一种蟑螂位置信息采集装置
文献发布时间:2023-06-19 09:38:30
技术领域
本发明涉及一种蟑螂位置信息采集装置,主要涉及信息采集技术领域。
背景技术
蟑螂,泛指属于“蜚蠊目”的昆虫,蟑螂携带多种病原体,但一般认为病原体在它们体内不能繁殖,属于机械性传播媒介,然而由于它们的侵害面广、食性杂,既可在垃圾、厕所、盥洗室等场所活动,又可在食品上取食,因而它们引起肠道病和寄生虫卵的传播不容忽视,要想彻底消灭蟑螂,必须找到巢穴,把卵消灭,但是蟑螂的巢穴一般都在较隐蔽的位置,普通方法难以找到蟑螂的巢穴,针对上述缺点,本发明进行了改进。
发明内容
本发明要解决的技术问题是提供一种蟑螂位置信息采集装置,克服了上述的问题。
本发明是通过以下技术方案来实现的。
本发明的一种蟑螂位置信息采集装置,包括壳体以及设置于所述壳体中的内腔,所述内腔右端转动设有连接合页,所述连接合页上固定设有侧盖板,所述侧盖板能绕所述连接合页转动,所述壳体中设有感应腔,所述感应腔底端固定共设有距离传感器,所述感应腔中设有感应弹簧,所述感应弹簧上端固定连接有感应滑板,当蟑螂位于所述感应滑板上侧时会导致所述感应滑板向下移动非常小的距离,所述距离传感器能检测到距离的变化,所述壳体中设有驱动腔,所述驱动腔底端固定设有电磁铁,当所述距离传感器发出信号后所述电磁铁进行通电,所述驱动腔中设有复位弹簧,所述复位弹簧上端固定连接有滑块,所述滑块上端固定设有压力传感器,所述压力传感器能检测到蟑螂在所述压力传感器上的具体位置,所述滑块左端固定设有动力齿条,所述壳体中设有传动腔,所述传动腔底端转动设有两根转轴,所述转轴上固定设有变向齿轮,两个所述变向齿轮互相啮合,右侧的所述变向齿轮和所述动力齿条啮合,左侧的所述变向齿轮啮合有传动齿条,所述传动齿条左端固定连接有连杆,所述连杆和所述传动腔底端之间设有弹簧,当所述滑块向下移动时通过两个所述变向齿轮的传动会带动所述连杆向下移动,所述连杆上端下侧通过螺纹连接有上罩,所述上罩中设有工作腔,所述工作腔中转动设有夹紧螺纹杆,所述夹紧螺纹杆上左右对称螺纹连接有夹紧侧板,所述夹紧螺纹杆启动后能驱动两侧的所述夹紧侧板互相靠近或远离,所述工作腔顶端固定设有电动滑轨,所述电动滑轨下侧滑动设有工作壳体,所述工作壳体和所述电动滑轨中的滑块固定连接,所述工作壳体中设有腔体,所述腔体顶端固定设有工作块,所述工作块中设有储存腔,所述储存腔中储存有五枚固定针,所述储存腔右端固定设有送料弹簧,所述送料弹簧左端固定连接有推板,所述储存腔顶端固定设有发射弹簧,所述发射弹簧下端固定连接有电磁铁,所述电磁铁通电后能吸附所述固定针,所述电磁铁上端固定连接有拉绳,所述腔体上端固定设有收纳壳体,所述收纳壳体中储存有五个信号发射器,所述信号发射器依靠摩擦力固定在所述收纳壳体中,所述信号发射器右端通过连接绳和所述固定针连接,所述上罩中设有卷线腔,所述夹紧螺纹杆右端位于所述卷线腔中,所述夹紧螺纹杆右端固定设有卷线筒,所述卷线筒上缠绕有所述拉绳,所述卷线筒转动后能拉动所述电磁铁向上移动并压缩所述发射弹簧。
进一步的,所述上罩中设有动力腔,所述动力腔中固定设有动力电机,所述动力电机的动力轴上固定设有动力齿轮,所述夹紧螺纹杆左端固定设有传动齿轮,所述传动齿轮和所述动力齿轮啮合。
进一步的,所述滑块上侧放置有诱饵,所述诱饵用于引诱蟑螂进入所述内腔中。
进一步的,所述壳体中固定设有侧盖电机,所述侧盖电机的动力轴上固定设有拉绳卷线筒,所述拉绳卷线筒上缠绕有侧盖拉绳,所述侧盖拉绳下端和所述侧盖板固定连接,所述侧盖电机启动后能带动所述拉绳卷线筒缠绕所述侧盖拉绳并拉动所述侧盖板绕所述连接合页转动。
本发明的有益效果:本发明中设置有用于引诱蟑螂的诱饵,当蟑螂被诱饵吸引进入本装置后会先触发距离传感器给电磁铁通电,之后蟑螂会被本装置捕捉在一个壳体中,并且两边的单边会将蟑螂夹紧在中间位置,之后装置会利用弹簧的弹力将一根针插入蟑螂身体,由于针非常细因此蟑螂不会立刻死亡,而会拖着针行走,针的末端通过一根连接线连接着一个信号发射器,一段时间后蟑螂回到巢穴,使用者通过手机等信号接收装置即能找到蟑螂巢穴的位置,之后将巢穴除去即能彻底消灭蟑螂。
附图说明
为了更清楚地说明发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
下面结合附图和实施例对本发明进一步说明。
图1是本发明的整体结构示意图;
图2是图1中A的放大结构示意图;
图3是图1中B的放大结构示意图。
具体实施方式
下面结合图1-3对本发明进行详细说明,其中,为叙述方便,现对下文所说的方位规定如下:下文所说的上下左右前后方向与图1本身投影关系的上下左右前后方向一致。
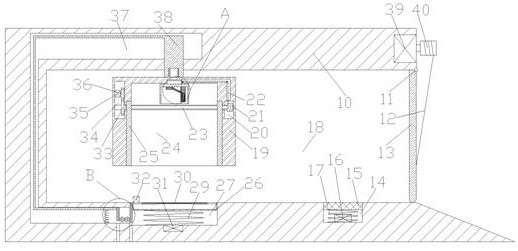
结合附图 1-3所述的一种蟑螂位置信息采集装置,包括壳体10以及设置于所述壳体10中的内腔18,所述内腔18右端转动设有连接合页11,所述连接合页11上固定设有侧盖板13,所述侧盖板13能绕所述连接合页11转动,所述壳体10中设有感应腔14,所述感应腔14底端固定共设有距离传感器16,所述感应腔14中设有感应弹簧17,所述感应弹簧17上端固定连接有感应滑板15,当蟑螂位于所述感应滑板15上侧时会导致所述感应滑板15向下移动非常小的距离,所述距离传感器16能检测到距离的变化,所述壳体10中设有驱动腔27,所述驱动腔27底端固定设有电磁铁31,当所述距离传感器16发出信号后所述电磁铁31进行通电,所述驱动腔27中设有复位弹簧29,所述复位弹簧29上端固定连接有滑块26,所述滑块26上端固定设有压力传感器30,所述压力传感器30能检测到蟑螂在所述压力传感器30上的具体位置,所述滑块26左端固定设有动力齿条55,所述壳体10中设有传动腔37,所述传动腔37底端转动设有两根转轴53,所述转轴53上固定设有变向齿轮54,两个所述变向齿轮54互相啮合,右侧的所述变向齿轮54和所述动力齿条55啮合,左侧的所述变向齿轮54啮合有传动齿条56,所述传动齿条56左端固定连接有连杆38,所述连杆38和所述传动腔37底端之间设有弹簧57,当所述滑块26向下移动时通过两个所述变向齿轮54的传动会带动所述连杆38向下移动,所述连杆38上端下侧通过螺纹连接有上罩19,所述上罩19中设有工作腔24,所述工作腔24中转动设有夹紧螺纹杆23,所述夹紧螺纹杆23上左右对称螺纹连接有夹紧侧板25,所述夹紧螺纹杆23启动后能驱动两侧的所述夹紧侧板25互相靠近或远离,所述工作腔24顶端固定设有电动滑轨52,所述电动滑轨52下侧滑动设有工作壳体58,所述工作壳体58和所述电动滑轨52中的滑块固定连接,所述工作壳体58中设有腔体59,所述腔体59顶端固定设有工作块46,所述工作块46中设有储存腔41,所述储存腔41中储存有五枚固定针42,所述储存腔41右端固定设有送料弹簧43,所述送料弹簧43左端固定连接有推板44,所述储存腔41顶端固定设有发射弹簧45,所述发射弹簧45下端固定连接有电磁铁47,所述电磁铁47通电后能吸附所述固定针42,所述电磁铁47上端固定连接有拉绳22,所述腔体59上端固定设有收纳壳体51,所述收纳壳体51中储存有五个信号发射器49,所述信号发射器49依靠摩擦力固定在所述收纳壳体51中,所述信号发射器49右端通过连接绳48和所述固定针42连接,所述上罩19中设有卷线腔20,所述夹紧螺纹杆23右端位于所述卷线腔20中,所述夹紧螺纹杆23右端固定设有卷线筒21,所述卷线筒21上缠绕有所述拉绳22,所述卷线筒21转动后能拉动所述电磁铁47向上移动并压缩所述发射弹簧45。
有益地,所述上罩19中设有动力腔34,所述动力腔34中固定设有动力电机35,所述动力电机35的动力轴上固定设有动力齿轮36,所述夹紧螺纹杆23左端固定设有传动齿轮33,所述传动齿轮33和所述动力齿轮36啮合。
有益地,所述滑块26上侧放置有诱饵32,所述诱饵32用于引诱蟑螂进入所述内腔18中。
有益地,所述壳体10中固定设有侧盖电机39,所述侧盖电机39的动力轴上固定设有拉绳卷线筒40,所述拉绳卷线筒40上缠绕有侧盖拉绳12,所述侧盖拉绳12下端和所述侧盖板13固定连接,所述侧盖电机39启动后能带动所述拉绳卷线筒40缠绕所述侧盖拉绳12并拉动所述侧盖板13绕所述连接合页11转动。
整个装置的机械动作的顺序:
将本装置放置在蟑螂容易出没的位置,等到了晚上时侧盖电机39启动带动拉绳卷线筒40旋转缠绕侧盖拉绳12,侧盖拉绳12拉动侧盖板13绕连接合页11转动打开,诱饵32会发出气味吸引蟑螂爬入内腔18中,当蟑螂爬到感应滑板15上时由于蟑螂的重量会导致感应滑板15向下移动一小段距离,距离传感器16会捕捉到和感应滑板15之间距离的改变,并给电磁铁31通上电,正常情况下电磁铁31通电后产生的吸引力无法吸引滑块26向下移动,但滑块26只需向下移动一下段距离时电磁铁31就能吸附滑块26并加速滑块26向下移动,蟑螂继续向诱饵32爬去,当蟑螂位于压力传感器30上侧时由于重力会推动滑块26向下移动一小段距离,之后电磁铁31便会对滑块26产生吸引力加速滑块26下降,动力齿条55带动变向齿轮54转动,变向齿轮54带动连杆38和传动齿条56向下移动,连杆38带动上罩19向下移动盖在压力传感器30上侧并将蟑螂困在工作腔24内,动力电机35启动带动动力齿轮36和传动齿轮33转动,传动齿轮33带动夹紧螺纹杆23转动,夹紧螺纹杆23带动两侧的夹紧侧板25互相靠近将将蟑螂推动至压力传感器30的中间位置,通过压力传感器30能确定蟑螂在压力传感器30上的具体位置,电动滑轨52启动带动工作壳体58前后移动至蟑螂的位置,夹紧螺纹杆23转动带动夹紧侧板25互相靠近的过程中会同时带动卷线筒21缠绕拉绳22,拉绳22拉动电磁铁47和被电磁铁47吸附的固定针42向上移动并压缩发射弹簧45,之后动力电机35启动反转令卷线筒21反转快速释放拉绳22,缺少拉绳22的拉力后发射弹簧45的弹力会推动电磁铁47快速向下移动,移动一段距离后电磁铁47断电不再吸附固定针42,固定针42通过惯性插入蟑螂的身体中,送料弹簧43推动推板44,推板44推动下一根固定针42移动至电磁铁47下端,固定针42插入蟑螂后电磁铁31断电,滑块26和上罩19向上移动,之后蟑螂进食完诱饵32后会离开内腔18回到巢穴内,这时通过连接绳48将信号发射器49向下拉动,信号发射器49会跟随蟑螂移动至巢穴附近,使用者只需利用手机检测信号发射器49发出的信号即能定位蟑螂巢穴的大致位置,之后通过连接绳48的即可找到蟑螂的巢穴。
上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此领域技术的人士能够了解本发明内容并加以实施,并不能以此限制本发明的保护范围。凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围内。
- 一种蟑螂位置信息采集装置
- 一种道路设施位置、图像信息采集装置及采集信息的方法