下运作。例如,集成电路(IC)一般是用5V、3V或1.8V供电,而高电压装置需要来自市电的110V或220V交流电。尤其地,发光二极管(LED)显示器的灯管需要操作在更高的操作电压下。因此,许多电源转换器已被开发以满足不同的需求。
这些电源转换器又包括SSR(secondary side regulation,次级端调节驱动器)和PSR(primary side regulation,开关型调节驱动器)。在PSR应用中,只有在次级退磁开始2-3uS才能捕捉到次级输出电压,空载时候,通常退磁,谐振完之后,通常需要隔几mS或者几十mS,再进行一次轻开启用于检测输出电压,若开启频繁了会导致输出电压浮飘,这样需要加大假负载功耗,降低效率,因此在空载期间输出突然带载,会突然拉低输出电压,而没法及时反馈到初级。若通过辅助绕组以开关周期检测输出电压信息,不能做到实时检测输出电压。当负载很轻时开关频率可低至几百Hz,在此条件下由空载切至满载时,需要经过1-2个周期时间(可达几ms)前级芯片才能检测到输出电压,在这期间无法向输出传输能量,输出电压由于负载的消耗会跌落至较低水平甚至到0V。
为了解决上述问题,通常的做法是:直接检测输出电压的信息。当输出电压低于设定阈值时,通过辅助绕组向前级芯片传输相关信号,前级芯片接收到相关信号后,立即出驱动信号向输出传输功率以尽可能避免输出电压跌落。但是直接检测输出电压需要设置特定的输出电压反馈管脚,不利于驱动器的小型化。
因此,有必要提供改进的技术方案以克服现有技术中存在的以上技术问题。
发明内容
为了解决上述技术问题,本发明提供了一种开关型调节驱动器及其调节驱动方法,通过检测同步整流管两功率端电压的信息,间接采样输出电压的信息,从而与前级芯片匹配实现动态加速的功能,降低对输出引脚的依赖。
一方面,根据本发明提供的一种开关型调节驱动器,包括:包括初级绕组、次级绕组的变压器;第一晶体管,第一功率端与所述初级绕组的同名端连接,第二功率端通过电流感测电阻与参考地连接;控制器,分别与所述第一晶体管的控制端和第二功率端连接;同步整流管,连接于所述次级绕组的异名端与参考地之间;驱动控制模块,分别与所述同步整流管的控制端和所述次级绕组的异名端连接,其中,所述驱动控制模块用以在所述同步整流管断开所述次级绕组的异名端与参考地之间的导电路径时,检测所述同步整流管两功率端电压的目标参数,并在检测到所述同步整流管两功率端电压的目标参数满足预设条件时,所述控制器控制所述第一晶体管的开关动作以使所述初级绕组向所述次级绕组传输功率。
可选地,所述开关型调节驱动器还包括:所述驱动器还包括辅助绕组,辅助绕组两功率端的电压信号经过分压电阻分压后产生分压信号传输给所述控制器,所述所述控制器根据所述分压信号的信息控制所述第一晶体管的开关动作。
可选地,所述开关型调节驱动器还包括:输入电容,一端与所述初级绕组的异名端连接,另一端与参考地连接;输出电容,一端与所述次级绕组的同名端连接,另一端与参考地连接。
可选地,所述驱动控制模块包括:第二晶体管和第一电阻,所述第二晶体管和所述第一电阻依次串联于所述次级绕组的异名端与参考地之间;采样单元,与所述次级绕组的异名端连接,用以对所述同步整流管两功率端之间的电压进行采样,以获得所述同步整流管两功率端电压;驱动控制单元,分别与所述采样单元、所述同步整流管的控制端和所述第二晶体管的控制端连接,用以向所述同步整流管提供第二控制信号,以及根据所述同步整流管两功率端电压向所述第二晶体管提供第三控制信号。
可选地,所述驱动控制单元包括:控制信号产生器,包括用以提供所述第二控制信号的第一输出端,以及用以提供所述第三控制信号的第二输出端,驱动器,连接于所述控制信号产生器的第一输出端与所述同步整流管的控制端之间。
可选地,所述同步整流管两功率端电压的目标参数为所述同步整流管两功率端电压的电压幅值,所述预设条件为所述电压幅值小于或等于第一阈值。
可选地,所述第一阈值为预设的固定值;或者所述第一阈值跟随所述同步整流管两功率端电压自适应调整。
可选地,当所述第一阈值为跟随所述同步整流管两功率端电压自适应调整时,所述驱动控制模块还包括:采样滤波保持单元,与所述次级绕组的异名端连接,用以对所述同步整流管两功率端之间的电压进行采样滤波处理后获得所述同步整流管两功率端电压的平均值;比例调整单元,分别与所述采样滤波保持单元和所述驱动控制单元连接,用以根据所述同步整流管两功率端电压的平均值和预设比例系数获得所述第一阈值,其中,所述第一阈值为所述平均值与所述预设比例系数的乘积,所述预设比例性系数记为K%,K大于等于80且小于100。
可选地,所述同步整流管两功率端电压的目标参数为所述同步整流管两功率端电压的下降斜率,所述预设条件为所述下降斜率大于第二阈值。
可选地,所述驱动控制模块还包括:计时单元,与所述驱动控制单元连接,用以在每当检测到第二控制信号的上升沿后重新计时,并在当计时值达到第三阈值时触发所述驱动控制模块对所述同步整流管两功率端电压的目标参数进行检测。
可选地,所述开关型调节驱动器还包括:第二电阻、第一电容和第一二极管,所述第二电阻和所述第一电容相互并联后连接于所述初级绕组的异名端与所述第一二极管的阴极之间,所述第一二极管的阳极与所述初级绕组的同名端连接。
可选地,所述第一晶体管、所述同步整流管和所述第二晶体管均为NMOS晶体管。
另一方面,根据本发明提供的一种开关电源,包括:如上述的开关型调节驱动电路。
再一方面,根据本发明提供的一种开关型调节驱动方法,该开关型调节驱动方法可应用于如上述的开关型调节驱动电路,具体包括:使第一电流脉冲流经变压器的初级绕组,并基于第一控制信号在变压器的次级绕组上形成第二电流脉冲;将第二控制信号输入至同步整流管的控制端,由所述同步整流管对所述第二电流脉冲进行整流,以便于形成输出电压,其中,所述方法还包括:检测所述同步整流管两功率端电压的目标参数,并在检测到所述同步整流管两功率端电压的目标参数满足预设条件时,触发控制器控制所述初级绕组向所述次级绕组传输功率。
可选地,检测所述同步整流管两功率端电压的目标参数,并在检测到所述同步整流管两功率端电压的目标参数满足预设条件时,触发控制器控制所述初级绕组向所述次级绕组传输功率包括:检测所述同步整流管两功率端电压的电压幅值,并在检测到所述同步整流管两功率端电压的电压幅值小于或等于第一阈值时,触发所述控制器控制所述初级绕组向所述次级绕组传输功率。
可选地,检测所述同步整流管两功率端电压的目标参数,并在检测到所述同步整流管两功率端电压的目标参数满足预设条件时,触发控制器控制所述初级绕组向所述次级绕组传输功率包括:检测所述同步整流管两功率端电压的下降斜率,并在检测到所述同步整流管两功率端电压的下降斜率大于第二阈值时,触发所述控制器控制所述初级绕组向所述次级绕组传输功率。
可选地,触发控制器控制所述初级绕组向所述次级绕组传输功率包括:产生具有第一频率的第三控制信号,基于所述第三控制信号在所述次级绕阻上形成第三电流脉冲;基于所述第三电流脉冲在变压器的辅助绕组上形成感应电流,基于所述感应电流形成触发信号至所述控制器;由所述触发信号触发所述控制器控制所述初级绕组所在的电流回路导通,向所述次级绕组传输功率。
可选地,检测所述同步整流管两功率端电压的目标参数之前还包括:检测所述第二控制信号的上升沿,在每当检测到所述第二控制信号的上升沿后重新计时;当计时值达到第三阈值时触发对所述同步整流管两功率端电压的目标参数进行检测。
本发明的有益效果是:本发明公开了一种开关型调节驱动器及其调节驱动方法,在驱动器的次级绕组端设置有驱动控制模块,通过驱动控制模块对同步整流管两功率端电压的目标参数的检测,达到了间接采样输出电压信息的目的,从而与前级芯片匹配实现动态加速的功能,避免输出电压跌落,同时也能够降低对输出引脚的依赖,甚至节省输出引脚。
将第一阈值跟随同步整流管两功率端电压进行自适应调整,可以在输出电压波动比较大,且距离第一阈值差距也较大时,加快动态反应,避免输出电压掉落太多。
采用计时单元在检测到第二控制信号的上升沿后重新计时,并在计时值达到第三阈值时进行目标参数的检测,能够提高检测的准确性和可靠性。
应当说明的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
附图说明
通过以下参照附图对本发明实施例的描述,本发明的上述以及其他目的、特征和优点将更为清楚。
图1示出现有的一种开关型调节驱动器的电路结构示意图;
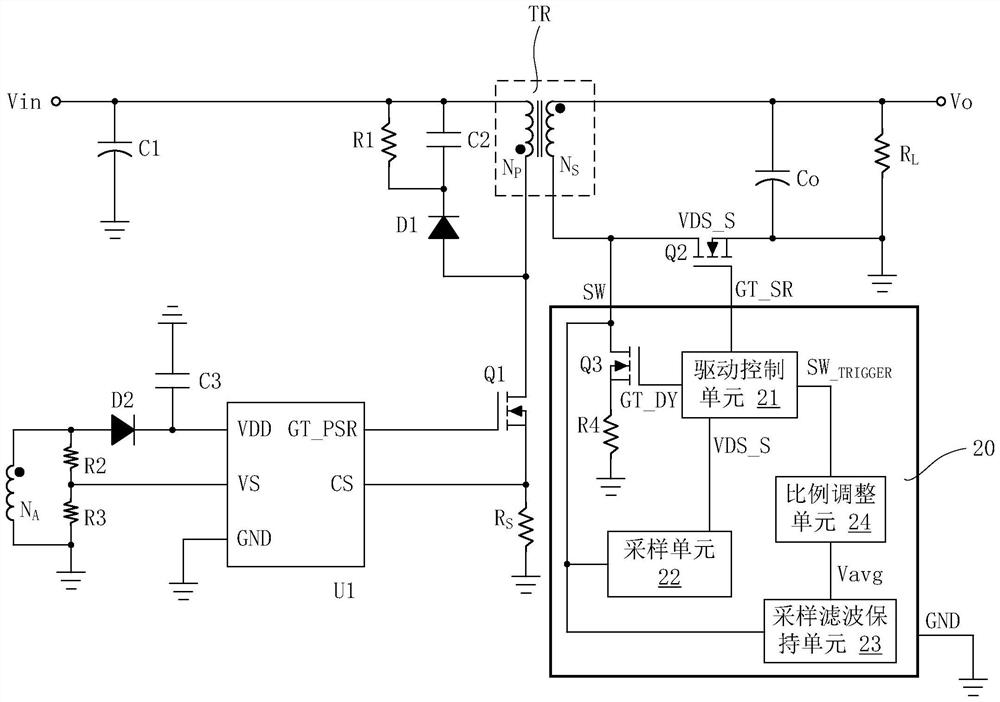
图2示出根据本公开实施例提供的开关型调节驱动器的电路结构示意图;
图3示出根据本公开实施例提供的开关型调节驱动器中驱动控制单元的电路结构示意图;
图4a和图4b分别示出根据本公开不同实施例提供的开关型调节驱动器的信号波形示意图;
图5示出根据本公开实施例提供的开关型调节驱动方法的流程框图。
具体实施方式
为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳实施例。但是,本发明可以通过不同的形式来实现,并不限于本文所描述的实施例。相反的,提供这些实施例的目的是使对本发明的公开内容的理解更加透彻全面。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。
下面,参照附图对本发明进行详细说明。
图1示出现有的一种开关型调节驱动器的电路结构示意图。
如图1所示,开关型调节驱动器包括:变压器TR、输入电容C1、第一晶体管Q1、电流感测电阻Rs、控制器U1、同步整流管Q2、输出电容Co以及驱动控制器10。其中,变压器TR包括初级绕组N
驱动控制器10包括:GT_SR(第二控制信号输出)管脚、GND(参考接地)管脚、Fo(输出电压检测)管脚以及SW(反馈调节)管脚。GT_SR管脚与同步整流管Q2的控制端连接,GND管脚连接至参考地,Fo管脚连接至直流输出电压Vo输出端,SW管脚连接至次级绕组N
控制器U1包括但不限于:VDD(供应电压输入)管脚、GND(参考接地)管脚、GT_PSR(栅极驱动输出)管脚、CS(电流感测输入)管脚以及VS(电压感测输入)管脚。其中,VDD管脚是经由电压调节器(包括第二二极管D2以及第三电容C3)连接至辅助绕组N
当控制器U1控制第一晶体管Q1导通时,输入电压Vin经由变压器TR的初级绕组N
在基于图1所示的开关型调节驱动器电路进行直流输出电压Vo的电压检测时,只能通过驱动控制器10的Fo管脚直接检测输出电压的信息,当输出电压低于设定阈值时,通过SW管脚对次级绕组N
基于此,本公开在图1所示电路的基础上进行了改进以克服上述技术问题,改进后的开关型调节驱动器的电路结构如图2和图3所示。其中,图2所示的改进后的开关型调节驱动器中与图1所示的开关型调节驱动器的相同的电路结构处将不再赘述,具体可参考图1的描述。图2示出根据本公开实施例提供的开关型调节驱动器的电路结构示意图,图3示出根据本公开实施例提供的开关型调节驱动器中驱动控制单元的电路结构示意图,图4a和图4b分别示出根据本公开不同实施例提供的开关型调节驱动器的信号波形示意图。
如图2所示,本实施例中,开关型调节驱动器为包括:驱动控制模块20。驱动控制模块20包括GT_SR(第二控制信号输出)管脚、GND(参考接地)管脚以及SW(反馈调节)管脚。GT_SR管脚与同步整流管Q2的控制端连接,GND管脚连接至参考地,SW管脚连接至次级绕组N
驱动控制模块20用以在同步整流管Q2断开次级绕组N
进一步地,本实施例中,同步整流管Q2的第一功率端与次级绕组N
可以理解的是,当负载R
进一步地,本实施例中,驱动控制模块20包括:第二晶体管Q3、第一电阻R4、采样单元22和驱动控制单元21。第二晶体管Q3和第一电阻R4依次串联于次级绕组N
示例性的,如图3所示,驱动控制单元21包括:控制信号产生器211和驱动器212。控制信号产生器211包括用以提供第二控制信号GT_SR的第一输出端1,以及用以提供第三控制信号GT_DY的第二输出端2。驱动器212连接于控制信号产生器211的第一输出端1与同步整流管Q2的控制端之间,并基于电源VCC和参考地工作。控制信号产生器211产生的第二控制信号GT_SR若为数字信号,可通过驱动器212转换为模拟信号后再输出至同步整流管Q2,以更好的实现对同步整流管Q2的驱动控制。基于相同原理的,在控制信号产生器211的第二输出端2与第二晶体管Q3的控制端之间也可设置相同的驱动器。
在本公开的一个实施例中,同步整流管Q2两功率端电压VDS_S的目标参数为同步整流管两功率端电压VDS_S的电压幅值,其所需满足的预设条件为同步整流管两功率端电压VDS_S的电压幅值小于或等于第一阈值。同时参考图4a,开关型调节驱动器正常工作时,第一控制信号GT_PSR和第二控制信号GT_SR为正常的驱动频率。开关型调节驱动器正常工作大体包括在t0时刻-t1时刻内,第一控制信号GT_PSR为高电平,控制第一晶体管Q1导通,辅助绕组N
可以理解的是,本实施例中,驱动控制模块20中(如在驱动控制模块20的驱动控制单元21中)设置有相应的第一检测单元,该第一检测单元用于在t5时刻后对电压VDS_S与第一阈值SW
本公开中,该第一阈值为预设的固定值,或者该第一阈值跟随同步整流管两功率端电压VDS_S自适应调整。其中,当第一阈值为跟随同步整流管两功率端电压VDS_S自适应调整时,驱动控制模块20还包括:采样滤波保持单元23和比例调整单元24。其中,采样滤波保持单元23与次级绕组N
进而,由驱动控制单元21(本实施例中如将第一检测单元设置于驱动控制单元21内,进而即由第一检测单元)接收采样单元22采样获得的同步整流管两功率端电压VDS_S和对应的第一阈值SW
在本公开的另一个实施例中,参考图4b,其中,图4b与图4a中的相同之处可参考对图4a的说明进行理解,此处不再赘述。其不同之处在于,本实施例中,同步整流管两功率端电压VDS_S的目标参数为同步整流管两功率端电压VDS_S的下降斜率,其所需满足的预设条件为同步整流管两功率端电压VDS_S的下降斜率大于第二阈值。基于此,驱动控制模块20中设置有相应的第二检测单元,该第二检测单元用于检测电压VDS_S的幅值的下降斜率(如记为dv/dt),并在该下降斜率大于第二阈值VT1时输出相应的控制信号至控制信号产生器211,进而触发控制信号产生器211产生第三控制信号GT_DY。与前述相同原理的,该第二阈值为预设的固定值,或者该第二阈值跟随同步整流管两功率端电压的下降斜率自适应调整。
综上,进一步地,驱动控制模块20还包括:计时单元。该计时单元与驱动控制单元21连接,用以在每当检测到第二控制信号GT_SR的上升沿后重新计时,并在当计时值达到第三阈值时(例如图4a和图4b中的t5时刻)触发驱动控制模块20对同步整流管Q2两功率端电压VDS_S的目标参数进行检测。如此,能够提高对电压VDS_S的检测的准确性和可靠性,避免在其他驱动器的正常工作时刻出现对第三控制信号的误触发情况。
应当理解的是,在图4a和图4b中所标识的第三阈值T
进一步地,本实施例中,在变压器TR的初级绕组N
图5示出根据本公开实施例提供的开关型调节驱动方法的流程框图。
如图5所示,本实施例中,该开关型调节驱动方法可应用于如图2至图3中所描述的开关型调节驱动器中,其包括执行步骤S1至步骤S3。
具体的,在步骤S1中,使第一电流脉冲流经变压器的初级绕组,并基于第一控制信号在变压器的次级绕组上形成第二电流脉冲。
参考图2,基于输入电压Vin产生第一电流脉冲,由控制器U1输出高电平的第一控制信号GT_PSR以控制第一晶体管Q1导通,进而使得第一电流脉冲经由变压器TR的初级绕组N
在步骤S2中,将第二控制信号输入至同步整流管的控制端,由同步整流管对第二电流脉冲进行整流,以便于形成输出电压。
在次级绕组N
在步骤S3中,检测同步整流管两功率端电压的目标参数,并在检测到同步整流管两功率端电压的目标参数满足预设条件时,触发控制器控制初级绕组向次级绕组传输功率。
在本公开的一个实施例中,检测同步整流管两功率端电压的目标参数,并在检测到同步整流管两功率端电压的目标参数满足预设条件时,触发控制器控制初级绕组向次级绕组传输功率包括:检测同步整流管两功率端电压的电压幅值,并在检测到同步整流管两功率端电压的电压幅值小于或等于第一阈值时,触发控制器控制初级绕组向次级绕组传输功率。
在本公开的另一个实施例中,检测同步整流管两功率端电压的目标参数,并在检测到同步整流管两功率端电压的目标参数满足预设条件时,触发控制器控制初级绕组向次级绕组传输功率包括:检测同步整流管两功率端电压的下降斜率,并在检测到同步整流管两功率端电压的下降斜率大于第二阈值时,触发控制器控制初级绕组向次级绕组传输功率。
进一步地,触发控制器控制初级绕组向次级绕组传输功率包括:产生具有第一频率的第三控制信号,基于第三控制信号在次级绕阻上形成第三电流脉冲;基于第三电流脉冲在变压器的辅助绕组上形成感应电流,基于感应电流形成触发信号至控制器;由触发信号触发控制器控制初级绕组所在的电流回路导通,向次级绕组传输功率。本实施例中,参考图2和图3,在检测到检测到同步整流管两功率端电压的目标参数满足预设条件的情况下,触发驱动控制单元21产生具有第一频率的第三控制信号GT_DY至第二晶体管Q3,通过间断性的导通/关断第二晶体管Q3,进而在辅助绕阻N
本公开中,在检测同步整流管两功率端电压的目标参数之前还包括:检测第二控制信号的上升沿,在每当检测到第二控制信号的上升沿后重新计时(即清零当前的计时值,并开始重新计时);当计时值达到第三阈值时触发对同步整流管两功率端电压的目标参数进行检测。可以理解的是,也可以在每当检测到第二控制信号的上升沿后,计算当前时刻的计时值与前一次上升沿时刻的计时值之间的差值,判断该差值是否结束并清零当前的计时值,开始重新计时,并在该差值达到第三阈值时触发对同步整流管两功率端电压的目标参数进行检测。
进一步地,驱动控制模块20在检测到驱动器恢复正常工作后停止输出第三控制信号。
本公开还设计一种开关电源,该开关电源中半含有对应如图2至图3中所描述的开关型调节驱动器。
综上,本公开在驱动器的次级绕组端设置有驱动控制模块,通过驱动控制模块对同步整流管两功率端电压的目标参数的检测,达到了间接采样输出电压信息的目的,从而与前级芯片匹配实现动态加速的功能,避免输出电压跌落,同时也能够降低对输出引脚的依赖,甚至节省输出引脚。
应当说明的是,在本文中,所含术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
最后应说明的是:显然,上述实施例仅仅是为清楚地说明本发明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引申出的显而易见的变化或变动仍处于本发明的保护范围之中。
- 开关型调节驱动器及其调节驱动方法
- 用于转向柱的调节驱动器、用于调节驱动器的驱动单元、用于机动车辆的马达可调节式转向柱以及用于制造用于转向柱的调节驱动器的方法