一种全解耦二维纳米柔性运动平台
文献发布时间:2023-06-19 09:51:02
技术领域
本发明涉及纳米级位移输出技术领域,具体而言,涉及一种全解耦二维纳米柔性运 动平台。
背景技术
相关技术中的二维纳米柔性运动平台,两轴运动耦合误差大,影响电机的位移输出 和采用光栅传感器的位移测量精度,特别是大行程情况下,影响二维纳米柔性运动平台的精度。
发明内容
本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种全解 耦二维纳米柔性运动平台,该二维纳米柔性运动平台具有完全解耦、精度高、成本低和安装使用方便等优点。
为实现上述目的,根据本发明的实施例提出一种二维纳米柔性运动平台,所述二维纳米 柔性运动平台包括:基座;终端平台,所述终端平台位于所述基座的外边沿的内侧;两 个X向二级运动平台和两个Y向二级运动平台,两个所述X向二级运动平台沿X向定向 且两个所述Y向二级运动平台沿Y向定向;两个X向三级运动平台和两个Y向三级运动 平台,两个所述X向三级运动平台沿X向定向且两个所述Y向三级运动平台沿Y向定向; 两个X向双平行四边形板簧导向件,两个所述X向双平行四边形板簧导向件分别与所述 X向三级运动平台相连以使两个所述X向三级运动平台沿X向运动,每个所述X向双平 行四边形板簧导向件与所述基座相连;两个Y向双平行四边形板簧导向件,两个所述Y 向双平行四边形板簧导向件分别与所述Y向三级运动平台相连以使两个所述Y向三级运 动平台沿Y向运动,每个所述Y向双平行四边形板簧导向件与所述基座相连;四个X向 双平行四边形板簧解耦件,四个所述X向双平行四边形板簧解耦件分别与两个所述X向 二级运动平台的两端相连,其中两个所述X向双平行四边形板簧解耦件分别与两个所述 X向三级运动平台相连,另外两个所述X向双平行四边形板簧解耦件分别与所述终端平 台相对的两侧壁相连;四个Y向双平行四边形板簧解耦件,四个所述Y向双平行四边形 板簧解耦件分别与两个所述Y向二级运动平台的两端相连,其中两个所述Y向双平行四 边形板簧解耦件分别与两个所述Y向三级运动平台相连,另外两个所述Y向双平行四边 形板簧解耦件分别与所述终端平台相对的两侧壁相连;两个X向三折板簧导向件,两个 所述X向三折板簧导向件分别与所述X向二级运动平台的中部相连以使两个所述X向二 级运动平台沿X向运动,每个所述X向三折板簧导向件与所述基座相连;两个Y向三折 板簧导向件,两个所述Y向三折板簧导向件分别与所述Y向二级运动平台的中部相连以 使两个所述Y向二级运动平台沿Y向运动,每个所述Y向三折板簧导向件与所述基座相 连;四个X向三层双折板簧导向件,四个所述X向三层双折板簧导向件分别与所述X向 二级运动平台的两端相连以使两个所述X向二级运动平台沿X向运动,每个所述X向三 层双折板簧导向件与所述基座相连;四个Y向三层双折板簧导向件,四个所述Y向三层 双折板簧导向件分别与所述Y向二级运动平台的两端相连以使两个所述Y向二级运动平 台沿Y向运动,每个所述Y向三层双折板簧导向件与所述基座相连;方形板簧冗余约束件,所述终端平台通过两个所述方形板簧冗余约束件与所述基座相连。
根据本发明实施例的二维纳米柔性运动平台,具有完全解耦、精度高、成本低和安装使 用方便等优点。
另外,根据本发明上述实施例的二维纳米柔性运动平台还可以具有如下附加的技术特 征:
根据本发明的一个实施例,两个所述X向双平行四边形板簧导向件在X向上对称设置, 两个所述Y向双平行四边形板簧导向件在Y向上对称设置,四个所述X向双平行四边形板簧解耦件在X向上对称设置,四个所述Y向双平行四边形板簧解耦件在Y向上对称设 置,两个所述X向三折板簧导向件在X向上对称设置,两个所述Y向三折板簧导向件在 Y向上对称设置,四个所述X向三层双折板簧导向件在X向上对称设置,四个所述Y向 三层双折板簧导向件在Y向上对称设置。这样便于提高所述全解耦二维纳米柔性运动平 台各个方向性能的一致性。
进一步地,每个X向双平行四边形板簧导向件包括X向双平行四边形板簧导向件内侧板簧和X向双平行四边形板簧导向件外侧板簧,两个所述X向双平行四边形板簧导向 件内侧板簧分别与所述X向三级运动平台的两端相连,所述X向双平行四边形板簧导向 件外侧板簧位于所述X向双平行四边形板簧导向件内侧板簧的外侧且均与所述基座相 连,所述X向双平行四边形板簧导向件内侧板簧和所述X向双平行四边形板簧导向件外 侧板簧通过刚性连接件相连;每个Y向双平行四边形板簧导向件包括Y向双平行四边形 板簧导向件内侧板簧和Y向双平行四边形板簧导向件外侧板簧,两个所述Y向双平行四 边形板簧导向件内侧板簧分别与所述Y向三级运动平台的两端相连,所述Y向双平行四 边形板簧导向件外侧板簧位于所述Y向双平行四边形板簧导向件内侧板簧的外侧且均与 所述基座相连,所述Y向双平行四边形板簧导向件内侧板簧和所述Y向双平行四边形板 簧导向件外侧板簧通过刚性连接件相连。这样可以实现所述X向双平行四边形板簧导向 件、所述Y向双平行四边形板簧导向件、所述X向三级运动平台、所述Y向三级运动平 台、所述基座的柔性连接。
进一步地,每个X向双平行四边形板簧解耦件包括X向双平行四边形板簧解耦件内侧板 簧和X向双平行四边形板簧解耦件外侧板簧,四个所述X向双平行四边形板簧解耦件内侧板 簧分别与两个所述X向二级运动平台的两端相连,其中两个所述X向双平行四边形板簧解耦 件外侧板簧分别与两个所述X向三级运动平台相连,另外两个所述X向双平行四边形板簧解 耦件外侧板簧分别与所述终端平台相对的两侧壁相连,所述X向双平行四边形板簧解耦件内 侧板簧和所述X向双平行四边形板簧解耦件外侧板簧通过刚性连接件相连;每个Y向双平行 四边形板簧解耦件包括Y向双平行四边形板簧解耦件内侧板簧和Y向双平行四边形板簧解耦 件外侧板簧,四个所述Y向双平行四边形板簧解耦件内侧板簧分别与两个所述Y向二级运动 平台的两端相连,其中两个所述Y向双平行四边形板簧解耦件外侧板簧分别与两个所述Y向 三级运动平台相连,另外两个所述Y向双平行四边形板簧解耦件外侧板簧分别与所述终端平 台相对的两侧壁相连,所述Y向双平行四边形板簧解耦件内侧板簧和所述Y向双平行四边形 板簧解耦件外侧板簧通过刚性连接件相连。这样可以实现所述X向双平行四边形板簧解耦 件、所述Y向双平行四边形板簧解耦件、所述X向三级运动平台、所述Y向三级运动平 台、所述X向二级运动平台、所述Y向二级运动平台、所述终端平台、所述基座的柔性 连接。
进一步地,每个X向三层双折板簧导向件包括X向三层双折板簧导向件固定侧板簧和X向三层双折板簧导向件运动侧板簧,四个所述X向三层双折板簧导向件运动侧板簧 分别与两个所述X向二级运动平台的两端相连,四个所述X向三层双折板簧导向件固定 侧板簧分别与所述基座相连,所述X向三层双折板簧导向件固定侧板簧和所述X向三层 双折板簧导向件运动侧板簧通过刚性连接件相连;每个Y向三层双折板簧导向件包括Y 向三层双折板簧导向件固定侧板簧和Y向三层双折板簧导向件运动侧板簧,四个所述Y 向三层双折板簧导向件运动侧板簧分别与两个所述Y向二级运动平台的两端相连,四个 所述Y向三层双折板簧导向件固定侧板簧分别与所述基座相连,所述Y向三层双折板簧 导向件固定侧板簧和所述Y向三层双折板簧导向件运动侧板簧通过刚性连接件相连。这 样可以实现所述X向三层双折板簧导向件、所述Y向三层双折板簧导向件、所述X向二 级运动平台、所述Y向二级运动平台、所述基座的柔性连接。
进一步地,方形板簧冗余约束件包括上层方形板簧冗余约束件和下层方形板簧冗余 约束件,下层方形板簧冗余约束件包括两个固定凸台与基座相连,方形板簧冗余约束件中部包括移动导杆分别与上层方形板簧冗余约束件和下层方形板簧冗余约束件相连,上层方形板簧冗余约束件包括两个凸台与终端平台相连。这样可以所述方形板簧冗余约束件、所述终端平台、所述基座的柔性连接。
进一步地,所述X向三层双折板簧导向件和所述Y向三层双折板簧导向件在竖直方向上的高度低于所述X向三折板簧导向件和所述Y向三折板簧导向件。这样可以便于所 述X向三层双折板簧导向件和所述Y向三层双折板簧导向件避让所述X向双平行四边形 板簧解耦件和所述Y向双平行四边形板簧解耦件。
可选地,所述基座包括:基板;八个第一连接凸台,八个所述第一连接凸台在所述基 板的上表面间隔设置,每个所述X向三层双折板簧导向件固定侧板簧分别与X向所述第一连接凸台相连,每个所述Y向三层双折板簧导向件固定侧板簧分别与Y向所述第一连 接凸台相连;四个第二连接凸台,四个所述第二连接凸台在所述基板的上表面间隔设置, 每个所述X向三折板簧导向件的两端分别与相邻的两个所述第二连接凸台相连,每个所 述Y向三折板簧导向件的两端分别与相邻的两个所述第二连接凸台相连;八个第三连接 凸台,八个所述第三连接凸台在所述基板的上表面间隔设置,每个所述X向双平行四边 形板簧导向件内侧板簧分别与X向两个所述第三连接凸台相连,每个所述Y向双平行四 边形板簧导向件内侧板簧分别与Y向两个所述第三连接凸台相连。这样可以便于所述板 簧连接在基座上。
本发明具有如下有益的技术效果:
本发明提供了一种全解耦二维纳米柔性运动平台,该纳米柔性运动平台通过引入四个X 向双平行四边形板簧解耦件和四个Y向双平行四边形板簧解耦件实现了X向三级运动平 台和Y向三级运动平台的完全解耦,提高了驱动器的直线驱动精度和便携式光栅传感器 的测量精度(专利ZL 201710455030.5所述测量方法)。纳米柔性运动平台采用空间双层设计的三层双折板簧导向件、三折板簧导向件和双平行四边形板簧导向件实现运动的导向,提高了空间结构的紧凑性,有效抑制寄生运动,有效避免运动行程中的非线性因 素,有利于二维纳米柔性运动平台控制系统的实现。此外,方形板簧冗余约束件的引入, 有效抑制终端平台沿竖直方向的寄生运动,增大了平台的负载能力。
本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得 明显,或通过本发明的实践了解到。
附图说明
本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明 显和容易理解,其中:
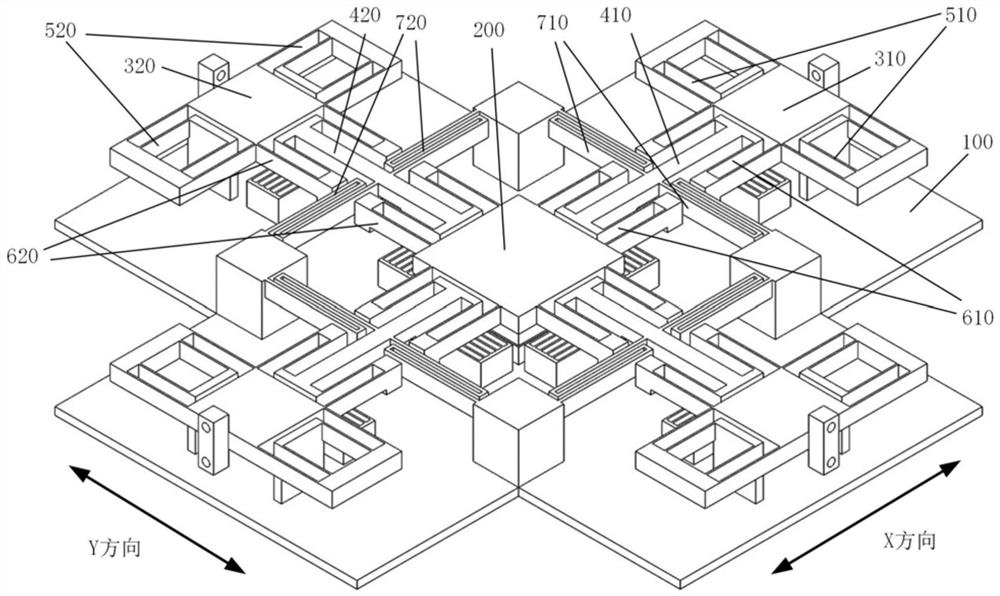
图1是根据本发明实施例的全解耦二维纳米柔性运动平台的结构示意图。
图2是根据本发明实施例的全解耦二维纳米柔性运动平台的水平横截面结构示意图。
图3是根据本发明实施例的全解耦二维纳米柔性运动平台的俯视结构示意图。
图4是根据本发明实施例的全解耦二维纳米柔性运动平台的竖直横截面结构示意图。
图5是根据本发明实施例的方形板簧冗余约束件变形结构示意图。
图6是根据本发明实施例的全解耦二维纳米柔性运动平台的结构示意图。
附图标记:基座100、终端平台200、X向二级运动平台410、Y向二级运动平台420、X向三级运动平台310、Y向三级运动平台320、X向双平行四边形板簧导向件510、Y向 双平行四边形板簧导向件520、X向双平行四边形板簧解耦件610、Y向双平行四边形板 簧解耦件620、X向三折板簧导向件710、Y向三折板簧导向件720、X向三层双折板簧 导向件810、Y向三层双折板簧导向件820、方形板簧冗余约束件900。
具体实施方式
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相 同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附 图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
下面参考附图描述根据本发明实施例的全解耦二维纳米柔性运动平台。
如图1-图4所示,根据本发明实施例的全解耦二维纳米柔性运动平台包 括基座100、终端平台200、X向二级运动平台410、Y向二级运动平台420、 X向三级运动平台310、Y向三级运动平台320、X向双平行四边形板簧导向 件510、Y向双平行四边形板簧导向件520、X向双平行四边形板簧解耦件610、 Y向双平行四边形板簧解耦件620、X向三折板簧导向件710、Y向三折板簧 导向件720、X向三层双折板簧导向件810、Y向三层双折板簧导向件820、方形板簧冗余约束件900(X方向和Y方向如图1-图2中箭头所示)。这里 需要理解的是X向、Y向仅为了便于表述,并非对于二维纳米柔性运动平台 1实际设置方向的限定。
终端平台200位于基座100的外边沿的内侧。X向二级运动平台410沿X向定向且Y向二级运动平台420沿Y向定向。X向三级运动平台310沿X向定向且Y向三级运动平 台320沿Y向定向。X向双平行四边形板簧导向件510分别与X向三级运动平台310相 连以使两个X向三级运动平台310沿X向运动,每个X向双平行四边形板簧导向件510 与基座100相连。Y向双平行四边形板簧导向件520分别与Y向三级运动平台320相连 以使两个Y向三级运动平台320沿Y向运动,每个Y向双平行四边形板簧导向件520与 基座100相连。四个X向双平行四边形板簧解耦件610分别与X向二级运动平台410的 两端相连,其中两个X向双平行四边形板簧解耦件610分别与X向三级运动平台310相 连,另外两个X向双平行四边形板簧解耦件610分别与终端平台200相对的两侧壁相连。 四个Y向双平行四边形板簧解耦件620分别与Y向二级运动平台420的两端相连,其中 两个Y向双平行四边形板簧解耦件620分别与Y向三级运动平台320相连,另外两个Y 向双平行四边形板簧解耦件620分别与终端平台200相对的两侧壁相连。X向三折板簧 导向件710分别与X向二级运动平台410的中部相连以使X向二级运动平台410沿X向 运动,X向三折板簧导向件710与基座100相连。Y向三折板簧导向件720分别与Y向 二级运动平台420的中部相连以使Y向二级运动平台420沿Y向运动,Y向三折板簧导 向件720与基座100相连。X向三层双折板簧导向件810与X向二级运动平台410的两 端相连以使X向二级运动平台410沿X向运动,X向三层双折板簧导向件810与基座100 相连。Y向三层双折板簧导向件820与Y向二级运动平台420的两端相连以使Y向二级 运动平台420沿Y向运动,Y向三层双折板簧导向件820与基座100相连。终端平台200 通过方形板簧冗余约束件900与基座100相连。
根据本发明的一个实施例,X向双平行四边形板簧导向件510在X向上对称设置,Y向双平行四边形板簧导向件520在Y向上对称设置,X向双平行四边形板簧解耦件610 在X向上对称设置,Y向双平行四边形板簧解耦件620在Y向上对称设置,X向三折板 簧导向件710在X向上对称设置,Y向三折板簧导向件720在Y向上对称设置,X向三 层双折板簧导向件810在X向上对称设置,Y向三层双折板簧导向件820在Y向上对称 设置。这样便于提高全解耦二维纳米柔性运动平台各个方向性能的一致性。
进一步地,每个X向双平行四边形板簧导向件510包括X向双平行四边形板簧导向件内侧板簧和X向双平行四边形板簧导向件外侧板簧,X向双平行四边形板簧导向件内 侧板簧分别与X向三级运动平台310的两端相连,X向双平行四边形板簧导向件外侧板簧 位于X向双平行四边形板簧导向件内侧板簧的外侧且均与基座100相连,X向双平行四 边形板簧导向件内侧板簧和X向双平行四边形板簧导向件外侧板簧通过刚性连接件相 连;每个Y向双平行四边形板簧导向件520包括Y向双平行四边形板簧导向件内侧板簧 和Y向双平行四边形板簧导向件外侧板簧,Y向双平行四边形板簧导向件内侧板簧分别 与Y向三级运动平台320的两端相连,Y向双平行四边形板簧导向件外侧板簧位于Y向双 平行四边形板簧导向件内侧板簧的外侧且均与基座100相连,Y向双平行四边形板簧导 向件内侧板簧和Y向双平行四边形板簧导向件外侧板簧通过刚性连接件相连。这样可以 实现X向双平行四边形板簧导向件510、Y向双平行四边形板簧导向件520、X向三级运 动平台310、Y向三级运动平台320、基座100的柔性连接。
进一步地,每个X向双平行四边形板簧解耦件610包括X向双平行四边形板簧解耦件内 侧板簧和X向双平行四边形板簧解耦件外侧板簧,X向双平行四边形板簧解耦件内侧板簧分 别与X向二级运动平台410的两端相连,其中X向双平行四边形板簧解耦件外侧板簧分别与 X向三级运动平台310相连,另外X向双平行四边形板簧解耦件外侧板簧分别与终端平台200 相对的两侧壁相连,X向双平行四边形板簧解耦件内侧板簧和X向双平行四边形板簧解耦件 外侧板簧通过刚性连接件相连;每个Y向双平行四边形板簧解耦件620包括Y向双平行四边 形板簧解耦件内侧板簧和Y向双平行四边形板簧解耦件外侧板簧,Y向双平行四边形板簧解 耦件内侧板簧分别与Y向二级运动平台420的两端相连,其中Y向双平行四边形板簧解耦件 外侧板簧分别与Y向三级运动平台320相连,另外Y向双平行四边形板簧解耦件外侧板簧分 别与终端平台200相对的两侧壁相连,Y向双平行四边形板簧解耦件内侧板簧和Y向双平行 四边形板簧解耦件外侧板簧通过刚性连接件相连。这样可以实现X向双平行四边形板簧解 耦件610、Y向双平行四边形板簧解耦件620、X向三级运动平台310、Y向三级运动平 台320、X向二级运动平台410、Y向二级运动平台420、终端平台200、基座100的柔 性连接。
进一步地,每个X向三层双折板簧导向件810包括X向三层双折板簧导向件固定侧板簧和X向三层双折板簧导向件运动侧板簧,X向三层双折板簧导向件运动侧板簧分别 与X向二级运动平台410的两端相连,X向三层双折板簧导向件固定侧板簧分别与基座 100相连,X向三层双折板簧导向件固定侧板簧和X向三层双折板簧导向件运动侧板簧 通过刚性连接件相连;每个Y向三层双折板簧导向件820包括Y向三层双折板簧导向件 固定侧板簧和Y向三层双折板簧导向件运动侧板簧,Y向三层双折板簧导向件运动侧板 簧分别与Y向二级运动平台420的两端相连,Y向三层双折板簧导向件固定侧板簧分别 与基座100相连,Y向三层双折板簧导向件固定侧板簧和Y向三层双折板簧导向件运动 侧板簧通过刚性连接件相连。这样可以实现X向三层双折板簧导向件810、Y向三层双 折板簧导向件820、X向二级运动平台410、Y向二级运动平台420、基座100的柔性连 接。
进一步地,方形板簧冗余约束件900包括上层方形板簧冗余约束件和下层方形板簧 冗余约束件,下层方形板簧冗余约束件包括两个固定凸台与基座100相连,方形板簧冗余约束件900中部包括移动导杆分别与上层方形板簧冗余约束件和下层方形板簧冗余约束件相连,上层方形板簧冗余约束件包括两个凸台与终端平台200相连。这样可以方形 板簧冗余约束件900、终端平台200、基座100的柔性连接。图5所示为方形板簧冗余 约束件900的变形示意图。
进一步地,X向三层双折板簧导向件810和Y向三层双折板簧导向件820在竖直方向上的高度低于X向三折板簧导向件710和Y向三折板簧导向件720。这样可以便于X向 三层双折板簧导向件810和Y向三层双折板簧导向件820避让X向双平行四边形板簧解耦件 610和Y向双平行四边形板簧解耦件620。
可选地,基座100包括:基板;八个第一连接凸台,八个第一连接凸台在基板的上表面间隔设置,每个X向三层双折板簧导向件固定侧板簧分别与X向第一连接凸台相连, 每个Y向三层双折板簧导向件固定侧板簧分别与Y向第一连接凸台相连;四个第二连接 凸台,第二连接凸台在基板的上表面间隔设置,每个X向三折板簧导向件710的两端分 别与相邻的第二连接凸台相连,每个Y向三折板簧导向件720的两端分别与相邻的第二 连接凸台相连;八个第三连接凸台,八个第三连接凸台在基板的上表面间隔设置,每个 X向双平行四边形板簧导向件内侧板簧分别与X向第三连接凸台相连,每个Y向双平行 四边形板簧导向件内侧板簧分别与Y向第三连接凸台相连。这样可以便于板簧连接在基 座100上。
根据本发明实施例的全解耦二维纳米柔性运动平台,具有完全解耦、精度高、成本低和使用方便等优点。通过如图6所示的采用光栅传感器的测量方式,可以实现全解耦 二维纳米柔性运动平台的精确测量。
根据本发明实施例的二维纳米柔性运动平台的其他构成及操作对于本领域普通技术 人员而言都是已知的,这里不再详细描述。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、 “宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、 “水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径 向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了 便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方 位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,限定有“第一”、 “第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中, 除非另有说明,“多个”的含义是两个或两个以上。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或 一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒 介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体 情况理解上述术语在本发明中的具体含义。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示 例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结 构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的 示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特 点可以在任何的一个或多个实施例或示例中以合适的方式结合。
尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱 离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。