一种穿梭车
文献发布时间:2023-06-19 09:46:20
技术领域
本发明属于物流设备技术领域,具体涉及一种穿梭车。
背景技术
制造业对自动化、智能化生产模式及现代化、智能化的物流运输和仓储系统的需求日益增长。
穿梭车作为现代智能化的物流运输和仓储系统的关键设备之一,应用于越来越多的生产制造和物流项目中。而如何让穿梭车更高效的完成物流作业,提高自动化立体仓库作业效率成为穿梭车的研发人员一直致力解决的一个问题。
发明内容
本发明的目的是提供一种穿梭车,用以使现有穿梭车能够更高效地完成物流作业。
为解决上述问题,本发明公开了一种穿梭车,包括:
车体;
行走机构,所述行走机构位于所述车体下侧;
升降机构,所述升降机构设置在所述车体上侧;
伸缩取货机构,所述伸缩取货机构设置在所述升降机构顶部。
本发明的技术方案,还具有以下特点:
进一步地,所述行走机构包含一对转动地设置在车体内的纵向车轴,每个所述纵向车轴上套设有套筒,每个所述套筒上均设置有一对摆臂,两套筒的对应摆臂之间铰接有两横向车架,两横向车架之间设置有两纵向车架,两纵向车架之间设置有一对横向车轴,每个横向车轴的两端和所述纵向车轴的两端均分别设置有车轮;两纵向车轴的上方设置有丝杠,所述丝杠转动设置在所述车体内,每个所述套筒上均设置有连接座,所述连接座与所述摆臂呈 90°布置,每个所述连接座内均设置有滑块,所述滑块与所述丝杠螺纹配合;车体内设置有与所述丝杠传动配合的第一驱动装置、与任一个所述横向车轴传动配合的第二驱动机构以及与任一个所述纵向车轴传动配合的第三驱动机构。
进一步地,所述第一驱动机构、第二驱动机构和所述第三驱动机构均为步进电机。
进一步地,所述第一驱动机构、第二驱动机构和所述第三驱动机构的输出端分别与丝杠、对应横向车轴以及对应纵向车轴之间皮带传动配合
进一步地,所述升降机构包含设置在车体顶部的基座,所述基座上设置有往复伸缩机构、一对滑轨和一对支座,该对滑轨的侧部均设置有滑槽,两滑槽中滑动设置有第一销轴,所述第一销轴与往复伸缩机构的伸缩端连接,两支座中设置有第二销轴,基座的上方布置有升降板,所述升降板的下侧铰接有两对支撑杆,其中一对支撑杆的下端均与第一销轴的两端相铰接,另一对支撑杆与所述第二销轴相铰接。
进一步地,两对所述支撑杆交叉布置,并且两对支撑杆的中部还通过第三销轴相绞接。
进一步地,所述往复伸缩机构为电动伸缩杆。
进一步地,所述伸缩取货机构包含相对设置的第一伸缩臂和第二伸缩臂;所述第一伸缩臂包含支架,所述支架的侧部设置有底板,所述底板的侧部滑动设置有中间板,所述中间板的侧部滑动设置有前板,所述中间板内设置有安装座,所述安装座内设置有转轴,所述转轴上套装有齿轮,所述底板和所述前板的侧部分别设置有与所述齿轮啮合的第一齿条和第二齿条,所述中间板的底部设置有第三齿条,所述第三齿条传动配合有第二齿轮,所述第二齿轮连接在第一电机的转轴上,第一电机设置在底板上,前板的前端侧沿设置有第二电机,所述第二电机的转轴上设置有L形拨叉;所述第二伸缩臂和所述第一伸缩臂的结构相同。
进一步地,所述底板上设置有滑轨,所述滑轨内设置有多个滚轮,所述滚轮的轮轴固定在中间板的侧部。
进一步地,所述中间板上设置有多个滑轨,每个所述滑轨内均设置有多个滚轮,所述滚轮的轮轴固定在前板的侧部。
与现有技术相比,本发明的穿梭车,具有以下优点:(1)本发明的穿梭车,无需借助其他设备就可独立地在自动化立体仓库的多条巷道作业,从而提高了货物存取的效率;(2)本发明的穿梭车,具有升降机构,作业面积同时覆盖多层货架,即一车可替代多台传统穿梭车,降低了仓库成本;(3)本发明的穿梭车,其整体结构简单,便于维修;结构稳固性好,安全性较高,成本低,具有较好的推广使用前景。
附图说明
此处所说明的附图用来提供对本发明的进一步理解,构成本发明的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
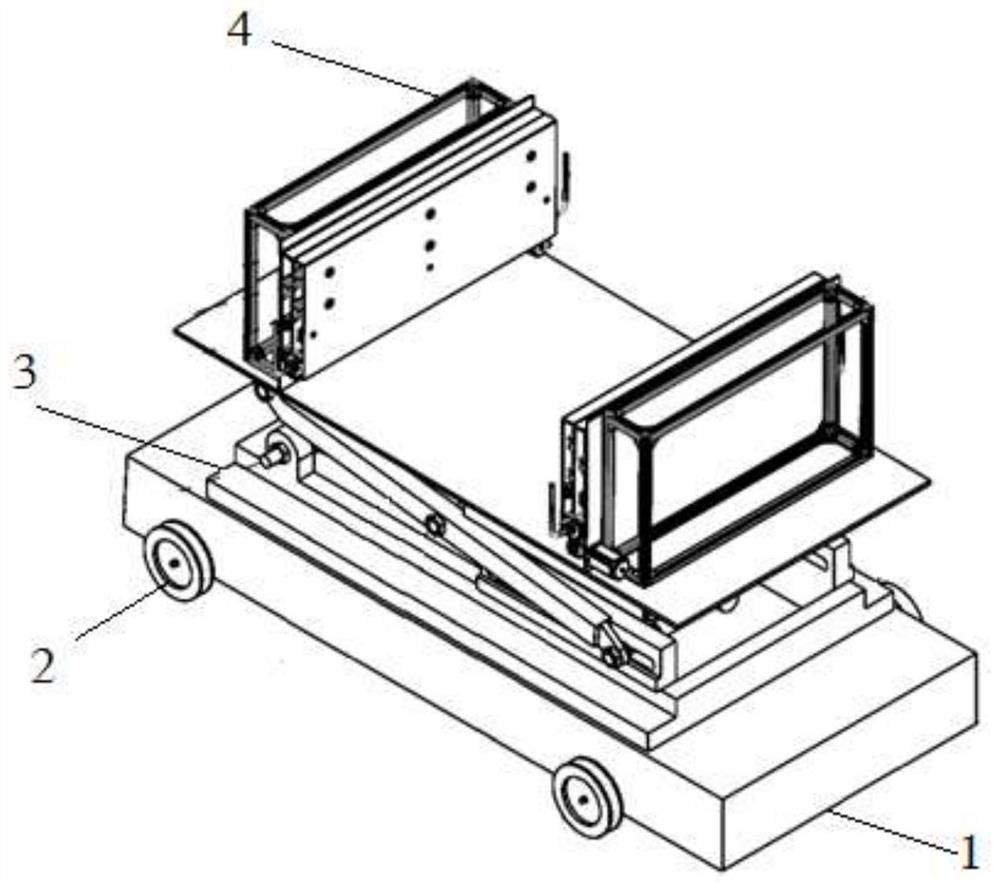
图1是本发明的一种穿梭车的结构示意图;
图2是图1中行走机构的结构示意图;
图3是图2中纵向车轴与横向车架连接处的结构示意图;
图4是图2中丝杠与连接座的装配处的结构示意图;
图5是图1中升降机构的结构示意图;
图6是图1中伸缩取货机构的局部结构示意图;
图7是图6去掉前板后的机构示意图;
图8是图7去掉中间板后的结构示意图;
图9是伸缩取货机构L形拨叉视角的结构示意图;
图10是中间板的安装齿轮处的结构示意图。
图中:1.车体,2.行走机构,201.套筒,202.机箱,203.第三驱动机构, 204.主动带轮,205.从动带轮,206.第一驱动机构,207.摆臂,208.横向车架, 209.第二驱动机构,210.丝杠,211.车轮,212.纵向车架,213.纵向车轴,214. 横向车轴,215.连接座,216.滑块,3.升降机构,301.往复伸缩机构,302.基座,303.第二销轴,304.第二销轴,305.支撑杆,306.第四销轴,307.升降板, 308.第三销轴,309.第一销轴,310.滑轨,4.伸缩取货机构,401.支架,402. 底板,403.滑轨,404.中间板,405.第一齿条,406.第二齿条,407.第一电机, 408.第二齿轮,409.第三齿轮,410.前板,411.滚轮,412.安装座,413.L形拨叉,414.第二电机,415.转轴。
具体实施方式
以下将配合实施例来详细说明本发明的实施方式,藉此对本发明如何应用技术手段来解决技术问题并达成技术功效的实现过程能充分理解并据以实施。
如图1所示,本发明的一种穿梭车,包括:
车体1;
行走机构2,行走机构2位于车体1下侧;
升降机构3,升降机构3设置在车体1上侧;
伸缩取货机构4,伸缩取货机构4设置在升降机构3顶部。
如图2-4所示,本发明的一种穿梭车中,行走机构2包含一对转动地设置在车体1内的纵向车轴213,每个纵向车轴213上套设有套筒201,每个套筒201上均设置有一对摆臂207,两套筒201的对应摆臂207之间铰接有两横向车架208,两横向车架208之间设置有两纵向车架212,两纵向车架 212之间设置有一对横向车轴214,每个横向车轴214的两端和纵向车轴213 的两端均分别设置有车轮211;两纵向车轴213的上方设置有丝杠210,丝杠210的一端通过轴承座设置在车体1内的机箱202中,每个套筒201上均设置有连接座215,连接座215与摆臂207呈90°布置,每个连接座215内均设置有滑块216,滑块216与丝杠210螺纹配合;车体1内设置有与丝杠 210传动配合的第一驱动装置206、与任一个横向车轴214传动配合的第二驱动机构209以及与任一个纵向车轴213传动配合的第三驱动机构203。
第一驱动机构206、第二驱动机构209和第三驱动机构203均优选为步进电机;第一驱动机构206、第二驱动机构209和第三驱动机构203的输出端分别与丝杠210、对应横向车轴214以及对应纵向车轴213之间皮带传动配合。以第三驱动机构203与纵向车轴213的配合为例,第三驱动机构203 的输出端上连接有主动带轮204,纵向车轴213上连接有从动带轮205,主动带轮204与从动带轮205之间通过皮带连接后可形成皮带传动配合;第二驱动机构209与对应横向车轴214之间皮带传动配合,第一驱动机构206的输出端与丝杠210之间皮带传动配合与第三驱动机构203和纵向车轴213的配合原理相似,这里不再重复阐述。
如图5所示,本发明的一种穿梭车中,升降机构3包含设置在车体1顶部的基座302,基座302上设置有往复伸缩机构301、一对滑轨310和一对支座303,该对滑轨310的侧部均设置有滑槽,两滑槽中滑动设置有第一销轴309,第一销轴309与往复伸缩机构301的伸缩端连接,两支座303中设置有第二销轴304,基座302的上方布置有升降板307,升降板307的下侧铰接有两对支撑杆305,其中一对支撑杆305的下端分别与第一销轴309的两端相铰接,另一对支撑杆305与第二销轴304相铰接。两对支撑杆305交叉布置,并且两对支撑杆305的中部还通过第三销轴308相绞接。往复伸缩机构301优选为电动伸缩杆。
如图6-10所示,本发明的一种穿梭车中,伸缩取货机构4包含相对设置的第一伸缩臂和第二伸缩臂;第一伸缩臂包含支架401,支架401的侧部设置有底板402,底板402的侧部滑动设置有中间板404,中间板404的侧部滑动设置有前板410,中间板404内设置有安装座412,安装座12内设置有转轴415,转轴415上套装有第一齿轮,底板402和前板410的侧部分别设置有与第一齿轮啮合的第一齿条405和第二齿条406,中间板404的底部设置有第三齿条409,第三齿条409传动配合有第二齿轮408,第二齿轮408 连接在第一电机407的转轴上,第一电机407设置在底板402上,前板410 的前端侧沿设置有第二电机414,第二电机414的转轴上设置有L形拨叉 413;第二伸缩臂和第一伸缩臂的结构相同。底板402上设置有滑轨403,滑轨403内设置有多个滚轮411,滚轮411的轮轴固定在中间板404的侧部。中间板404上设置有多个滑轨406,每个滑轨406内均设置有多个滚轮411,滚轮411的轮轴固定在前板410的侧部。
以下简述本发明的一种穿梭车的工作原理:当需要横向移动时,启动第三驱动机构203,第三驱动机构203通过皮带传动带动对应的纵向车轴213 转动,使车体1横向移动。当需要纵向移动时,先启动第一驱动机构206,通过皮带传动以及丝杠传动配合,使滑块216沿着丝杠210运动,进而使套筒201转动带动横向车架208下落,直至横向车轴214上的车轮211落地;之后启动第二驱动机构209,通过皮带传动带动对应横向车轴214转动,从而实现车体1的纵向移动。升降机构3使用时,启动往复伸缩机构301,通过一对支撑杆305实现升降板307的升高调节,具体的高度可通过往复伸缩机构301的伸缩程度来控制。通过伸缩取货机构4抓取货物时,启动第一电机407,第一电机407通过第二齿轮408带动中间板404向前移动,中间板 404在向前移动的过程中一方面会通过第一齿轮与第一齿条405配合实现中间板404的前移,另一方面会通过第一齿轮与第二齿条406配合实现前板410 的前移,进而确保L形拨叉413能够触及更深的位置,之后启动第二电机 414使L形拨叉413旋转使其抵挡在货物的外部,最后使第一电机407反方向转动完成货物的抓取。
上述说明示出并描述了本发明的若干优选实施例,但如前所述,应当理解发明并非局限于本文所披露的形式,不应看作是对其他实施例的排除,而可用于各种其他组合、修改和环境,并能够在本文所述发明构想范围内,通过上述教导或相关领域的技术或知识进行改动。而本领域人员所进行的改动和变化不脱离发明的精神和范围,则都应在发明所附权利要求的保护范围内。
- 一种穿梭车轨道及具有该穿梭车轨道的穿梭车系统
- 一种穿梭车式自动化仓储及穿梭车系统