一种用于打磨的机器人
文献发布时间:2023-06-19 09:49:27
技术领域
本发明涉及大型铸件打磨装置技术领域,具体涉及一种用于打磨的机器人。
背景技术
目前,中国已成为铸造业大国,铸件的清理在铸造生产中是不可缺少的一道关键工序。但由于现有铸造生产的机械化和自动化的程度很低,国内各个厂家还仍然停留在依靠人工进行打磨,处理铸件毛坯上的浇冒口、飞边、毛刺等。在大型、重型铸件打磨过程中,使用人工打磨,需要大量的场地,生产效率低下,打磨质量不能保证,这些因素都严重制约着中国的铸造行业的良性发展。
熟悉中国铸造业发展历史和近半个世纪全球产业转移历程的人员都很清楚,铸造业作为制造业中不可或缺的重要一环,却严重依赖人工作业,随着发达国家人均收入的提高,越来越没有人员从事这一又脏又累的行业,铸造业都成为了当地的夕阳产业,被迫转移到了发展中国家,因此出现了上个世纪后半叶欧美日等发达国家大量向中国转移铸造业的浪潮,刚好中国也具有庞大的铸造业从业人员和产业基础,成功地完成了这次产业大转移,为近40年世界的制造业大发展做出了巨大贡献。但是随着中国国民经济的发展和人均收入接近中等收入水平后,也同样面临着产业工人严重流失、招工难、用工成本大幅上升的困境,可是放眼全球,再也找不到和当年中国一样规模的产业工人和产业基础的国家和地区,如果找不到产业转移的承接着,整个铸造业将面临着没落和消亡,对全球的制造业和中国的制造业发展都将造成严重的影响。所以,铸造业的产业升级和自动化改造成为了我国目前不得不解决的难题。
为了解决目前铸造件打磨的人工紧缺问题,急需提供一种替代人工打磨操作的机械装置。本申请提供一种用于打磨的机器人,通过对机器人的整体结构进行合理改进设计,使机器人能够在大型铸件打磨中发挥作用,有效解决现有技术存在的不足和缺陷。
发明内容
本发明的目的就在于:针对目前存在的上述问题,提供一种用于打磨的机器人,通过对机器人的整体结构进行合理改进设计,使机器人能够在大型铸件打磨中发挥作用,有效解决现有技术存在的不足和缺陷。
为了实现上述目的,本发明采用的技术方案是:
一种用于打磨的机器人,包括机械臂、旋转拖链以及机器人底座;所述机械臂包括三段通过关节连接的角度可调手臂,所述机械臂下段手臂通过旋转拖链可旋转的安装在机器人底座上部,机械臂的中段手臂上端固定安装有手臂中继箱,机械臂的上段手臂外端安装用于打磨微调的手腕,所述手腕与机械臂上段之间形成关节连接;所述手腕包括力觉传感器、测距传感器、柱塞马达、照明灯、手腕中继箱、防护罩以及主轴;所述主轴的内端通过联轴器连接柱塞马达,主轴的外端固定连接防护罩,防护罩的下端固定夹持有用于打磨切割铸件的重负荷砂轮或切割片。
优选的,所述机器人底座的外形为圆柱结构,机器人底座的底端设置有环形凸台,环形凸台上部阵列设置有多块三角形板块结构的筋板,所述筋板与环形凸台和机器人底座之间固定焊接为一体结构。
优选的,所述旋转拖链呈螺旋状固定安装于机器人底座上,旋转拖链下部通过多块支撑板进行固定支撑,支撑板外形为梯形板结构,且支撑板上表面为水平面,所述支撑板围绕机器人底座外表面螺旋排布设置。
优选的,所述手腕的中部固定安装有力觉传感器,力觉传感器下方固定安装有安装架,所述安装架由4块方形板对称安装组成;安装架内部固定安装测距传感器;测距传感器下方的安装架底端通过轴承安装有主轴,主轴外部配套设置有圆筒状结构的轴筒。
优选的,所述主轴外端固定安装有夹持器,负重砂轮或切割片通过夹持器进行夹持固定;所述防护罩的外形为半圆形壳体结构,所述防护罩的内腔宽度大于负重砂轮以及切割片的厚度,且防护罩固定套装在夹持器外部,确保防护罩的开口朝下设置。
优选的,所述主轴的下方固定安装有照明灯,手腕中继箱固定安装在主轴内端的柱塞马达上方位置,柱塞马达的外侧固定安装有零速检测开关,柱塞马达的下方固定安装有测速开关。
由于采用了上述技术方案,本发明的有益效果是:
首先,本项目能够有效解决铸造行业铸件的清理打磨问题,缓解铸造行业面临的人工短缺,实现铸造行业的绿色可持续发展。通过工业机器人的打磨方式,提高了打磨作业效率,达到了无职业病工伤的目的,可以实现工厂大幅减员增效、铸造车间智能化绿色发展的转型升级目标。
其次,本申请形成的装备产品可以取代进口,填补国内空白,符合国家绿色、智能发展的产业政策,更可以有效解决目前制造业发展的一劳动力紧缺大难题。
再次,本申请提高铸件打磨的效率,此设备效率可为普通铸造工厂铲磨工人的效率的10倍,为工厂的增产增效提供可能。
附图说明
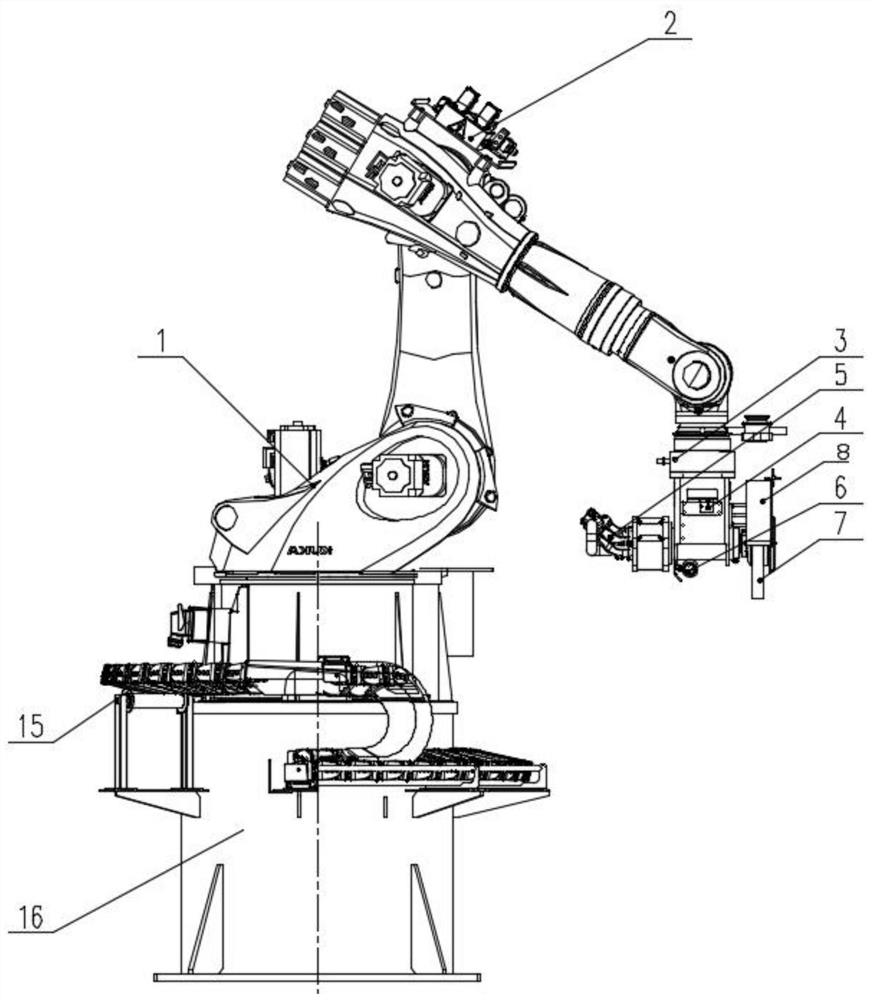
图1为本发明的机器人整体结构示意图;
图2为本发明的打磨手腕结构示意图;
图3为本发明的切割片安装结构示意图。
图中:1、机械臂;2、手臂中继箱;3、力觉传感器;4、测距传感器;5、柱塞马达;6、照明灯;7、重负荷砂轮;8、防护罩;9、主轴;10、轴承;11、测速开关;12、零速检测开关;13、联轴器;14、手腕中继箱;15、旋转拖链;16、机器人底座;17、切割片。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1,如图1-3所示:
一种用于打磨的机器人,包括机械臂1、旋转拖链15以及机器人底座16;所述机械臂1包括三段通过关节连接的角度可调手臂,所述机械臂1下段手臂通过旋转拖链15可旋转的安装在机器人底座16上部,机械臂1的中段手臂上端固定安装有手臂中继箱2,机械臂1的上段手臂外端安装用于打磨微调的手腕,所述手腕与机械臂1上段之间形成关节连接;所述手腕包括力觉传感器3、测距传感器4、柱塞马达5、照明灯6、手腕中继箱14、防护罩8以及主轴9;所述主轴9的内端通过联轴器13连接柱塞马达5,主轴9的外端固定连接防护罩8,防护罩8的下端固定夹持有用于打磨切割铸件的重负荷砂轮7或切割片17。
优选的,所述机器人底座16的外形为圆柱结构,机器人底座16的底端设置有环形凸台,环形凸台上部阵列设置有多块三角形板块结构的筋板,所述筋板与环形凸台和机器人底座16之间固定焊接为一体结构。
优选的,所述旋转拖链15呈螺旋状固定安装于机器人底座16上,旋转拖链15下部通过多块支撑板进行固定支撑,支撑板外形为梯形板结构,且支撑板上表面为水平面,所述支撑板围绕机器人底座16外表面螺旋排布设置。
优选的,所述手腕的中部固定安装有力觉传感器3,力觉传感器3下方固定安装有安装架,所述安装架由4块方形板对称安装组成;安装架内部固定安装测距传感器4;测距传感器4下方的安装架底端通过轴承10安装有主轴9,主轴9外部配套设置有圆筒状结构的轴筒。
优选的,所述主轴9外端固定安装有夹持器,负重砂轮或切割片17通过夹持器进行夹持固定;所述防护罩8的外形为半圆形壳体结构,所述防护罩8的内腔宽度大于负重砂轮以及切割片17的厚度,且防护罩8固定套装在夹持器外部,确保防护罩8的开口朝下设置。
优选的,所述主轴9的下方固定安装有照明灯6,手腕中继箱14固定安装在主轴9内端的柱塞马达5上方位置,柱塞马达5的外侧固定安装有零速检测开关12,柱塞马达5的下方固定安装有测速开关11。
由于采用了上述技术方案,本发明的有益效果是:
首先,本项目能够有效解决铸造行业铸件的清理打磨问题,缓解铸造行业面临的人工短缺,实现铸造行业的绿色可持续发展。通过工业机器人的打磨方式,提高了打磨作业效率,达到了无职业病工伤的目的,可以实现工厂大幅减员增效、铸造车间智能化绿色发展的转型升级目标。
其次,本申请形成的装备产品可以取代进口,填补国内空白,符合国家绿色、智能发展的产业政策,更可以有效解决目前制造业发展的一劳动力紧缺大难题。
再次,本申请提高铸件打磨的效率,此设备效率可为普通铸造工厂铲磨工人的效率的10倍,为工厂的增产增效提供可能。
实施例2,如图1-3所示:
打磨手腕与机械臂1上段之间通过力觉传感器3进行连接,可实时监测切割或打磨的产生力的大小,通过系统控制主轴9的进给量的大小,保证以最高效率工作而不过载以致破坏设备。手腕由柱塞马达5、主轴9、轴承10、重负荷砂轮7(切割片17)及照明灯6等组成。柱塞马达5通过超高压液压系统进行驱动,对铸件表面的浇冒口等进行切割、打磨。测距传感器4主要是对工作表面进行取点,计算与工件表面平行的打磨平面,保证打磨浇冒口后与工件表面的平面度。
需要说明的是,本申请的打磨机器人是与配套的打磨控制系统、打磨车间、操作控制系统以及工件打磨转台进行配合协调工作的。本申请的打磨机器人主要用于执行打磨动作,通过重负荷砂轮7或切割片17进行铸件表面打磨或切割清理。
进一步地,测距传感器4用于探测打磨工件与打磨手腕之间的距离,便于操作人员控制打磨操作距离。
零速检测开关12用于检测柱塞马达5的转速是否为零,方便确定打磨重负荷砂轮7或切割片17是否处于停止状态。测速开关11用于启动柱塞马达的转速测量,从而可以判定或计算柱塞马达5带动主轴9的转动速度以及重负荷砂轮7(切割片17)的速度。
联轴器13用于连接柱塞马达5和主轴9。
整个机械臂1通过另外配套的操控系统控制其运行动作,机械臂1的三段关节连接手臂之间可以实现相对角度调控,用于辅助控制打磨手腕与工件之间的相对位置和距离,也便于调控打磨角度。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
- 用于打磨机器人的机械臂和具有其的打磨机器人
- 一种用于机器人末端的打磨装置及其打磨方法