一种基于双变倍云台的目标识别方法及系统
文献发布时间:2023-06-19 09:51:02
技术领域
本发明涉及图像识别领域,具体为一种基于双变倍云台的目标识别方法及系统。
背景技术
无人机技术以广泛使用于电力巡检中,若要想观察输电线路的细节,则需要无人机抵近飞行或处于悬停状态,然后进行目标观察,但此时无人机与输电线路的距离过近,会导致无人机及输电线路的安全性降低,特别是在执行超高压线路巡检的时候;若在变倍视场下飞行,则只能在一种场景下进行目标识别,对于不同尺寸等级的目标无法做到同步执行,比如绝缘子和销钉尺寸差距较大,在能够识别到绝缘子的情况下,对于销钉的识别是有限的,在能够识别销钉的情况下,绝缘子往往又超出了视野范围。
由此,目前的无人机电力巡检方案不能有效解决远距离小目标和大目标同时进行多尺度、精确检测的问题。
发明内容
针对现有技术的不足,本发明提供了一种基于双变倍云台的目标识别方法及系统,其能够在无人机进行中远距离巡检时,同时对大目标和小目标电力器件同时进行精准、清晰的识别。
为实现上述目的,本发明提供如下技术方案:
提供了一种基于双变倍云台的目标识别方法,其包括如下步骤:
通过搭载在无人机上的第一成像设备获取包含第一目标的图像,并从中识别出第一目标;
根据第一目标与第二目标的关联性确定第二目标的方位,并对搭载在无人机上的第二成像设备进行变焦,以获取第二目标的图像,并从中识别出第二目标。
优选的,所述第一目标为绝缘子、连接金具、连接金具、均压环、避雷器中的一种或几种。
优选的,所述第一目标和第二目标的尺寸大小不同。
优选的,所述第二目标包括销钉。
还提供一种能实现上述目标识别方法的目标识别系统,其包括:
无人机;
第一成像设备,其搭载在所述无人机上,用于获取第一目标图像,并从中识别出第一目标;
关联性计算单元,其用于根据第一目标与第二目标的关联性确定第二目标的方位;
第二成像设备,其搭载在所述无人机上,用于根据所述第二目标的方位信息进行变焦,以获取第二目标的图像,并从中识别出第二目标。
优选的,所述第一成像设备包括搭载在无人机上的广角云台、连接所述广角云台的广角变焦镜头以及边缘计算模块,所述广角云台带动广角变焦镜头转动,所述广角变焦镜头获取包含有第一目标的图像,且将其发送至边缘计算模块,所述边缘计算模块从图像中识别出第一目标。
优选的,所述第二成像设备包括搭载在无人机上的长变焦云台以及连接所述长变焦云台的长焦相机,所述长变焦云台带动长焦相机转动至第二目标所在方位,然后长焦相机变焦,获取第二目标的图像。
与现有技术相比,本发明具备以下有益效果:
本发明先通过广角变焦镜头搜集视野中的大部件电力器件(即第一目标)的图像信息,并通过边缘计算模块对其进行精准识别,再根据第一目标和第二目标之间的关联性确定第二目标的位置,进一步通过长焦相机的变焦实现对第二目标的高精度检测,因此,其可以在同一场景下同时对大目标和小目标电力器件进行精准、清晰的识别。
附图说明
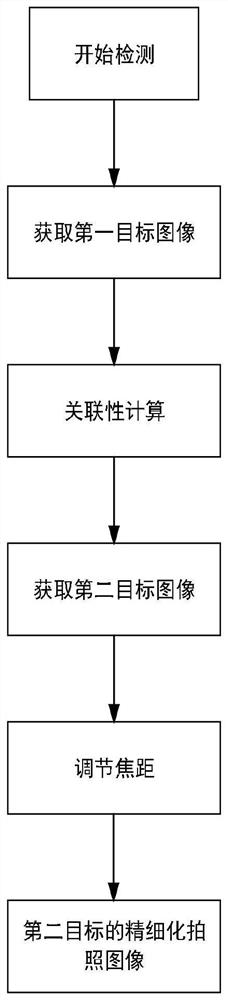
图1为本发明中基于双变倍云台的目标识别方法的步骤流程图;
图2为本发明中第一目标的识别结果图;
图3为本发明中第二目标的识别结果图;
图4为本发明中目标识别系统的结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1:
如图1所示,本实施例中基于双变倍云台的目标识别方法可适用于基于无人机的电力巡检,该方法具体包括:
S1、无人机飞行至预定高度,如飞行至与输电线路高度基本一致的位置;
S2、如图2所示,通过搭载在无人机上的第一成像设备获取包含第一目标P1的图像,并从中识别出第一目标P1;其中,所述第一成像设备包括搭载在无人机上的广角云台、连接所述广角云台的广角变焦镜头以及边缘计算模块,所述广角云台带动广角变焦镜头转动,所述广角变焦镜头获取包含有第一目标P1的图像,且将其发送至边缘计算模块,所述边缘计算模块从图像中识别出第一目标P1;
所述第一目标为输电线路上的主要电力器件,如绝缘子、连接金具、连接金具、均压环、避雷器等中的一种或几种,其直接在输电过程中发挥线路连接、固定、导电等作用,一般为大部件器件;
S3、如图3所示,根据第一目标P1与第二目标P2的关联性确定第二目标P2的方位,并对搭载在无人机上的第二成像设备进行变焦,以能够稳定的获取第二目标P2的图像(即第二目标的精细化拍摄图像),并从中识别出第二目标P2,所述第二目标P2可以有多个;其中,所述第一目标P1和第二目标P2的尺寸大小不同(该尺寸大小根据本领域技术人员的普通认知进行确定,且按照常规观念,第一目标P1的尺寸大于第二目标P2),第二目标P2为输电线路上的辅助电力器件,包括连接销钉等,其一般用于对上述主要电力器件进行辅助连接和固定,多为小部件器件;所述第二成像设备包括搭载在无人机上的长变焦云台以及连接所述长变焦云台的长焦相机,所述长变焦云台带动长焦相机转动至第二目标P2所在方位,然后长焦相机变焦,获取第二目标P2的图像;所述关联性包括第一目标P1、第二目标P2两者间的相对位置关系,如玻璃绝缘子两端连接有连接金具,连接金具边缘位置设有销钉及销钉缺失类目标;陶瓷、复合绝缘子底部存在均压环、连接金具,连接金具边缘位置存在销钉及销钉缺失类目标等,因此,通过获取的第一目标P2图像确定第一目标P2的位置,进一步据此推算出第二目标P2的大致方位。
由此,本实施例中设置有广角变焦镜头和长焦相机,当无人机进行中远距离电力巡检任务时,其先通过广角变焦镜头搜集视野中的大部件电力器件(即第一目标)的图像信息,并通过边缘计算模块对其进行精准识别,再根据第一目标和第二目标之间的关联性确定第二目标的位置,进一步通过长焦相机的变焦实现对第二目标的高精度检测,因此,其可以在同一场景下同时对大目标和小目标电力器件进行精准、清晰的识别。
实施例2:
本实施例提供了一种能实现实施例1中目标识别方法的目标识别系统,如图4所示,其包括:
无人机1;
第一成像设备2,其搭载在所述无人机1上,用于获取第一目标P1图像,并从中识别出第一目标P1;
关联性计算单元3,其用于根据第一目标P1与第二目标P2的关联性确定第二目标P2的方位;
第二成像设备4,其搭载在所述无人机1上,用于根据所述第二目标P2的方位信息进行变焦,以获取第二目标P2的图像,并从中识别出第二目标P2。
其他相关技术特征,诸如第一目标P1、第二目标P2的定义等与实施例1相同,在此不再赘述。
综上所述,本发明即可满足无人机在中远距离进行电力巡检的需求,其设置有广角变焦镜头和长焦相机,先通过广角变焦镜头搜集视野中的大部件电力器件(即第一目标)的图像信息,并通过边缘计算模块对其进行精准识别,再根据第一目标和第二目标之间的关联性确定第二目标的位置,进一步通过长焦相机的变焦实现对第二目标的高精度检测,因此,其可以在同一场景下同时对大目标和小目标电力器件进行精准、清晰的识别。
需要说明的是,上述实施例1-3中的技术特征可进行任意组合,且组合而成的技术方案均属于本申请的保护范围。在本文中,诸如术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种基于双变倍云台的目标识别方法及系统
- 一种基于双变倍云台的目标纠偏方法及系统