一种投料装置及炒菜机器人
文献发布时间:2023-06-19 09:38:30
技术领域
本发明属于自动烹饪领域,尤其涉及一种投料装置及炒菜机器人。
背景技术
随着人们生活水平提高、技术的进步,炒菜机器人逐渐广泛应用,包括家庭、餐馆、饭堂等场合。目前的炒菜机器人可以进行各种操作,如:加料、翻炒、洗锅等功能,基本上可以模拟人工进行烹饪。
炒菜机器人在炒制的过程中,需要不同时间段点上加入合适的主食材和各种配食材,现有的投料方式是采用料盒,在长方形料盒上分隔出多个料仓,依次将各个料仓中的食材加入到炒菜机器人的锅具中。但是,采用料盒形式,需要较大的空间进行推动料盒的操作。
为解决上述问题,出现了环形投料的方式,具体是将各种食材呈环形排列,再通过各自的驱动依次将各种食材投放到锅具中。但是,这种投料方式,需要多个驱动电机,且需要分别控制各个驱动电机的工作状态(开启时间、转速等),成本高,且控制复杂。
发明内容
本发明实施例提供一种投料装置,旨在解决现有的环形投料装置需要多个电机驱动的问题。
本发明实施例是这样实现的,一种投料装置,包括:
基座;
多个料斗组件;
设置在所述基座底面下方的转盘,所述转盘顶面设置有凸缘;
驱动所述转盘转动的电机;
所述料斗组件包括:
设置在所述基座顶面的连杆机构;
与所述连杆机构连接的料斗,所述料斗可由所述连杆机构驱动以翻转或复位;
可驱动所述连杆机构正向运动的活动臂,所述活动臂一端抵靠所述转盘顶面设置有所述凸缘的圆周上,另一端抵靠所述连杆机构;
驱动所述连杆机构反向运动回复到初始位置的复位机构。
更进一步地,所述连杆机构包括:
设置在所述基座顶面的支架;
一端与所述支架靠近所述基座一端转动连接的第一连杆,所述活动臂抵靠所述第一连杆底部;
第一端与所述支架远离所述基座一端转动连接的料斗柄,所述料斗柄第二端固定连接所述料斗;
一端与所述料斗柄第二端转动连接,另一端与所述第一连杆另一端转动连接的第二连杆。
更进一步地,所述复位机构包括与所述连杆机构一一对应的多个扭簧,所述扭簧第一端抵靠所述支架,第二端抵靠所述料斗柄顶面。
更进一步地,所述活动臂为升降杆,所述基座上设置有供所述升降杆穿过的多个导槽,多个所述导槽呈圆周排布。
更进一步地,所述凸缘设置在转盘上与所述导槽相对应的圆周上。
更进一步地,所述凸缘呈倒V字型,且与所述转盘顶面圆弧过度连接。
更进一步地,所述活动臂两端设置有转轮。
更进一步地,所述基座底面设置有位控检测开关。
更进一步地,所述位控检测开关为红外光耦或磁性传感器,所述转盘顶面设置有隔断位控检测开关信号的凸出环,所述凸出环上开设有与所述料斗组件一一对应的多个缺口。
更进一步地,所述转盘周缘设置有第一齿轮,所述电机的输出轴上设置有与所述第一齿轮啮合的第二齿轮。
本发明实施例还提供一种炒菜机器人,包括机架、设置在所述机架上的如上所述的投料装置及设置在所述投料装置下方的锅具。
本发明实施例通过设置驱动料斗翻转或复位的连杆机构,再在转盘上设置凸缘,并通过一个电机驱动转盘及凸缘转动,在凸缘转动过程中,可依次使各个活动臂向上运动,从而使各个驱动连杆机构正向运动,进而实现料斗的翻转,再通过设置复位机构,使连杆机构反向运动回复到初始位置,进而实现料斗的复位,本发明通过一个电机,实现多个料斗的翻转或复位,成本低,且只需要控制一个电机的工作状态,控制程序简单,便于操作。
附图说明
图1是本发明实施例提供的初始位置立体结构图;
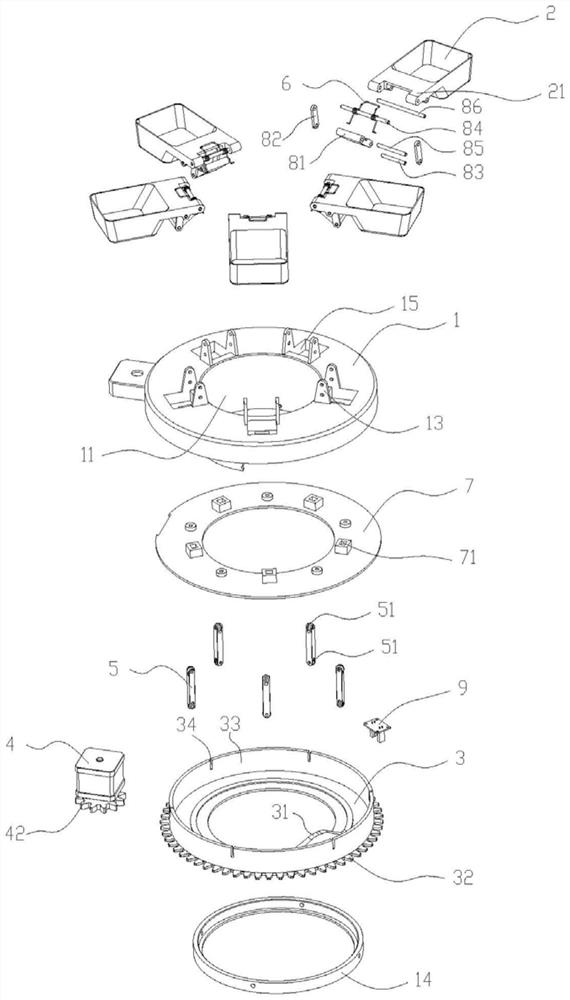
图2是图1的爆炸结构图;
图3是本发明实施例提供的内部结构图;
图4是本发明实施例提供的初始位置结构示意图;
图5是本发明实施例提供的倒料位置结构示意图;
图6是本发明实施例提供的工作原理示意图;
图7是本发明实施例提供的倒料位置立体结构图。
图中,1、基座;11、送料腔;12、环槽;13、支架;14、固定环;15、通孔;2、料斗;21、料斗柄;3、转盘;31、凸缘;32、第一齿轮;33、凸出环;34、缺口;4、电机;41、第二齿轮;5、活动臂;51、转轮;6、复位机构;7、导槽座;71、导槽;81、第一连杆;82、第二连杆;83、第一轴;84、第二轴;85、第三轴;86、第四轴;9、位控检测开关。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
本发明在所述基座顶面设置连杆机构,驱动料斗翻转或复位;设置在所述基座底面下方的转盘,所述转盘顶面设置有凸缘;可驱动所述连杆机构正向运动的活动臂,所述活动臂一端抵靠所述转盘顶面设置有所述凸缘的圆周上,另一端抵靠所述连杆机构;再设置复位机构驱动所述连杆机构反向运动回复到初始位置。本发明实施例通过设置驱动料斗翻转或复位的连杆机构,再在转盘上设置凸缘,并通过一个电机驱动转盘及凸缘转动,在凸缘转动过程中,可依次使各个活动臂向上运动,从而使各个驱动连杆机构正向运动,进而实现料斗的翻转,再通过设置复位机构,使连杆机构反向运动回复到初始位置,进而实现料斗的复位,本发明通过一个电机,实现多个料斗的翻转或复位,成本低,且只需要控制一个电机的工作状态,控制程序简单,便于操作。
如图1-图7所示,本发明实施例提供一种投料装置,包括:
基座1;
多个料斗2组件;
设置在所述基座1底面下方的转盘3,所述转盘3顶面设置有凸缘31;
驱动所述转盘3转动的电机4;
所述料斗2组件包括:
设置在所述基座1顶面的连杆机构;
与所述连杆机构连接的料斗2,所述料斗2可由所述连杆机构驱动以翻转或复位;
可驱动所述连杆机构正向运动的活动臂5,所述活动臂5一端抵靠所述转盘3顶面设置有所述凸缘31的圆周上,另一端抵靠所述连杆机构;
驱动所述连杆机构反向运动回复到初始位置的复位机构6。
多个活动臂及凸缘设置在同一圆周上,转盘转动时,多个活动臂可依次从凸缘弧面经过。
其中,活动臂可以是升降杆,也可以是凸轮、偏心轮等。
多个活动臂5及凸缘31设置在同一圆周上,转盘3转动时,多个活动臂5可依次从凸缘31弧面经过。
其中,活动臂5可以是升降杆,也可以是凸轮、偏心轮等。
当活动臂5为凸轮或偏心轮时,活动臂5可转动的安装在基座1上,且其远端抵靠转盘3顶面,近端抵靠连杆机构。凸轮或偏心轮从凸缘31弧面经过时,在凸缘31的作用下,凸轮或偏心轮转动,凸轮或偏心轮抵靠转盘3由远端逐渐移向近端,凸轮或偏心轮抵靠凸缘31底部时,其远端抵靠凸缘31底部,近端抵靠连杆机构,凸轮或偏心轮抵靠凸缘31顶部时,其近端抵靠凸缘31顶部,远端抵靠连杆机构,凸轮或偏心轮从转盘3顶面沿凸缘31的斜面逐渐向上移动,并驱动连杆机构正向运动,直至凸轮或偏心轮到达凸缘31的顶部,投料装置此时处于倒料位置。
当活动臂5为升降杆时,所述基座1上设置有供所述升降杆穿过的多个导槽71,多个所述导槽71呈圆周排布。
为了方便说明,本发明后续的实施例中,如无特别说明,活动臂5均以升降杆为例进行说明。
具体地,导槽71为穿过该基座1的通槽,导槽71的尺寸略大于活动臂5的外部尺寸,使活动臂5可以在导槽71内沿导槽71方向顺畅的上下活动。
在本发明的一个可选实施例中,如图1所示,导槽71也可以设置在导槽71座7上,基座1上设置有避位导槽71的通孔15,导槽71座7安装在基座1上,使导槽71仍穿过基座1。导槽71是直接由基座1穿孔加工而成还是分体设置后再组装在一起,是等同的技术方案,在此不做限定。
基座1中部设置有圆形或正多边形、且两端开口的送料腔11,料斗2沿送料腔11的周边设置,料斗2可朝送料腔11翻转,将料斗2的食材从送料腔11倒入到炒菜机器人的锅具中。
转盘3可转动的安装在基座1上。具体地,送料腔11外侧壁上设置圆形的环槽12,环槽12截面呈L型,将转盘3套设在环槽12上,再将固定环14套在环槽12上并固定安装在基座1上,使转盘3夹持在环槽12的侧壁与固定环14之间,且使转盘3与环槽12的侧壁或固定环14之间留有少量的间隙,从而使转盘3转动时摩擦力小。
导槽71设置在基座1上且呈圆周排布,该圆周的圆心与转盘3的转动中心重合。
转盘3周缘设置有第一齿轮32,所述电机4的输出轴上设置有与所述第一齿轮32啮合的第二齿轮41。电机4通过啮合的第一齿轮32与第二齿轮41,带动转盘3转动。电机4可以设置在转盘3的旁侧,即料斗2下方,电机4安装方便,且可节约空间。电机4带动转盘3转动,还可以采用带传动、链传动等。
本发明中,导槽71、活动臂5、连杆机构和料斗2的数量均相等,且一一对应。连杆机构设置在导槽71端部外侧。本发明用一个电机4驱动,实现多个料斗2的翻转或复位,导槽71、活动臂5、连杆机构和料斗2的数量可以根据菜品的种类进行增加或减少,方便灵活,有利于后期的升级或改造。
凸缘31为转盘3顶面的凸起结构,凸缘31设置在转盘3上与导槽71相对应的圆周上,既转盘3转动时,凸缘31呈圆周轨迹移动,移动过程中可以与任一导槽71相对齐,活动臂5可以为一直线型的长杆,此形状的活动臂5加工简单,且可采用棒材制作。如果凸缘31不设置在转盘3上与导槽71相对应的圆周上,则需要将活动臂5上做一弯折处理,使凸缘31在转动过程中,活动臂5抵靠转盘3的一端可与凸缘31相互作用。
凸缘31的具体形状可以是倒V字型,且与所述转盘3顶面圆弧过度连接。
如图4-图6所示,凸缘31呈圆周轨迹移动过程中,活动臂5抵靠转盘3的一端与凸缘31相互作用,并在导槽71的限位作用下,活动臂5从转盘3顶面沿凸缘31的斜面逐渐向上移动,并驱动连杆机构正向运动,直至活动臂5到达凸缘31的顶部,投料装置处于倒料位置,此时,料斗2在连杆机构正向运动的作用下,已完成翻转动作,将料斗2的食材倒出。其中,活动臂5从转盘3顶面沿凸缘31的斜面逐渐向上移动时,需要克服料斗2和连杆机构的重力及复位机构6的阻力;活动臂5处于凸缘31的顶部时,料斗2处于完全翻倒状态。然后,活动臂5从凸缘31的顶部沿凸缘31的斜面逐渐向下移动,此时,在复位机构6的作用下,连杆机构反向运动回复到初始位置,进而使料斗2也复位,回复到初始位置,投料装置处于初始位置。活动臂5从凸缘31的一侧经过凸缘31的全过程,为一个料斗2完成一次投料的一个完整过程。转盘3转动一整圈,该投料装置的所述料斗2均完成一次投料。
本发明实施例通过设置驱动料斗2翻转或复位的连杆机构,再在转盘3上设置凸缘31,并通过一个电机4驱动转盘3及凸缘31转动,在凸缘31转动过程中,可依次使各个活动臂5向上运动,从而使各个驱动连杆机构正向运动,进而实现料斗2的翻转,再通过设置复位机构6,使连杆机构反向运动回复到初始位置,进而实现料斗2的复位,本发明通过一个电机4驱动,实现多个料斗2的翻转或复位,成本低,且只需要控制一个电机4的工作状态,控制程序简单,便于操作。
如图2-图6所示,本发明的一个可选实施例中,所述连杆机构包括:
设置在所述基座1顶面的支架13;
一端与所述支架13靠近所述基座1一端转动连接的第一连杆81,所述活动臂5抵靠所述第一连杆81底部;
第一端与所述支架13远离所述基座1一端转动连接的料斗柄21,所述料斗柄21第二端固定连接所述料斗2;
一端与所述料斗柄21第二端转动连接,另一端与所述第一连杆81另一端转动连接的第二连杆82。
具体地,料斗柄21和料斗2可以是一个整体。
该支架13设置有两个,且以导槽71为中心对称设置,在支架13上设置两个转轴,靠近基座1的转轴为第一轴83,支架13与第一连杆81通过第一轴83转动连接,远离基座1的转轴为第二轴84,支架13与料斗柄21通过第二轴84转动连接。
第二连杆82与第一连杆81之间通过第三轴85转动连接,第二连杆82与料斗柄21之间通过第四轴86转动连接。
第一连杆81和第二连杆82也可以是连接板,具体形式在此不做限定。
连杆机构初始状态时,第一连杆81与第二连杆82连接的一端向下倾斜,活动臂5抵靠在第一连杆81远离第一轴83的一端侧面,活动臂5上下活动时,第一连杆81绕第一轴83转动。
如图3所示,本发明中,连杆机构正向运动是指第一连杆81绕第一轴83顺时针转动,连杆机构反向运动是指第一连杆81绕第一轴83逆时针转动,连杆机构正向运动与连杆机构反向运动方向相反。
凸缘31呈圆周轨迹移动过程中,活动臂5抵靠转盘3的一端与凸缘31相互作用,并在导槽71的限位作用下,活动臂5从转盘3顶面沿凸缘31的斜面逐渐向上移动,且驱动连杆机构的第一连杆81绕第一轴83向上(顺时针)运动,从而推动第二连杆82及料斗柄21正向运动,进而推动料斗2做翻转运动,直至活动臂5到达凸缘31的顶部,此时,料斗2在连杆机构正向运动的作用下,逐渐完成翻转动作,将料斗2的食材倒出。其中,活动臂5从转盘3顶面沿凸缘31的斜面逐渐向上移动时,需要克服料斗2和连杆机构的重力及复位机构6的阻力;活动臂5处于凸缘31的顶部时,料斗2处于完全翻倒状态。然后,活动臂5从凸缘31的顶部沿凸缘31的斜面逐渐向下移动,此时,在复位机构6的作用下,连杆机构的料斗柄21绕第二轴84向下运动,且驱动连杆机构的第一连杆81绕第一轴83向下(逆时针)运动,使连杆机构反向运动回复到初始位置,进而使料斗2也复位,回复到初始位置。活动臂5从凸缘31的一侧经过凸缘31的全过程,为一个料斗2完成一次投料的一个完整过程。转盘3转动一整圈,该投料装置的所述料斗2均完成一次投料。
本发明实施例由支架13、料斗柄21、第一连杆81和第二连杆82组成连杆机构,使料斗2可以在连杆机构的驱动下翻转或复位。
如图2-图6所示,本发明的一个可选实施例中,所述复位机构6包括与所述连杆机构一一对应的多个扭簧,所述扭簧第一端抵靠所述支架13,第二端抵靠所述料斗柄21顶面。扭簧可以是单扭簧,也可以是双扭簧,扭簧的中部套设在第二轴84上。扭簧的数量与连杆机构的数量相同。连杆机构在活动臂5的作用下正向运动时,扭簧扭转,储存能量,当活动臂5的作用力消失后,扭簧释放能量回复,使连杆机构反向运动,进而使料斗2复位。扭簧为成熟产品,且安装方便,并且可以根据需要选择合适弹力的扭簧,方便灵活,成本低。
当然,复位机构6还可以是其它形式的机构,例如,复位机构6可以是拉伸弹簧,其一端连接料斗柄21的底部,另一端连接基座1的顶部,连杆机构在活动臂5的作用下正向运动时,拉伸弹簧被拉伸,当活动臂5的作用力消失后,被拉伸的拉伸弹簧弹性回复,使连杆机构反向运动,进而使料斗2复位。
如图2-图5所示,本发明的一个可选实施例中,活动臂5为升降杆时,所述活动臂5两端设置有转轮51。活动臂5抵靠转盘3一端设置转轮51,使活动臂5可以通过转轮51与转盘3相抵靠,转盘3转动时,可以减少活动臂5与转轮51之间的摩擦力,使转盘3转动更顺畅,受到的阻力更少。活动臂5抵靠连杆机构的第一连杆81一端设置转轮51,使活动臂5可以通过转轮51与第一连杆81侧面相抵靠,既可以减少活动臂5与第一连杆81侧面的摩擦力,又不影响活动臂5推动第一连杆81绕第一轴83转动。
如图2所示,本发明的一个可选实施例中,所述基座1底面设置有位控检测开关9。位控检测开关9用于检测料斗2是否处于倒料位置状态,即检测活动臂5是否到达凸缘31的顶部,当位控检测开关9检测到料斗2处于倒料位置状态时,控制器可以控制电机4停止工作一段时间,使料斗2内的食材全部倒出,防止料斗2内有食材残留。
具体地,所述位控检测开关9为红外光耦、磁性传感器或其它具有相同功能的传感器,所述转盘3顶面设置有隔断位控检测开关9信号的凸出环33,所述凸出环33上开设有与所述料斗组件一一对应的多个缺口34。
更进一步地,多个导槽71等间距的呈圆周排布,凸出环33上的缺口34也是等间距设置。
当采用红外光耦作为位控检测开关9时,凸出环33延伸至红外光耦的红外发射管与红外接收管之间,位控检测开关9固定在基座1上,转盘3转动过程中,当红外光耦的红外发射管与红外接收管之间是缺口34时,红外接收管可以接收到红外发射管的信号,此时检测到料斗2处于翻转倒料状态,控制器可以控制电机4停止工作一段时间,使料斗2内的食材全部倒出;当红外光耦的红外发射管与红外接收管之间是凸出环33时,红外发射管发出的信号被凸出环33遮挡,红外接收管无法接收到信号,此时,凸出环33隔断了位控检测开关9的信号,控制器控制电机4正常工作。磁性传感器原理相同,区别在于凸出环33采用隔磁材料制成,在此不再赘述。
本发明实施例还提供一种炒菜机器人,包括机架、设置在所述机架上的如上所述的投料装置及设置在所述投料装置下方的锅具。
本发明中,可以将锅具和投料装置基座安装在支架上,锅具设置在送料腔的正下方,料斗朝送料腔翻转,可将料斗的食材从送料腔倒入到炒菜机器人的锅具中。
本发明实施例通过设置驱动料斗翻转或复位的连杆机构,再在转盘上设置凸缘,并通过一个电机驱动转盘及凸缘转动,在凸缘转动过程中,可依次使各个活动臂向上运动,从而使各个驱动连杆机构正向运动,进而实现料斗的翻转,再通过设置复位机构,使连杆机构反向运动回复到初始位置,进而实现料斗的复位,本发明通过一个电机驱动,实现多个料斗的翻转或复位,成本低,且只需要控制一个电机的工作状态,控制程序简单,便于操作。本发明通过设置位控检测开关检测料斗是否处于翻转倒料状态,即检测活动臂是否到达凸缘的顶部,当位控检测开关检测到料斗处于翻转倒料状态时,控制器可以控制电机停止工作一段时间,使料斗内的食材全部倒出,防止料斗内有食材残留。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种投料装置及炒菜机器人
- 一种智能炒菜机器人料盒投料回收装置