旋转角度的感测
文献发布时间:2023-06-19 09:36:59
技术领域
本申请的各实施例涉及旋转角度的感测。
背景技术
例如,在[Slawomir Tumanski:Induction Coil Sensors–a Review;http://www.tumanski.x.pl/coil.pdf]中描述了感应传感器的原理。
在许多应用中,不能直接进入轴的端部来测量角度。作为解决方案,可以通过测量X-Y(X-Z或Y-Z)分量来使用磁3D传感器。传感器位于轴外,即,不在轴的旋转轴线上。轴本身具有磁编码器,该磁编码器具有至少两个磁极(一个被称为N,另一个被称为S)。参考[Infineon的应用说明,“Out of Shaft with magnetic 3D sensor”,2018年07月31日,在以下位置公开可用:https://www.infineon.com/dgdl/Infineon-Out_of_Shaft-AN-v01_00-EN.pdf?fileId=5546d46265257de801653898ba536074]。
发明内容
本发明的目的是改进用于感测例如轴的旋转角度的现有解决方案。
该目的根据按照本发明的特征来实现。在本文中可以得出另外的实施例。
特别地,在本文中提出的示例可以基于以下解决方案中的至少一个解决方案。可以利用以下特征的组合来达到期望的结果。方法的特征可以与设备、装置或系统的任何一个或多个特征组合,反之亦然。
提供了一种旋转角度感测设备,所述设备包括:
-磁场源,能够机械地联接到可旋转的轴;
-至少一个导电目标(target),能够机械地联接到可旋转的轴;
-磁角度传感器,被布置为检测磁场源的磁场;
-至少一个线圈,被布置为:
-在至少一个导电目标中激发涡电流;并且
-接收由电流感应出的信号。
至少一个线圈可以被布置为远程地激发至少一个导电目标中的涡电流。
至少一个导电目标可以是在本文中描述的目标结构的一块或一部分,或者可以是所述目标结构。
应当注意的是,至少一个导电目标可以直接或间接地机械联接到轴。至少一个导电目标可以联接到轴本身、联接到载体或联接到磁场源。
导电目标不必附接到磁场源;使导电目标与磁场源连贯地旋转可能就足够了。这可以例如通过将磁场源和目标固定到(共同的)轴上来实现。
还应当注意的是,磁传感器原理和感应传感器原理的组合是有利的,因为两者都使用磁场:磁场的静态部分用于磁原理,并且磁场的时变部分用于感应原理。这两种原理对于例如油、油脂、湿气或灰尘相当鲁棒。
还应当注意的是,磁场源可以围绕轴以圆形方式布置。一个选项是,磁场源包括部署在基板或任何支撑介质上的多个磁体。
磁角度传感器可以是封装件的一部分,该封装件可以被安装在印刷电路板(PCB)上。
磁角度传感器可以包括至少两个角度传感器元件,这些角度传感器元件被布置为检测(不同方向的)不同磁场分量。
在一个示例性实施例中,磁场源可以是多极永磁体(permanent multipolemagnet),其中数个导电目标在基本恒定的径向距离和基本恒定的轴向位置处,以基本恒定的方位角方向与磁体的磁极对准。
根据一个实施例,磁场源被固定在轴上,并且磁场源包括以下各项中的至少一项:
-永磁体;
-环形磁体;
-注塑铁氧体(injection molded ferrite)。
根据一个实施例,磁场源包括偶极磁体或多极磁体。
在磁场源包括偶极磁体的情况下,所生成的单个信号的完整周期可以对应于轴的总计360°的旋转。在磁场源包括多极磁体的情况下,每360°的旋转会生成数个这种完整周期。而且,可以提供单个导电目标(例如,包括单个齿的导电目标结构),该导电目标允许每360°的旋转生成信号的单个周期,或者可以提供数个导电目标(例如,包括数个齿的导电目标结构),这些导电目标允许每360°旋转生成信号的数个周期。
根据一个实施例,磁场源和/或至少一个导电目标被布置为:轴每旋转一圈,磁场源和/或至少一个导电目标生成信号的一个或数个周期。
因此,磁场源和/或至少一个导电目标可以被布置为使得在(轴)每旋转一圈时可以生成信号的一个或数个周期。
根据一个实施例,至少一个导电目标被布置在磁场源的表面上。
根据一个实施例,至少一个导电目标包括以下各项中的至少一项:
-铝;
-铜;
-金属板;
-普通的金属件(plain piece of metal);
-金属壳;
-金属箔;
-线圈,包括具有至少一个回路的导线和/或导电路径;
-开放或闭合的螺旋或回路。
至少一个目标可以是刚性金属,该刚性金属用作用于磁场源的固定装置。特别地,一个选项是,至少一个目标增加机械稳定性。
还可以选择将磁场源注射成型在目标周围,以获得基本光滑和均匀的表面。
根据一个实施例,至少一个导电目标具有低的磁化率,特别地具有在0.9与1.1之间的范围内的相对磁导率。
根据一个实施例,至少一个导电目标包括带(tape)或涂层。
磁场源的电导率可以显著小于导电目标的电导率(例如,小了至少100倍)。
根据一个实施例,至少一个导电目标被粘到或喷涂到支撑结构或磁场源本身,该支撑机构联接到磁场源。
根据一个实施例,至少一个线圈包括差动线圈(differential coils)。
例如,感应系统(即,至少一个线圈)可以包括具有相同匝数-面积(即,匝数和每匝面积的乘积)的两个线圈子系统,这两个子系统可以串联连接,但是一个子系统相对于另一个子系统被翻转并且被放置在旁边,使得交流(AC)场不会在整个线圈系统中感应出任何信号。与非差动线圈相比,差动线圈具有较低的电磁发射(electromagnetic emission)。
根据一个实施例,至少一个导电目标相对于磁场源对准。
根据一个实施例,磁角度传感器被布置为检测由磁场源向磁角度传感器施加的磁场的空间方向。
磁角度传感器可以被定位在磁场源的任何表面的对面,优选地以较小的间隙(距磁场源的表面的距离)被定位。至少一个导电目标可以被放置在该优选的表面上或该优选的表面处,或者被放置在该优选的表面附近。
根据一个实施例,磁角度传感器包括以下各项中的至少一项:
-MR传感器;
-AMR传感器;
-GMR传感器;
-TMR传感器;
-霍尔板;
-垂直霍尔效应器件。
角度传感器可以包括至少一个传感器元件。传感器元件可以是或可以包括以下各项中的至少一项:AMR(各向异性MR)传感器、GMR(巨MR)传感器、TMR(隧道MR)传感器、霍尔板或垂直霍尔效应器件。
角度传感器可以是传感器封装件、传感器部件板或传感器模块。
根据一个实施例,至少一个线圈由交流电(AC)驱动。
应当注意的是,感应系统可以以具有在从1kHz到1000MHz的范围内的、特别是4MHz的AC频率的信号运行。可以选择信号,以使信号与集成电路技术(例如,硅CMOS技术)中的电容和线圈的参数匹配。AC的信号可以是正弦波,或者可以是脉冲形的。频率可以是固定的,或者可以周期性地改变或根据(伪)随机模式改变。
根据一个实施例,在至少一个导电目标中激发电流的线圈与接收所感应出的信号的线圈是同一线圈。
根据一个实施例,一个线圈在至少一个导电目标中激发电流,并且另一个线圈接收所感应出的信号。
根据一个实施例,磁角度传感器和至少一个线圈被布置在单个封装件中。
根据一个实施例,包括处理设备,该处理设备被布置为:将所检测的磁场与所接收的由电流感应出的信号组合,以便导出轴的旋转角度。
处理设备可以包括以下各项中的至少一项:处理器、微控制器、硬连线电路、ASIC、FPGA、逻辑设备。
此外,提出了一种用于感测轴的旋转角度的方法,该轴被布置为能够绕旋转轴线旋转,其中磁场源能够机械地联接到轴,其中至少一个导电目标能够机械地联接到轴,该方法包括:
-由磁角度传感器检测磁场源的磁场;
-经由至少一个线圈在至少一个导电目标中激发电流;
-由至少一个线圈接收由电流感应出的信号。
根据一个实施例,该方法包括:
-将所检测的磁场与所接收的由电流感应出的信号组合,以便导出轴的旋转角度。
因此,可以(例如,在磁场源附近)提供一种传感器封装件,该传感器封装件可以特别地包括作为磁场感测设备的磁角度传感器、至少一个线圈和一些电路装置。传感器封装件特别地被布置为:
(i)检测由磁场源生成的磁场的磁角度;
(ii)通过至少一个线圈驱动AC;
(iii)从导电目标中的涡电流中检测所感应出的信号;
(iv)将磁角度传感器的读数与所感应出的信号组合,以便导出轴的旋转角度。
应当注意的是,可以检测信号(即,磁角度传感器的读数和/或所感应出的信号)中的特定事件,例如,零交叉(zero crossing)或上升沿或极值。可以基于这种事件来最终确定轴的旋转角度。
附图说明
参考附图示出和说明了实施例。附图用于说明基本原理,因此仅图示了对于理解基本原理所必需的方面。附图并未按比例绘制。在附图中,相同的附图标记表示相似的特征。
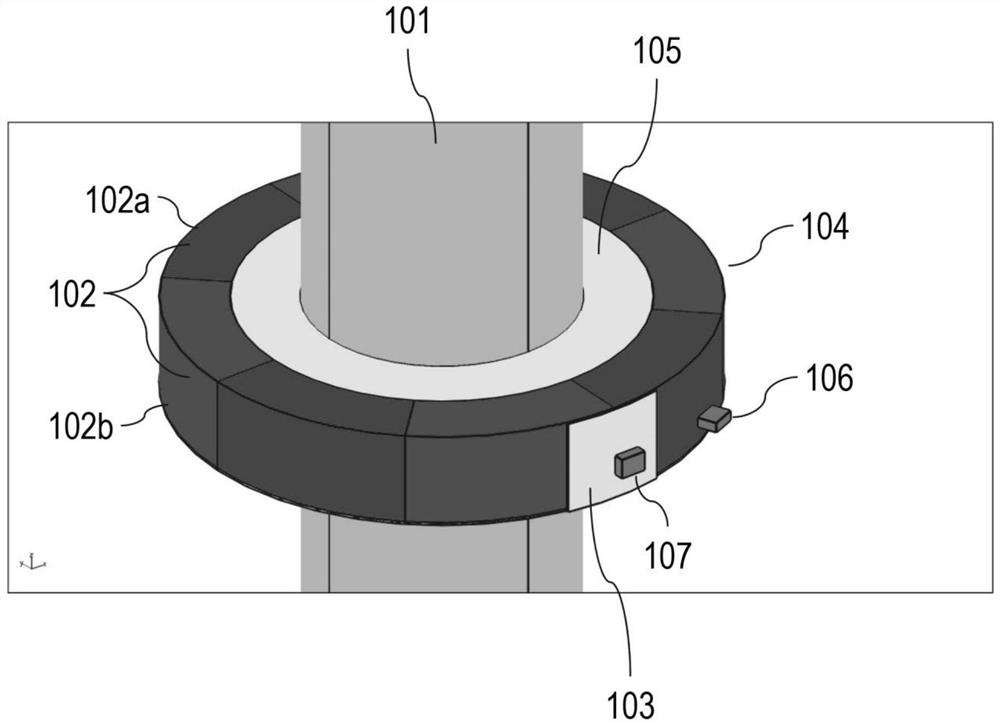
图1示出了示意性布置,该示意性布置包括磁场源(例如,多极磁体)和导电目标(也被称为“目标”),该磁场源机械地联接到能够绕旋转轴线旋转的轴,该导电目标机械地联接到磁场源;
图2从下方示出了图1的布置;
图3示出了具有数个目标的基于图1的示意性布置,其中目标可以被实现为单个物理结构或多个物理结构;
图4从下方示出了图3的布置;
图5示出了图3和图4的布置的平面俯视图;
图6示出了基于图1的示意性布置,该示意性布置具有与用作磁场源的多极磁体的单磁极一样多的目标;
图7示出了包括磁角度、感应角度和差异703的示例性图,差异703是轴的全局位置(即,旋转角度)的函数;
图8示出了包括多极磁体和导电目标(也被称为“目标”)的示意性布置,该多极磁体机械地联接到能够绕旋转轴线旋转的轴,该导电目标位于多极磁体的上表面上;
图9示出了图8的备选实施例,其中目标包括孔;
图10示出了图3的摘录,其中裸片(芯片)包括至少一个线圈;
图11示出了类似于图8的示例性实施例,其中使用偶极磁体代替图8中所示的多极磁体。
具体实施方式
贯穿轴式(through-shaft)磁角度传感器具有长轴,该长轴周围具有环形磁体并且附近具有磁场传感器。传感器检测两个磁场分量B1、B2,并且基于矢量计算磁场角度:
B1*n1+B2*n2
其中n1和n2是在方向1和方向2上的单位矢量。方向1和方向2可以彼此正交或彼此基本正交。关于笛卡尔坐标系,可以从方向x、y和z中选择方向1和方向2。
应当注意的是,传感器可以包括至少两个传感器元件,其中每个传感器元件可以被定向为检测多个方向中的一个方向。传感器元件可以被实现为芯片或裸片;可以以单个封装件的形式提供包括传感器元件的传感器。
该磁场角度与磁体的旋转位置有关。在一个示例性情况下,磁体的旋转位置等于磁场角度。但是,磁场角度和磁体的旋转角度之间还可以存在函数关系。可以使用例如查询表来提供这种函数关系。
偶极磁体提供单个N极和单个S极。因此,偶极磁体的磁场模式在从0°到360°的整个范围内基本上是唯一的。但是,由于磁体的磁极太大而无法以高的均匀度被制造,因此磁场模式可能会受到生产误差(production spread)的影响。磁场传感器也可能是不完美的,这会导致附加的测量误差。
多极磁体具有p对N极和S极。因此,如果磁体仅旋转360°(这定义了实际的机械角度),则磁场角度旋转p*360°(这对应于所谓的电角度)。
因此,仅在360°/p的角度范围内,磁场角度传感器的读出(read out)可以明确地映射到轴的旋转角度。对于一些应用,这是足够的(例如,控制具有p个磁极对的电机),但是对于其他应用,则需要较高的角度分辨率。
多极磁体的优点在于,在计算轴的旋转位置时,传感器本身的误差可以被除以数目p。在这里,电角度误差可以达到在1°和2°之间的范围以下,这有利地导致机械角度误差在1/p°和2/p°之间的范围内。例如,假设具有p=5对N极和S极的多极磁体,则可以实现大约在0.2°和0.4°之间的机械角度误差。
感应角度传感器可以包括:
-固定线圈系统,被提供有交流电(AC);以及
-至少一个可旋转的导电目标,这些可旋转的导电目标可以是金属件、短接有低阻抗负载的线圈等。
目标可以是单个件,或者可以包括多个件(被称为目标)。特别地,目标可以被认为是包括至少一个目标的“目标结构”,特别是包括数个目标的“目标结构”。目标结构可以被实现为单个件或多个件。
线圈的AC磁场在目标中感应出涡电流,并且这些电流感应地耦合到线圈中,从而提供电磁场。电路检测感应出的该电压,并且从所感应出的信号的振幅和/或频移和/或相移导出旋转位置。
固定线圈系统可以包括至少一个线圈。线圈可以是大的(例如,放置在环绕轴的印刷电路板上),也可以是小的(例如,被集成在芯片上)。
目标可以包括齿轮或包括具有孔的一些板或圆筒(drum),或者只是可以粘贴到塑料圆筒上的小铝带。
有利地,可以使用具有p倍(p-fold)旋转对称性的目标,这使得这些目标关于相差360°/p的角度是不明确的。通常,数目p至少为3,但是在p太小或太大的情况下,这种系统的精度可能会降低。
因此,特别地,一个目的是提供一种利用磁场来检测轴的旋转位置的解决方案。可以跨360°范围或在360°范围的部分中确定旋转位置。
特别地,在本文中描述的示例具有成本效益。例如,可以使用单个磁体和单个角度传感器。特别地,传感器可以不需要环绕轴的回路。
特别地,在本文中描述的示例结合了磁原理和感应原理。
例如,磁场源被固定在能够绕旋转轴线旋转的轴上。磁场源可以是或可以包括至少一个永磁体。磁体可以是多极磁体或偶极磁体。磁体的电导率可以很差。
至少一个(高)导电目标可以被固定到磁体。但是,对于利用感应原理的系统而言,有利的是,主要在导电目标中感应出涡电流(在磁场源中感应出的涡电流较少)。
可以(例如,在磁体的附近)提供一种传感器封装件,该传感器封装件包括一个磁场感测设备、感应回路和一些电路装置。传感器封装件被布置为:
(i)检测由磁体生成的磁场的磁角度;
(ii)通过感应回路驱动AC电流;以及
(iii)从导电目标中的涡电流中检测所感应出的信号;
(iv)将磁角度的读数与所感应出的信号组合,以便导出轴的旋转角度。
永磁体及其相关联的磁角度测量系统可以被认为是第一部分(也被称为主要部分),并且感应电路装置及其相关联的目标可以被认为是第二部分(也被称为附属部分)。
但是,这仅作为示例。还可以将第一部分视为附属部分,并且将第二部分视为主要部分。应当注意的是,磁角度测量系统可以用作主系统或附属系统,这同样适用于感应测量系统。
特别地,出于多样化和/或冗余的目的,一个选项是具有不止一个系统(系统是磁测量系统或感应测量系统或两者兼有)。应当注意的是,提供关于轴的旋转角度的信息的数个系统——即使能够至少部分地从多个测量系统中的每个测量系统中导出这种信息——可以用于提高应用的可靠性和/或安全性。
在一个示例性场景中,磁角度测量系统可以用于获取角度读数
导电目标作为单个“齿”被提供,该“齿”可以小于(单个)磁极,或者可以是磁体的一半大小(即在180°上延伸),或者可以除了一个小空隙之外覆盖整个磁体。
在这种情况下,感应系统用于定义基准角度:当单个目标通过感应线圈时,感应信号可以显示一些明显的行为(即,感应信号会突然减小)。
优选地,感应信号的明显行为可以出现在小于磁极对尺寸的角度范围内(即小于360°/p),因为于是系统能够将感应信号与特定的磁极对相关联,并且能够利用n=0对其进行标记。
目标可以以如下的位置被放置在磁体上,这样的位置使得对于CW(顺时针)旋转,感应特征在接近上升到180°以上的角度
在传感器系统上电之后,传感器系统可以等待直至检测到感应信号。每次检测到感应信号时,系统都会初始化n=0。根据过去检测到的磁角度,系统知道旋转方向(对于CW,DIR=+1,对于CCW,DIR=-1)。然后,系统以如下方式计算旋转角度:
在每个完整的磁周期之后,取决于旋转方向DIR,n增加或减少1。图1从上方示出了示意性布置。这是一种示例性布置,包括直径等于20mm的轴101和p=4个磁极对102的多极磁体104。磁体104的磁极对102具有相同的尺寸,其中每个单磁极覆盖360°/8=45°的角度。每个磁极对102包括磁极102a和磁极102b。多极磁体104是具有30mm的内径、40mm的外径和7mm的轴向厚度的环。
磁体104经由固定器105附接到轴101。
导电目标103(也被称为“目标”)由0.2mm厚的金属板制成,并且被粘到或(注射)成型到磁体104。导电目标103具有单个齿,该齿沿其7mm的整个宽度对着磁体104的弯曲外表面,并且具有半个磁极的方位角尺寸(即围绕轴101覆盖22.5°的角度)。目标103的中心与多极磁体104的南北过渡(north-south transition)对准。在其他实施例中,目标可以移动11.25℃W或CCW,以使目标的上升沿或下降沿与多极磁体的NS过渡一致。
示出了具有等于2mm×1.5mm×0.75mm的示例性尺寸的两个传感器裸片106和107(也被称为“芯片”)(每个传感器裸片也被称为“传感器”或“传感器元件”)。
以与磁体104 1.5mm的径向间隙放置传感器裸片106和107。与磁体104的该径向间隙导致与目标103的径向间隙为1.3mm。在这种情况下,传感器裸片与磁体之间的径向间隙为1.5mm。
传感器裸片106和107具有两个不同的定向,这两个定向指示传感器裸片朝向磁体104的两个示例性定向。有利地,传感器裸片106和107两者以其重心在磁体104的中心平面中的方式被放置。因此,轴101的一些轴向游隙(play)可以不影响或仅有限地影响由裸片106和107检测的磁信号和感应信号的改变。
应当注意的是,对于多个用例场景,单个传感器裸片就足够了。还有一个选项是,在使用数个传感器裸片106和107的情况下,这些传感器裸片106和107可以具有朝向磁体104的相同定向。就此而言,图1的示例仅示出了两个传感器裸片106和107的一种可能的放置。
裸片106和107中的每个裸片可以包括磁传感器元件,该磁传感器元件对径向方向和切向方向上的磁场做出响应。
裸片107可以包括垂直霍尔效应器件和霍尔板,并且裸片106可以包括垂直霍尔效应器件或XMR。
裸片106和107两者可以包括用于感应传感器系统的激发和检测线圈。如果激发和检测线圈被放置在芯片的主表面上,则与由裸片106提供的信号相比,裸片107上的感应传感器具有较强的信号。
作为一个选项,裸片106在内部不具有感应线圈,而是在单独的芯片、基板或印刷电路板(PCB)上具有感应线圈。这可以导致包括磁传感器和感应传感器的传感器模块。有利地,线圈可以垂直于芯片的主表面布置,这减小了裸片焊盘(die paddle)中的涡电流,并且允许将XMR角度传感器与感应系统组合使用。
这种模块的另一个优点是可以使用大于芯片尺寸的线圈。还可以使用数目p2个导电目标,其中p2 应当注意的是,系统不一定需要裸片106和107两者。相反,对于一些用例,单个芯片可能就足够了。另一方面,将具有磁传感器元件的两个(或甚至更多个)芯片放置在磁体104周围的类似的气隙处可以改进检测能力和分辨率。 磁极对102的磁极102b的磁化可以主要径向向内地定向,而磁极102a的磁化可以主要径向向外地定向。 已知的是,在北/南过渡(在磁极102a和102b之间)附近,从径向向内平滑地弯曲到径向向外的弧形磁化改进了场模式,使得传感器元件处的径向场分量和切向场分量相对于方位角坐标正弦地变化。 备选地,磁极102a和102b的磁化可以主要在轴向上具有交替的符号。这提供了相对于方位角坐标正弦地变化的轴向场分量和切向场分量。在这种情况下,传感器可以有利地面对磁体的平坦表面,而不是面对磁体的弯曲表面,并且目标可以覆盖平坦表面。 图2从下方示出了图1的布置。应当注意的是,目标103可以连接到结构108;特别地,目标103和结构108可以被实现为单件。但是,在没有这种结构108的情况下,目标103可以耦合或连接(例如,粘附、安装等)到磁体104。
在另一个示例中,可以使用p2个导电目标,其中p2不同于磁极对p的数目,其中两者不具有公因子(common divisor)。 在示例性系统中,目标p2的数目可以等于p+1或p-1。在这种情况下,感应信号显示出周期性的波形,其中每转具有p2个周期。可以定义一个阈值,该阈值等于 (max+min)/2 其中max、min是该波形的最大值和最小值。 接下来,系统测量在 该延迟在整个旋转上单调地改变。在一些旋转角度(例如,180°)处没有延迟,并且对于接下来的180℃W(顺时针),感应信号可以逐渐超前于磁信号,并且对于稍小于360°的旋转角度,该超前可以稍小于180°。如果旋转开始于180°并且CCW(逆时针)进行,则感应信号会逐渐落后于磁信号,并且对于稍大于0°的旋转角度,该落后可以稍大于0°。 图3示出了具有p=4个磁极对和p2=5个感应目标203的示例性布置。除了目标203之外,图3对应于图1。 图4从下方示出了图3的布置,并且图5示出具有p2=5个感应目标203a、203b、203c、203d和203e的图3和图4的布置的平面俯视图。 应当注意的是,目标203a均等地覆盖N极和S极,而目标203e和目标203b与N极102a和S磁极102b之间的过渡对准。此外,目标203c和203d不均匀地覆盖N极和S极。在该示例中,所有目标203a至203d同样大,并且这些目标之间的缝隙在尺寸上也基本相等。但是,可以使用具有不同尺寸的目标和/或缝隙的其他实施例。 应当注意的是,目标203a至203e可以连接到结构208;特别地,目标203a至203e和结构208可以被实现为单件。作为备选,在没有这种结构208的情况下,目标203a至203e可以耦合或连接(例如,粘附、安装等)到磁体104。
图6示出了具有p=4个磁极对和p2=8个感应目标303的示例性布置。除了目标303之外,图6对应于图1。 在该示例中,目标与磁极一样多。磁体104具有p=4个磁极对和8个单磁极102a和102b。对于每个磁极,目标303被施加到磁体104。 目标303可以被成型到磁体104中,使得外部弯曲表面基本光滑。这可以导致包括目标303的磁体104的均匀(光滑)的外径。 磁体104的每个磁极具有一个目标。目标可以被对准为使得目标的边缘与磁极对的N极和S极之间的过渡一致。但是,目标的位置还可以被切向地移动。 由于放置了目标303,每个磁极的一半具有比磁极的另一半小的外径。这可能会导致气隙调制(airgap-modulation)和磁场的小的畸变(distortion)。如果导电目标在切线方向(CW或CCW)上移动磁极尺寸的四分之一,则磁场的这种畸变可以更加对称,这提高了磁性子系统的精度。
应当注意的是,在本文中示出和解释的实施例仅仅是示例,并且可以对应地使用目标和磁极(磁极对)的不同组合。特别地,一个选项是,将第一数目的目标施加到第二数目的磁极,其中第一数目可以不同于第二数目。 在一个示例性实施例中,单个(小的)目标可以与多个(例如,10个)磁极对(即20个磁极)组合使用。 另一个选项是具有与磁极对一样多的目标,其中每个目标可以与单个磁极对相关联(例如,目标可以覆盖磁极对的一部分)。 在又一个实施例中,使用相对于磁极对数目一半数目的目标。在这种情况下,每第二个磁极对可以(部分地)被目标覆盖。 在另外的实施例中,目标可以比磁极对数目多一个(或比磁极对数目少一个)。这允许在磁传感器信号和感应传感器信号中,以每转不同的完整周期数目应用所谓的“Nonius”原理。这两个信号的组合为从0°到360°的旋转位置给出了唯一的模式。 在另一个示例中,可以存在两倍于磁极对数目的目标。在特定的实施例中,每个目标可以覆盖单个磁极的尺寸的一半;目标可以被粘到磁体的外表面。 另一个选项是为单个偶极磁体提供数个目标。 还有一个选项是,磁体在尺寸上是小的,并且这种磁体被施加到目标上。在这种场景下,磁体可以指示0°位置,并且p2个目标可以允许检测角度360°/p2。
磁系统和感应系统均可以提供信号,分别被称为磁信号和感应信号。在一个示例性实施例中,可以比较这两个信号的零交叉:感应系统(在该示例中)每转可以仅具有两个零交叉(由于感应系统的单个目标),并且该零交叉可以标记0°基准位置,系统从该0°基准位置开始经由磁角度传感器对磁极对进行计数。 在断电之后,系统必须等待直至单个目标通过感应检测线圈,从而标记基准位置,并且使得系统知道其绝对角度位置。 在另一个实施例中,p2个目标和p个磁极对可以以如下关系被提供: p2=p±1 应当注意的是,p2个目标可以有利地均匀分布在磁体上。目标之间的缝隙的尺寸可以具有基本相同的大小。但是,一个选项是缝隙可以大于或小于目标。 系统可以将磁信号的零交叉的角度和感应信号的零交叉的角度进行比较。这些交叉对于0°重合。对于从0°到180°的正角度,感应零交叉逐渐超前,并且对于从0°到-180°的角度,感应零交叉逐渐落后。对于±180°,该超前/落后与一个磁极或一个感应目标一样大(以较小者为准)。 作为一个选项,可以使用在[M.Podhraski,J.Trontelj:A DifferentialMonolithically Integrated Inductive Linear Displacement MeasurementMicrosystem,Sensors 2016,16,394(www.mdpi.com/journal/sensors)]中描述的感应系统。 图7示出了包括磁角度701和感应角度702的一个示例性图(针对p=10个磁极和p2=11个目标)。这两个角度701和702可以被比较,并且这两个角度701和702的差异703是轴的全局位置(即,旋转角度)的函数。 可以以如下方式计算差异703: d=arctan2(cosα·cosβ+sinβ;sinα·cosβ-cosα·sinβ) 其中 α是磁角度, β是感应角度, arctan2是反正切函数,例如,在MS Excel 磁系统的每个磁极对覆盖360°/10=36°的角度,并且感应目标的周期(即,一个齿和一个缝隙)可以覆盖360°/11=32.73°的角度。
感应目标不必与磁传感器共享单个表面。相反,感应目标可以位于磁体的不同表面上。 图8示出了一种示例性布置,该示例性布置具有p=4个磁极对和位于磁体104的上表面上的感应目标803a、803b。 裸片106和107可以是面对磁体104的外圆筒表面的磁传感器设备。还提供了线圈801,该线圈801可以环绕轴101以覆盖感应目标803a的至少一部分。作为一个选项,线圈801可以被布置为使得线圈801与磁体104的上表面重叠。 线圈可以是拾波线圈(pick-up coil)或激发线圈,或者同时是这两种线圈。该线圈可以由具有几MHz的AC电能的传感器电路供电,这在目标上生成磁场,从而在目标中感应出涡电流。这些涡电流生成次级磁场,该次级磁场可以在拾波线圈中感应出电压。该电压可以由传感器电路直接检测,或者可以导致线圈阻抗的移动或线圈谐振频率的移动,这两种移动都可以由传感器电路检测。 相对于旋转轴101(和直接或间接地附接到轴101的旋转磁体104),线圈801是静止的。 线圈801具有两个端子,并且可以经由这些端子以AC电能来激励线圈801,并且还可以经由这些端子来分接(tap)感应到线圈801中的电压。因此,线圈801可以充当发送器和接收器。 其他实施例可以包括数个线圈,一个线圈用于生成初级AC磁场,并且两个线圈用于检测目标中由于涡电流引起的次级磁场。可以从后两个线圈中的信号中导出旋转位置。参考[Lin Ye,等人:"Nonlinearity Analysis and Parameters Optimization for anInductive Angle Sensor",ISSN 1424-8220,www.mdpi.com/journal/sensors,2014]。 线圈801可以由基板(例如,部件板或印刷电路板(PCB))支撑,为了较好的可见性,在图8中未示出基板。可以经由PCB上的导电路径来实现线圈801,该导电路径可以在单个层上,或者可以利用在PCB的至少一侧上的数个层和/或在PCB的两个表面之间的数个层。 应当注意的是,线圈801可以包括至少一个绕组。 还应当注意的是,线圈801可以不必以360°环绕整个轴;将线圈801放置为使得线圈801覆盖360°圆的一部分(例如仅90°)也可以是足够的。这简化了包括线圈801的PCB的安装,因为不需要将PCB布置在轴101之上;相反,PCB可以只是被放置在轴101附近。 一个选项是具有至少两个这种线圈,这两个线圈均可以覆盖围绕轴的360°范围的一部分,例如,两个PCB均具有线圈,并且PCB中的每个PCB覆盖围绕轴101的360°圆的90°的区域。 另一个选项是提供至少两个线圈,这两个线圈围绕轴101的旋转轴线彼此相对地旋转。例如,对于其他线圈也可以使用线圈801的曲折结构,其中两个线圈的曲折结构围绕旋转轴线相对于目标803b移动,例如,移动齿802的一半或移动一个齿802。在图8中未示出该第二线圈。 作为另一个选项,如关于图8中的齿802所示的,线圈801的曲折结构可以模仿感应目标803b的图案。 在图8中,感应目标803a、803b被示例性地布置成固定在磁体104之上的单个件。该单个件包括具有(在磁体之上的)延伸部803b的内环803a。还有一个选项是,没有内环结构803a,并且仅提供数个单个目标803b,例如被粘到磁体104之上。 当然,可以只存在单个目标803b,或者(多个)目标803b可以较小(或较大)。可以每个磁极对、每个单磁极或以独立于磁极对或单磁极的方式布置这些目标。 如图8中所示,感应目标803a、803b可以被放置在磁体104之上。感应目标803a、803b还可以被放置在磁体104的下方或以一定缝隙与磁体104相邻。在一个示例中,感应目标803a、803b和磁体104可以在轴101上彼此相邻地放置。 图8中示出的线圈801(和/或未图8中示出、但在上面描述的任何附加的线圈)可以以小的间隙放置在目标803a、803b旁边。 图9示出了一个示例性布置,该示例性布置具有p=4个磁极对和位于磁体104的上表面上的感应目标903。与图8中示出的实施例相反,感应目标903包括孔。(至少一个)线圈801(以较小的间距)位于感应目标903之上。线圈801可以是与关于图8描述的线圈相同的线圈或线圈结构。 根据另一个示例,(用作磁角度传感器的)裸片106和107可以与线圈801位于相同的基板(例如,PCB)上。在这种场景下,裸片面对磁体104的平坦的顶侧(或底侧)。 另一个示例是,至少一个线圈被集成在图3的裸片106和/或107中的一个裸片中。图10示出图3的摘录,其中裸片107具有线圈1001。文章[M.Podhraski,J.Trontelj:ADifferential Monolithically Integrated Inductive Linear DisplacementMeasurement Microsystem,Sensors 2016,16,394(www.mdpi.com/journal/sensors)]在图3和图5中示出了具有数个线圈的单个芯片。 线圈1001被绘制在裸片107的背离轴101的表面上。实际上,线圈1001可以被放置为靠近目标,并且特别地,线圈1001可以被定位为使得线圈1001面对磁体,目标指向旋转轴线。 可以以不同的方式实现线圈1001。例如,对于每个裸片107可以使用至少一个线圈或不止一个线圈。使用具有相似或相等的有效面积但具有相反绕组方向的线圈也是一个选项。这将允许抵消均匀的时变磁干扰。 关于裸片107a描述的内容同样适用于裸片106,特别地,至少一个线圈可以布置在裸片106中、裸片106上或裸片106处。 有利地,与目标的尺寸相比,线圈1001(或数个线圈,如果存在多个线圈的话)可以有利地相当大,因为这将导致较清楚的读数。还有一个选项是,将至少一个线圈放置在单独的基板上(例如,玻璃薄片或模块中的再分布层),该单独的基板可以不同于裸片107(或106),于是,裸片107(或106)可以被单独用作磁角度传感器。在这种情况下,磁角度传感器以及(单独的)线圈基板可以被组装在一个塑料封装件中。一个选项是将磁角度传感器粘到线圈基板上,反之亦然。另一个选项是将磁角度传感器和线圈基板两者都粘到另一个基板或引线框架上。 图11示出了类似于图8的示例性实施例;但是,图11的磁体1101仅具有包括磁极1101a和磁极1101b的一个磁极对(也被称为偶极磁体)。 磁化可以是径向的或轴向的,或者是两者的组合。在该示例中,感应部分是主系统,该主系统提供了具有高精度的角度读数,但角度度数又具有每转5个周期的周期性(基于图11中示出的示例,其中使用5个目标803b),并且(包括裸片106和107的)磁角度传感器通过允许区分目标803a/803b的第一周期、第二周期、第三周期、第四周期、第五周期来辅助测量。
应当注意的是,目标(也被称为导电目标或目标结构)可以是单个件,或者可以包括数个件(在这种情况下,每个件也可以被称为目标)。 导电目标不必附接到磁体;使导电目标与磁体连贯地旋转可能就足够了。这可以例如通过将磁体和目标固定到(共同的)轴上来实现。但是,有利的是,将磁体和目标两者附接在一起或附接到相同的固定器,这将提高这两者相对对准的精度(在0.1°至5°之间)。 优选地,目标可以具有高的电导率并且具有低的磁化率,即,目标的相对磁导率μ 目标可以是金属板,或者可以是粘到或喷涂到支撑结构或磁体本身上的一些带或涂层。由于感应传感器可以有利地在100kHz和100MHz之间、优选地在4MHz的频率下操作,因此激发线圈的AC场穿透目标的深度可以不超过趋肤深度的大约一到两倍。在铝中,在4MHz的频率下,趋肤深度为41μm。因此,目标厚度等于41μm可能就足够了。但是,出于可制造性、机械稳定性或电磁系统的二阶效应(例如,相对于位置和气隙的变化,角度误差的变化较小)的原因,可以选择较厚的目标。 可以使用刚性金属作为目标,并且可以将该目标用作磁体的机械固定装置。例如,目标可以具有环绕磁体的部分,以便增加在高转速下或在较高温度下的机械稳定性。 磁体可以是注塑铁氧体。这是获得具有强磁场的磁体的具有成本效益的方法。磁体的电导率可以是差的。在这种情况下,磁体可能无法从感应系统的AC场中吸收太多的功率。优选地,磁体的形状是旋转对称的,使得稍微导电的磁体的旋转不会在感应系统的拾波线圈中感应出不想要的信号。 目标可以被接合到磁体上,使得该复合物的表面具有不平坦的结构。还有一个选项是将磁体围绕目标注射成型以获得光滑且均匀的表面。 感应系统可以包括差动线圈。例如,感应系统可以包括具有相同匝数-面积(即,匝数和每匝面积的乘积)的两个线圈子系统,这两个子系统串联连接,但是一个子系统相对于另一个子系统被翻转并且被放置在旁边,使得均匀的交流(AC)磁场不会在整个线圈系统中感应出任何信号。与非差动线圈相比,差动线圈具有较低的电磁发射。 感应系统可以以具有在从1kHz到1000MHz的AC频率的信号运行。可以选择信号,以使信号与集成电路技术(例如,硅CMOS技术)中的电容和线圈的参数匹配。AC的信号可以是正弦波,或者可以是脉冲形的。频率可以是固定的,或者可以周期性地改变或根据(伪)随机模式改变。 如果磁传感器和感应子系统包括用于信号调节、校准和角度计算的电路,则该系统变得特别具有成本效益。使用标准CMOS硅技术将这些电路实现在单个芯片/裸片中可以是特别有利的。该芯片还可以包括存储器,以存储例如磁极对的数目p和/或目标的数目p2。 在这种集成系统中,感应系统可以检测目标与传感器芯片之间的间隔(间隙、气隙)。关于间隔的该信息可以用于校准磁角度传感器,因为磁角度和/或磁场的大小可以根据磁体和磁场感测元件之间的间隔而改变。 可以通过磁角度传感器检测其他距离(例如,磁体和目标相对于旋转轴线的偏心距(eccentricity)),并且该信息可以用于校准感应角度传感器。这可以有利于适配永磁体,以使永磁体对一些未对准或位置/组装误差更敏感:这是特别有利的,如果磁系统辅助例如获得360°唯一性,但是不需要较高的精确度。在这种情况下,磁系统充当用于感应系统(该感应系统在该示例中充当主系统)的辅助系统。因此,磁系统可以用于粗略地感测角度,以及用于确定组装误差,以便校准感应(主)系统。当然,感应系统和磁系统的角色也可以颠倒。 在确定基准角度之后,可以关闭感应子系统。这可以由整个(主)系统触发。利用已知的基准角度,可以计算出磁角度传感器的整个360°信号周期。在检测到过度的电磁干扰之后,可以重新激活感应子系统,以确保计数器不会丢失任何脉冲。 应当注意的是,磁系统和感应系统的角色(主系统和辅助(附属)系统)可以互换。 在一个示例性实施例中,没有引线框架或其他大的导电裸片焊盘的封装件可以用于提高感应子系统对导电目标的灵敏度,特别是在激发线圈和/或拾波线圈位于裸片上的情况下。裸片焊盘可以具有切口、狭缝或孔,它们可以具有叉状的形状,以避免在裸片焊盘本身中感应出大的涡电流回路。 有利地,所有传感器元件、线圈和电路装置可以被部署在单个芯片或少量芯片上。单个芯片或少量芯片可以被布置在单个封装件中。特别有利的是,(多个)线圈和磁角度传感器彼此非常接近。这允许来自磁体的信号与来自(感应)目标的信号之间的适当的相关性。 感应系统可以包括至少一个激发线圈和至少一个检测线圈。这些激发线圈和检测线圈可以被实现为单独的线圈,或者它们可以被实现为至少一个(共同的)线圈。 目标可以包括普通的金属件,该普通的金属件可以是块状的或金属壳或金属箔。目标可以具有图案,特别地,可以蚀刻或冲压出该图案。 目标可以是线圈,该线圈包括具有至少一个回路的至少一个导线和/或包括具有至少一个回路的至少一个导电路径。目标可以包括开放或闭合的螺旋/回路。在开放的螺旋或回路的情况下,可以在开放的端部之间电连接电阻器或电容器。这种连接可以用于调整目标和(多个)线圈之间的互感耦合的频率特性(带宽、谐振频率、品质因数或谐振)。 应当注意的是,磁传感器原理和感应传感器原理的组合是有利的,因为这两种原理都使用磁场:磁场的静态部分用于磁原理,并且磁场的时变部分用于感应原理。这两种原理对于例如油、油脂、湿气或灰尘而言都相当鲁棒。 磁体、特别是多极磁体具有数个表面,例如平坦轴向端面以及弯曲的内外周缘表面。磁极可以位于这些面中的任何一个面中。传感器可以被定位在任何表面的对面,优选地以较小的间隙(距表面的距离)被定位。导电目标可以位于该优选的表面处或位于该优选的表面附近。 电机的轴通常主要受到轴向游隙的影响,并且受到径向游隙的影响较小。因此,可以使用弯曲的(外或内)表面来代替磁体环和目标环的平坦轴向端面。磁极和(多个)目标位于磁体环和目标环的圆筒表面中。磁体的磁极与(多个)目标的边缘之间的边界可以优选地平行于旋转轴线,即,每个边界与特定的方位角相关联,而不与较宽的方位角范围相关联,以使轴向游隙不移动边界的旋转位置。 尽管已经公开了本发明的各种示例性实施例,但是对于本领域技术人员明显的是,可以在不脱离本发明的精神和范围的情况下,进行各种改变和修改,这些改变和修改将实现本发明的优点中的一些优点。对于本领域技术人员明显的是,执行相同功能的其他部件可以被适当地替换。应当提到的是,即使在没有明确提及的情况下,参考特定附图解释的特征也可以与其他附图的特征组合。此外,可以使用适当的处理器指令,在所有软件实施方式中实现本发明的方法,或者在利用硬件逻辑和软件逻辑的组合来实现相同结果的混合实施方式中实现本发明的方法。对本发明构思的这种修改旨在由所附权利要求覆盖。
- 转速和/或旋转角度感测单元和工作设备
- 旋转角度的感测