求机械换向的直流电动机的电动机轴转速和旋转角度的方法和设备
文献发布时间:2023-06-19 09:51:02
技术领域
本发明涉及一种用于由电动机电流的和电动机端子电压的在换向时出现的波纹的测量到的时间曲线来求取机械换向的直流电动机的电动机轴的转速和旋转角度的方法和设备。
背景技术
许多用于调整或者定位执行器(例如机动车中的车窗升降器或者座椅)的应用都是基于机械换向的直流电动机。这些应用需要准确地估计电动机转速和电动机位置,所述电动机转速和电动机位置能够由旋转角度来求取。电动机转速和电动机位置能够例如在使用位置传感器(例如霍尔传感器)的情况下来求取。然而,传感器的使用引起不必要的成本,如果可能的话,尤其是在批量应用时需要避免所述不必要的成本。
DE 197 29 238 C1说明了一种无传感器的位置识别方法,该位置识别方法基于对电动机电流的在换向时出现的波纹的测量到的时间曲线进行的分析利用。波纹(英语:ripple)能够作为用于机械换向的直流电动机的转速的尺度被检测和分析利用。这种波纹计数器通过检测和计数由直流电动机的换向引起的电流波纹来计算旋转角度(从而计算位置)。换向和随后的波纹产生取决于不同的内部因素和外部因素,例如电刷几何形状和换向器几何形状、电刷电阻和换向器电阻、环境温度等等。因此,在不利的条件下,尤其是当直流电动机的负载变化频繁或者直流电动机的电动机轴被阻塞时(这体现在电动机转速的突然降低上),单纯的对波纹进行计数以进行位置估计能够导致错误的结果。
US 9,046,543 B2公开了一种借助于快速傅里叶变换(FFT)确定机械换向的直流电动机的转速的方法,其中,转速作为FFT的结果被供应给卡尔曼滤波器,该卡尔曼滤波器在电动机状态模型中处理这个转速。所说明的处理方式的缺点是,FFT需要非常高的计算能力。
发明内容
本发明的任务是给出一种方法和一种设备,该方法和设备能够在功能上改进对机械换向的直流电动机的电机轴的转速和旋转角度的求取。
这些任务通过根据权利要求1的特征的方法和根据权利要求7的特征的设备来解决。由从属权利要求得出有利的构型方案。
根据第一方面,提出一种由电动机电流的和电动机端子电压的在换向时出现的波纹的(实时)测量到的时间曲线来求取机械换向的直流电动机的电动机轴的转速和旋转角度的方法。在这个方法中,直流电动机的测量到的电动机端子电压和测量到的电动机电流、估计的负载力矩、估计的转速和估计的旋转角度被作为输入参量供应给卡尔曼滤波器,该卡尔曼滤波器包括直流电动机的电动机状态模型。卡尔曼滤波器通过实施电动机状态模型提供直流电动机的估计的电流、修正的转速和修正的旋转角度作为输出参量。此外,波纹探测单元由作为输入参量的测量到的电动机电流的波纹和由卡尔曼滤波器修正的转速确定换向时间,并且由此导出直流电动机的估计的转速和估计的旋转角度并且将这些作为输入参量提供给卡尔曼滤波器。
根据本发明,为了提供电动机轴的更精确的转速和/或旋转角度而提出,卡尔曼滤波器的输出端和波纹探测单元在每个计算步骤中相互修正。这使得对电动机位置和转速的估计得到改善。
适宜地,直流电动机的由卡尔曼滤波器修正的转速和修正的旋转角度被作为输出参量供应给分析利用单元以便进一步处理。分析利用单元能够将修正的转速和修正的旋转角度例如用于操控直流电动机。直流电动机能够例如用于机动车的车窗升降器或者座椅。当然,别的需要高精度操控直流电动机的应用也是可能的。
另一个适宜的构型方案提出,卡尔曼滤波器将直流电动机的电流和/或修正的转速和/或修正的旋转角度通过电动机状态模型估计的状态中的一个或者多个状态与通过测量和估计波纹探测单元求取的值比较,并且在发现故障时通过形成估计值和观察值的加权的平均值进行过滤。换言之,过滤电流和/或修正的转速和/或电动机旋转角度。因此,卡尔曼滤波器的输出参量尽可能精确,并且代表被监控的机械换向的直流电动机的实际状态的最近似值和与之相关的应用。
另一个适宜的构型方案提出,通过负载估计单元由直流电动机的测量到的电动机端子电压、测量到的电动机电流和保存在负载估计单元中的电动机参数求取估计的负载力矩。实际应用中产生负载力矩的原因在于系统的摩擦、刚度和/或损耗,并且在实践中在没有附加的传感器的情况下不能够被测量。由于卡尔曼滤波器需要负载力矩来模拟电动机状态模型,因此通过负载估计单元提供扭矩计算模型,该扭矩计算模型能够借助于保存的电动机参数由测量到的电流和测量到的电动机端子电压来估计负载力矩。这样的负载估计单元的不同实施方案已由现有技术公开。
另一个适宜的构型方案提出,当在测量到的电动机电流的波形中观察到的波纹具有一主导频率时或者当在测量到的电动机电流的波形中观察到的波纹具有两个或者多个波纹频率时,波纹探测单元由被卡尔曼滤波器提供的修正的转速求取换向时间并且将其作为基准进行处理。如果机械换向的直流电动机是两极电动机,则在测量到的电动机电流的波形中观察到的波纹能够具有一主导频率。如果机械换向的直流电动机是四极电动机或者如果机械换向的直流电动机是具有不对称磁场的四极,该四极具有极性相同的两个磁铁,其中,在两个磁铁之间构成另一极性的虚拟极,则在测量到的电动机电流的波形中能够具有两个或者多个波纹频率。这样的电动机的优点是成本较低,因为只利用两个物理磁铁就能够“模拟”四极电动机。
另一个适宜的构型方案提出,卡尔曼滤波器、波纹探测单元和负载估计单元被实施为程序并且由计算单元实施。这能够实现在标准的微控制器上简单地实施所提出的方法。
根据本发明的第二方面,提出了一种计算机程序产品,其能够直接加载到数字计算单元的内存储器中并且包括软件代码区段,当产品在计算单元上运行时,利用软件代码区段实施本文说明的方法的步骤。计算机程序产品能够以数据载体(例如CD-ROM、DVD、USB存储盘或者存储卡)的形式体现。计算机程序产品也以能够通过无线网络或者有线网络加载的信号的形式存在。
根据本发明的第三方面,提出一种用于由电动机电流的和电动机端子电压的在换向时出现的波纹的测量到的时间曲线来求取机械换向的直流电动机的电动机轴的转速和旋转角度的设备。该设备构造用于将直流电动机的测量到的电动机端子电压和测量到的电动机电流、估计的负载力矩、估计的转速和估计的旋转角度作为输入参量供应给卡尔曼滤波器,该卡尔曼滤波器包括直流电动机的电动机状态模型。然后,卡尔曼滤波器通过实施电动机状态模型提供直流电动机的估计的电流、修正的转速和修正的旋转角度作为输出参量。该设备还构造用于利用波纹探测单元由作为输入参量的电动机电流的波纹和由卡尔曼滤波器修正的转速确定换向时间,并且由此导出直流电动机的估计的转速和估计旋转角度并且作为输入参量提供给卡尔曼滤波器。在提到的设备中,对电动机旋转角度或者电动机位置和/或转速的估计得到改善,其方式是,卡尔曼滤波器的输出端和波纹识别功能在控制的每个计算步骤中相互修正。除此之外,该设备还具有上述方法的其他优点。
附图说明
下面根据附图中的实施例对本发明进行更详细的说明。
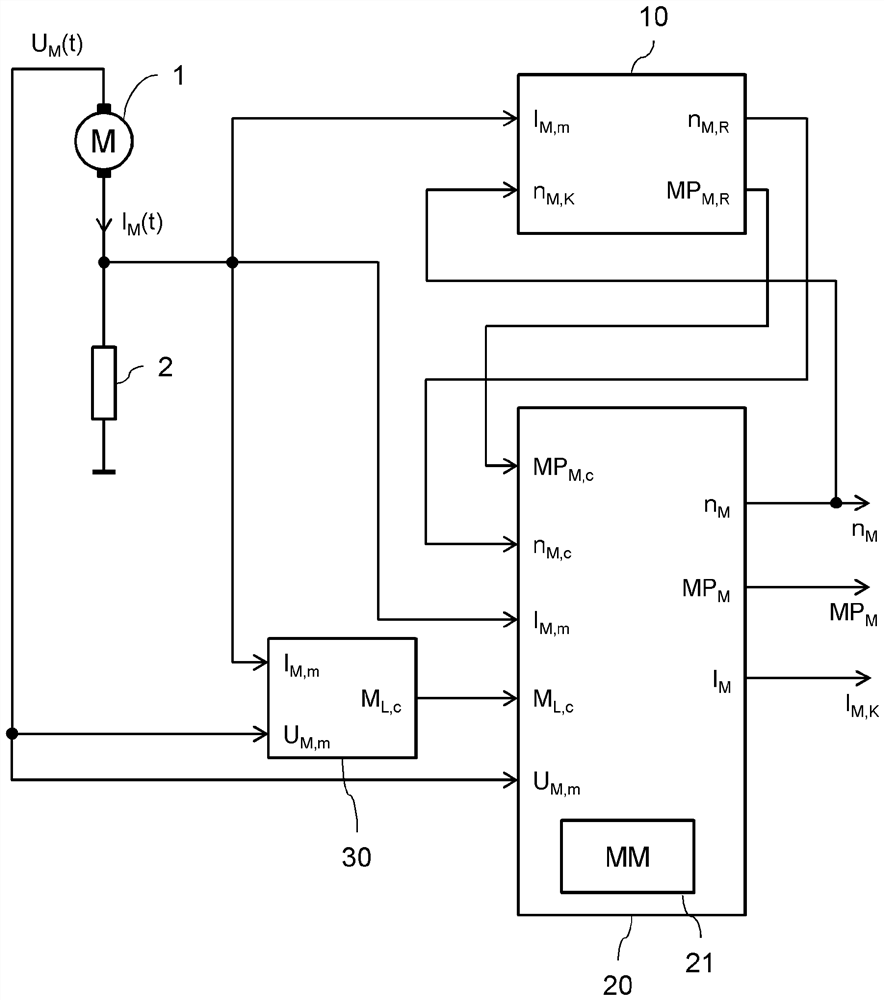
唯一的附图中示出用于实施根据本发明的方法所必需的部件的示意图。
具体实施方式
该附图是用于实施该方法的组件的示意性框图。由机械换向的直流电动机1(DC电动机)和测量电阻2组成的串联电路连接在电源电位和参考电位之间。通过未详细示出的传感器检测电动机端子电压U
波纹探测单元10、卡尔曼滤波器20和负载估计单元30能够实施为计算单元(例如微控制器)上的程序。
卡尔曼滤波器20包括直流电动机1的电动机状态模型21。电动机状态模型21能够例如如在开头提到的DE 197 29 238 C1中那样实现,为了被实施,该电动机状态模型除了需要测量到的电动机端子电压U
除了测量到的电动机电流I
换言之,卡尔曼滤波器20的输出端和波纹探测单元10在每个计算步骤中通过计算单元相互修正。这就使得对直流电动机1的电动机旋转角度MP
根据加权的平均值从卡尔曼滤波器20的输入参量的估计值和观察值中过滤出在输出中由于输出干扰或者受到噪声污染的观察而造成的误差。因此,卡尔曼滤波器的输出参量是最优的,并且代表了观察到的直流电动机1的实际状态的最近似值。
电动机状态模型21的设置在卡尔曼滤波器20中的映射需要在直流电动机1运行时存在的负载力矩M
波纹探测单元10能够间接地观察或者测量电动机转速n
为了基于波纹数来优化直流电动机1的位置检测或者旋转角度检测,在波纹探测单元10中适宜地实施下述处理方式:将卡尔曼滤波器20的电动机转速n
基于卡尔曼滤波器的方法的优点在于,通过利用波纹探测单元观察电动机转速和电动机旋转角度来修正通过电动机模型进行的转速估计和旋转角度估计中的不准确性,反之亦然。与现有技术中已知的标准电动机模型相比,这样的处理方式对于电动机参数的变化更加鲁棒。此外,为了实现准确的估计,强烈地降低频繁更新电动机参数的必要性。除此之外,对转速的更好的估计导致电动机参数的计算更加准确,而这又能够用于改进其他算法(例如转速控制或者平衡转矩)。
- 求机械换向的直流电动机的电动机轴转速和旋转角度的方法和设备
- 带旋转角度检测器的电动机、电动机的旋转角度检测器以及对具备换向器的电动机的旋转角度进行检测的方法