全自动翻转传输系统
文献发布时间:2023-06-19 09:44:49
技术领域
本发明涉及一种货物运输系统,具体是指一种货物、尤其是箱体式货物的全自动翻传输系统。
技术背景
随着市场的扩大,产品类型也从原来的单一品种、多批量扩展为多品种、小批量,且产品加工结束后因安装零部件往往需要对部件进行翻转等需求,这大大加大了货物传输过程中的难度,因此准时、高效、稳定、且能满足需求的物料配送就显得格外重要。
以公开号CN 207058879 U名称为“座便器高压成型坯体的自动翻转输送装置”为代表的专利采用主机框架、翻转框架、托板夹紧装置、压紧装置等装置,可实现带托板的坯体实现自动翻转和输送的功能,但此翻转装置运转过程中需工人手动抽取托板,可能出现因工人操作失误而造成模型损坏的漏洞和风险,甚至产生对危害工人安全等问题。公开号CN 111452005 A名称为一种多角度翻转机体的翻转架及其工作过程为代表的专利采用吊架,支撑架、导向轮和可编程控制器、夹紧装置。可实现六面翻转检验,但存在可能发生货物掉落、需检验人员近距离接触、无配套运输装置等问题。
发明内容
本发明的目的是针对上述问题,提供一种针对箱体式货物、尤其是长方体货物从传送带下线到物流传输至主流水线的全流程自动化、无人化、且可实现六面翻转的全自动翻转传输系统。
为实现上述目的,本发明采用下述技术方案:一种全自动翻转传输系统,其包括传送带、第一抓取机构、翻转机构、第二抓取机构、控制系统和转运车,所述第一抓取机构安装在传送带的上方,用于将传送带运送的箱体式货物通过夹取、升降和移动运送至翻转机构上;第二抓取机构安装在翻转机构的前方,用于将翻转好的货物通过夹取、升降和移动运送至转运车上;
所述翻转机构包括推进装置和翻转装置;所述推进装置包括推进平台、丝杠、推进小车、推进电机和皮带;所述推进电机安装在推进平台的上方,通过皮带与丝杠相连,推进小车与丝杠相连;推进装置安装在翻转装置的上方,用于推进货物;所述翻转装置包括翻转小车、右转90°装置、左转90°装置和翻转平台;
所述翻转小车包括翻转小车框架、翻转小车导轨、翻转小车平台、翻转小车电机和翻转小车电缸;其中翻转小车电机通过链条与翻转小车车轮连接,并驱动翻转小车行走;其中翻转小车电缸的活塞杆与翻转小车平台连接,翻转小车电缸的底部与翻转小车的框架底部连接;当货物由第一抓取机构运送至翻转小车时,翻转小车电缸的活塞杆收缩带动翻转平台下降,并且翻转小车电机旋转带动翻转小车行走;
所述右转90°装置包括右转90°滚筒、右转90°平台和右转90°活动挡板,其中右转90°滚筒与右转90°平台相连,右转90°活动挡板位于右转90°平台的右侧;其中右转90°滚筒安装在右转90°平台上,且多个右转90°滚筒排列成一个曲面;所述左转90°装置包括左转90°滚筒、左转90°平台和左转90°活动挡板,其中左转90°滚筒安装在左转90°平台上,且多个左转90°滚筒排列成一个曲面,左转90°活动挡板安装在左转90°平台的左侧,以实现货物贴合曲面和防止货物掉落。
进一步,翻转机构还包括旋转导轨装置和直行导轨,所述直行导轨和旋转导轨装置分别安装在翻转平台上,翻转小车安装在旋转导轨装置和直行导轨上,其中旋转导轨装置包括旋转导轨和旋转导轨电机,旋转导轨与旋转导轨电机之间通过齿轮进行连接;当翻转小车运转至旋转导轨上时,旋转导轨电机旋转带动旋转导轨旋转,从而带动翻转小车改变运动方向。
进一步,还包括安装在左转90°装置的右侧的翻转90°装置,所述翻转90°装置包括翻转90°框架、翻转90°电缸、翻转90°铰链、翻转90°轮子、翻转90°滚筒、翻转90°导轨和翻转90°平台,翻转90°电缸的底部与翻转框架的内部底部连接,翻转90°电缸的活塞杆上端连接翻转90°铰链,翻转90°铰链通过翻转90°轮子与翻转90°导轨相连,翻转90°导轨安装在翻转90°平台上。
可优选的是,当货物运送至翻转90°装置时,在推进装置的作用下将货物运送至翻转90°平台上,翻转90°电缸的活塞杆伸出,能将货物向前翻转90°,随后翻转小车运转至翻转90°装置的末端,在推进装置的作用下,翻转90°的货物运送至翻转小车上。
进一步,还包括安装在左转90°装置前方的翻转180°装置,所述翻转180°装置包括翻转180°框架、前翻转180°电缸、前翻转180°平台、后翻转180°电缸和后翻转180°平台,前翻转180°平台、后翻转180°平台与翻转90°平台的结构相同,前翻转180°电缸及前翻转180°平台、与后翻转180°电缸及后翻转180°平台分别对称安装,且中间设有圆弧状突起;当货物运送至翻转180°装置时,在推进装置的作用下将货物运送至前翻转180°平台上,前翻转180°电缸伸出,能将货物向前翻转90°,同时后翻转180°电缸伸出至指定位置停止,因前翻转180°平台与后翻转180°平台之间设置的所述圆弧状突起,货物翻转至后翻转180°平台,随后,后翻转180°电缸收缩,货物实现180°翻转,同时,翻转小车运转至翻转180°装置的末端,在推进装置的作用下,翻转180°的货物运送至翻转小车上。
可优选的是,所述翻转机构安装在第一抓取机构的前方,货物运转至翻转机构时,以此时为基准,货物的六面分别为上面、下面、左面、右面、前面和后面;若直接由翻转小车运输至翻转平台的末端能使货物的上面朝上,货物在推进装置和翻转180°装置的共同作用下使货物的下面朝上,在推进装置和右转90°装置的共同作用下使货物的左面朝上,在左转90°装置和推进装置的共同作用下使货物的右面朝上,在翻转180°装置、翻转90°装置和推进装置的共同作用下使货物的前面朝上,货物在翻转90°装置和推进装置的共同作用下使货物后面朝上。
可优选的是,所述转运车安装在第二抓取机构的下方,所述控制系统分别安装在传送带、行走装置、升降装置、夹持装置、翻转小车、旋转导轨装置、左转90°装置、右转90°装置、翻转90°装置和翻转180°装置上,用于控制传送带的运行位置、行走装置的横向位移、升降装置的升降位移、夹持装置的夹持开合度、翻转小车的移动位置、旋转导轨的旋转角度、左转90°装置的活动挡板位移、右转90°装置的活动挡板位移、翻转90°装置的翻转开合度、翻转180°装置的翻转开合度以及推进装置的推进位移。
可优选的是,所述行走装置包括行走电机、行走齿轮和行走框架;行走齿轮和行走电机安装在行走框架上,行走框架的下方与升降框架相连。
可优选的是,所述行走齿轮包括第一大齿轮、第二大齿轮和夹设在第一大齿轮、第二大齿轮之间的小齿轮,所述小齿轮分别与第一大齿轮和第二大齿轮外啮合;行走电机与行走齿轮中的小齿轮通过键连接,行走电机驱动小齿轮进行回转,从而小齿轮带动第一大齿轮与第二大齿轮回转,第一大齿轮与第二大齿轮设立在横梁式龙门架上,且成对地设置在行走框架上的轮轴架设在横梁式龙门框架,通过轮轴的转动,从而带动行走框架移动,进而带动升降装置和夹持装置进行横向移动。
与现有技术相比,本发明有益的效果是:
本发明中抓取机构可对不同型号和种类的箱体式货物的抓取、平移和升降作业,通过设置翻转机构可实现对长方体货物的六面翻转;机构在控制系统的控制下,可对不同型号和种类的箱体式货物进行抓取、平移、升降、翻转下线作业,且全程自动化,保证了运送过程的高效性和安全性,提高了生产效率。
附图说明
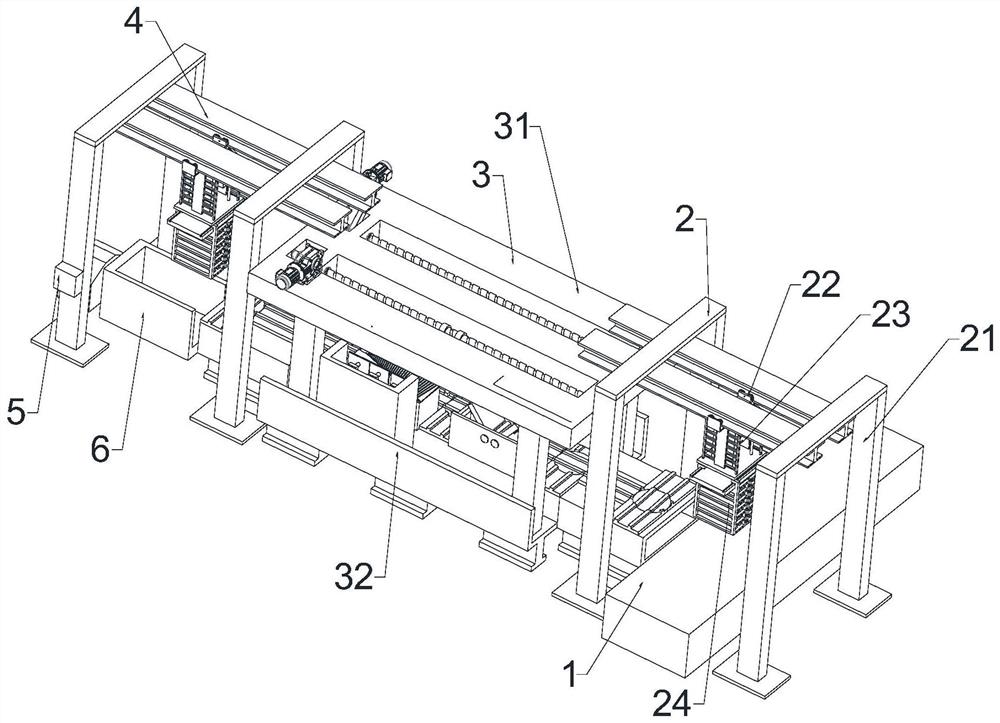
图1为本发明全自动翻传输系统的整体结构示意图;
图2为本发明的抓取机构结构示意图;
图3为本发明的翻转机构结构示意图;
图4为本发明的抓取机构机架结构示意图;
图5为本发明的行走装置结构示意图;
图6为本发明的升降装置结构示意图;
图7为本发明的夹持装置结构示意图;
图8为本发明的推进装置结构示意图;
图9为本发明的翻转装置结构示意图;
图10为本发明的推进小车结构示意图;
图11为本发明的翻转小车结构示意图;
图12为本发明的旋转导轨结构示意图;
图13为本发明的右转90°装置整体结构示意图;
图14为本发明的右转90°装置平台和滚筒结构示意图;
图15为本发明的左转90°装置整体结构示意图;
图16为本发明的左转90°装置平台和滚筒结构示意图;
图17为本发明的翻转90°装置结构示意图;
图18为本发明的翻转180°装置结构示意图。
图中:1—传送带、2—第一抓取机构、3—翻转机构、4—第二抓取机构、5—控制系统、6—转运车、21—机架、22—行走装置、23—升降装置、24—夹持装置、31—推进装置、32—翻转装置、211—立柱,212—横梁式龙门框架、221—行走电机、222—行走齿轮、223—行走框架、224—轮轴、231—升降框架、232—导向光轴、233—升降电缸、241—夹持平台、242—夹持导轨、243—夹爪、244—夹持油缸、311—推进平台、312—丝杠、313—推进小车、314—推进电机、315—皮带、321—翻转小车、322—旋转导轨装置、323—直行导轨、324—右转90°装置、325—翻转90°装置、326—左转90°装置、327—翻转180°装置、328—翻转平台、2221—第一大齿轮、2222—第二大齿轮、2223—小齿轮、3211—翻转小车框架、3212—翻转小车导轨、3213—翻转小车平台、3214—翻转小车电机、3215—翻转小车电缸、3221—旋转导轨、3222—旋转导轨电机、3241—右转90°滚筒、3242—右转90°平台、3243—右转90°活动挡板、3251—翻转90°框架、3252—翻转90°电缸、3253—翻转90°铰链、3254—翻转90°轮子、3255—翻转90°滚筒、3256—翻转90°导轨、3257—翻转90°平台、3261—左转90°滚筒、3262—左转90°平台、3263—左转90°活动挡板、3271—翻转180°框架、3272—前翻转180°电缸、3273—前翻转180°平台、3274—后翻转180°电缸、3275—后翻转180°平台。
具体实施方式
以下结合附图,对本发明作进一步说明。
如图1所示,本发明的全自动翻转传输系统包括传送带1、第一抓取机构2、翻转机构3、第二抓取机构4、控制系统5和转运车6。第一抓取机构2安装在传送带1的上方,能将传送带1运送的货物通过夹取、升降、平移等动作运送至翻转机构3上;翻转机构3安装在第一抓取机构2的前方、第二抓取机构4安装在翻转机构的前方,能将翻转好的货物通过夹取、升降、平移等动作运送至转运车6上;转运车6安装在第二抓取机构4的下方。
如图2所示,第一抓取机构2包括机架21、行走装置22、升降装置23和夹持装置24。行走装置22安装在机架21上,可以控制升降装置23和夹持装置24的横向位移,升降装置23的上部与行走装置22连接,升降装置23的下部与夹持装置24连接,可实现夹持装置24的上下移动,夹持装置24能将传送带运来的货物夹持;在行走装置22、升降装置23、夹持装置24的共同作用下能将货物运送至翻转机构3上。
如图3所示,翻转机构3包括推进装置31和翻转装置32。推进装置31安装在翻转装置32的上方,承担货物在翻转过程中的推进工作,在翻转装置32和推进装置31的共同作用下可实现箱体形货物的六面翻转。
如图4所示,机架21包括四个立柱211和位于立柱211上面的横梁式龙门框架212。机架21的作用是为行走装置22、升降装置23和夹持装置24提供支撑。
如图5所示,行走装置22包括行走电机221、行走齿轮222、行走框架223、轮轴224;行走齿轮222分别安装在横梁式龙门框架212相向面对的行走框架223上,行走电机221安装在行走框架223上,行走框架223的下方与升降框架231相连,行走齿轮222包括第一大齿轮2221、第二大齿轮2222和夹设在第一大齿轮2221和第二大齿轮2222之间的小齿轮2223,小齿轮2223分别与第一大齿轮2221和第二大齿轮2222外啮合。行走齿轮222在工作的过程中,行走框架223上设有轮轴224,行走电机221驱动小齿轮2223进行回转,从而小齿轮2223带动第一大齿轮2221与第二大齿轮2222回转,第一大齿轮2221与第二大齿轮2222设立在横梁式龙门架212上,且成对地设置在行走框架223上的轮轴224架设在横梁式龙门框架212,通过轮轴224的转动,带动行走框架223移动,从而带动升降装置23、夹持装置24进行横向移动。
如图6所示,升降装置23包括升降框架231、导向光轴232和升降电缸233,其中升降框架231的上端与行走框架223连接,升降电缸233的底部与升降框架231上端通过螺栓进行连接,升降电缸233的活塞杆与夹持平台241通过螺栓进行连接,导向光轴232与夹持平台241连接。升降电缸233可通过伸出和收缩活塞杆来带动夹持装置24的上下移动,导向光轴232可以使夹持装置24保持稳定的纵向移动。
如图7所示,夹持装置24包括夹持平台241、夹持导轨242、夹爪243和夹持油缸244。其中夹持导轨242设在夹持平台241上,同时与夹爪243连接,夹持油缸244底部与夹持平台241连接,夹持油缸244活塞杆与夹爪243通过螺栓连接,夹持油缸244可通过伸出和收缩活塞杆来控制夹爪243的开合度,进而可以控制夹爪243夹紧货物。
如图8所示,推进装置31包括推进平台311、丝杠312、推进小车313、推进电机314和皮带315;其中推进电机314安装在推进平台311的上方,通过皮带315与丝杠312相连,推进小车314与丝杠313相连;推进装置31安装在翻转装置32上方,推进电机314回转可带动丝杠312旋转,丝杠312旋转可带动推进小车313进行前后移动。
如图9所示,翻转装置32包括翻转小车321、旋转导轨装置322、直行导轨323、右转90°装置324、翻转90°装置325、左转90°装置326,翻转180°装置327和翻转平台328;其中直行导轨323和旋转导轨装置322安装在翻转平台328上,翻转小车321安装在导轨上,以实现货物在翻转装置32中的运输;其中右转90°装置324安装在偏进传送带1的翻转平台328的右侧,翻转180°装置327安装在右转90°装置324的左侧,左转90°装置326安装在翻转180°装置327的前方,翻转90°装置325安装在左转90°装置326的右侧。
如图10所示,推进小车313包括推进框架3131、推进油缸3132和气垫3133。推进框架3131安装在丝杠312上,推进油缸3132安装在推进框架3131内,气垫3133安装在推进油缸3132的活塞杆上端,可以减小推进小车313与货物之间的摩擦。
如图11所示,翻转小车321包括翻转小车框架3211、翻转小车导轨3212、翻转小车平台3213、翻转小车电机3214和翻转小车电缸3215;其中翻转小车电机3214通过链条与翻转小车车轮连接,并驱动翻转小车321行走;其中翻转小车电缸3215的活塞杆与翻转小车平台3213连接,翻转小车电缸3215底部与翻转小车框架3211底部连接;当货物由第一抓取机构2运送至翻转小车321时,翻转小车电缸3215活塞杆收缩带动翻转平台3213下降,可以防止货物在运输中掉落,然后,翻转小车电机3214旋转带动翻转小车321行走。
如图12所示,旋转导轨装置322包括旋转导轨3221和旋转导轨电机3222。旋转导轨3221与旋转导轨电机3222之间通过齿轮进行连接,在控制系统的作用下,当翻转小车321运转至旋转导轨3221上时,旋转导轨电机3222旋转带动旋转导轨3221旋转,从而带动翻转小车321改变运动方向。
如图13~14所示,其中右转90°装置324包括右转90°滚筒3241、右转90°平台3242和右转90°活动挡板3243,其中右转90°滚筒3241安装在右转90°平台3242上,且多个右转90°滚筒3241排列成一个曲面,右转90°活动挡板3243安装在右转90°平台3242的右侧,以实现货物充分贴合曲面和防止货物掉落。当货物运送至右转90°装置324时,推进装置31与右转90°装置324同时作用,可实现货物右转90°。
如图15~图16所示,左转90°装置326包括左转90°装置包括滚筒3261、左转90°平台3262和左转90°挡板3263,其中左转90°滚筒3261安装在左转90°平台3262上,且多个左转90°滚筒3261排列成一个曲面,左转90°活动挡板3263安装在左转90°平台3262的左侧,以实现货物充分贴合曲面和防止货物掉落;当货物运送至左转90°装置326时,推进装置31与左转90°装置326同时作用,可实现货物左转90°。
如图17所示,其中翻转90°装置325包括翻转90°框架3251、翻转90°电缸3252、翻转90°铰链3253、翻转90°轮子3254、翻转90°滚筒3255、翻转90°导轨3256和翻转90°平台3257,翻转90°电缸3252底部与翻转90°框架3251内部底部连接,翻转90°电缸3252活塞杆上端连接翻转90°铰链3253,翻转90°铰链3253通过翻转90°轮子3254与翻转90°导轨3256相连,翻转90°导轨3256安装在翻转90°平台3257上;当货物运送至翻转90°装置325时,在推进装置31的作用下将货物运送至翻转90°平台3257上,翻转90°电缸3252活塞杆伸出,能将货物向前翻转90°,随后,翻转小车321运转至翻转90°装置325的末端,在推进装置31的作用下,将翻转90°的货物运送至翻转小车321上。
如图18所示,翻转180°装置327包括翻转180°框架3271、前翻转180°电缸3272、前翻转180°平台3273、后翻转180°电缸3274和后翻转180°平台3275;前翻转180°平台3273、后翻转180°平台3275与翻转90°平台3257结构相同,前翻转180°电缸3272和前翻转180°平台3273与后翻转180°电缸3274和后翻转180°平台3275对称安装,且中间设有圆弧状突起。当货物运送至翻转180°装置327时,在推进装置31的作用下将货物运送至前翻转180°平台3273上,前翻转180°电缸3272活塞杆伸出,能将货物向前翻转90°,同时后翻转180°电缸3274活塞杆伸出至指定位置停止,因前翻转180°平台3273与后翻转180°平台3275之间有圆弧状突起,故在惯性的作用下,货物运转至后翻转180°平台3275,随后,后翻转180°电缸3274活塞杆收缩,货物实现180°翻转,同时,翻转小车321运转至翻转180°装置327的末端,在推进装置31的作用下,翻转180°的货物运送至翻转小车321上。
为了更好的理解本发明,下面对本发明的工作过程进行介绍。
传送带1在控制系统5的作用下运转至指定位置时停止,行走装置22、升降装置23、夹持装置24运转到指定位置时停止,随后控制系统5控制下夹持油缸244收缩活塞杆带动夹爪243夹持货物,升降电缸233带动夹持装置24上升,上升至指定高度后停止。
行走小车22在行走电机221的驱动下,带动升降装置23和夹持装置24进行横向移动,移动到指定位置时停止。翻转小车321在翻转小车电机3214的驱动下运动至翻转平台328指定位置后停止,夹持油缸244、升降电缸233、行走电机221同时工作将货物运送至翻转小车321的翻转小车平台3213上,随后第一抓取机构2复位,以此时为基准,箱体式货物的六面分别为上面、下面、左面、右面、前面和后面,若直接由翻转小车321运输至翻转平台328的末端能使货物上面朝上,在推进装置31和右转90°装置324的共同作用下可以使货物左面朝上,货物在翻转180°装置327、翻转90°装置325和推进装置31的共同作用下可以使货物前面朝上,货物在左转90°装置326和推进装置31的共同作用下可以使货物右面朝上,货物在推进装置31和翻转180°装置327的共同作用下可以使货物下面朝上,货物在翻转90°装置325和推进装置31的共同作用下可以使货物后面朝上。货物翻转完毕,由翻转小车321将货物运输至翻转机构3的末端,在第二抓取机构4作用下将货物由翻转小车321上的货物运送至转运车6上。
本发明的全自动翻转传输系统,具有以下有益效果:
第一,设置有翻转装置32,其包括翻转小车321、旋转导轨装置322、直行导轨323、右转90°装置324、翻转90°装置325、左转90°装置326,翻转180°装置327和翻转平台328。四个单独的翻转装置串联而设,可使装置按需求工作时,控制起来更加灵活、精确。
第二,为了实现翻转小车321更灵活运动,本发明在翻转平台328上设置有直行导轨323和旋转导轨装置322,通过旋转导轨电机3222旋转带动旋转导轨3221旋转,从而带动安装在导轨上的翻转小车321改变运动方向,以实现货物在翻转装置22中的可控、可靠运输。
第三,本发明的传输系统,作为一个有机的整体,可按需求实现箱体货物六面翻转与运输,且全程由控制系统控制,实现了工厂的无人化、自动化,减少了事故的产生。
以上所述的实施例仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
- 全自动翻转传输系统
- 一种全自动铁芯翻转出料系统的中间治具翻转机构