结合VR技术的数字化手术系统
文献发布时间:2023-06-19 09:52:39
技术领域
本发明属于医疗设备技术领域,尤其涉及一种数字化手术系统。
背景技术
数字一体化手术室是随着微创技术的发展而涎生的一个新的医疗项目,数字一体化手术室是将手术室内的全部参数均集中监控和集中显示的具有高效率和高安全性的手术室,是提升手术室对外交流平台为目的多个系统(如医学、工控、通讯、数码等)的综合运用。
数字化医院是未来医院的发展方向,而作为医院核心的外科手术室则是重中之重,一体化手术室系统的建设是医院实现数字化管理的标志工程。数字化手术室是指将现代化数字技术应用在手术室的工作环境中,利用一些软硬件设施,在洁净手术室内建立完整的手术室信息管理系统。数字一体化手术室将净化工程与数字信息化相融合,将所有关于患者的信息以最佳方式进行系统集成,不仅能让医护人员实时获取、查询并记录患者的全面的相关信息;同时还可以实现医学影像与手术状况影像双向传输以及医疗远程的实时视讯会诊,为整个手术提供更加准确、更加安全、更加高效的工作环境。数字化医院还与医院信息系统相集成,实现手术科室事务全面数字化管理,也为手术观摩、手术示教、远程教学及远程会诊提供了可靠的通道,从而实现了手术室的高成功率、高效率、以及高安全性,并提升了手术室的对外交流。与传统的手术室相比,它优化了手术的工作流程,提高了医护人员的工作效率;满足了临床教学的需要,提升了手术室内的洁净度,同时还可自动保存术中信息,满足科研和医疗举证之用。
因此,提供一种操作简便、智能化程度高、功能全面,能实现多种资讯的整合与集中控制,同时实现远程示教和远程会诊,并对多个手术室集中控制管理的结合VR技术的数字化手术系统成为业内急需解决的问题。
发明内容
本发明的目的是提供一种结合VR技术的数字化手术系统,该结合VR技术的数字化手术系统能够实现多种资讯的整合与集中控制,同时能够实现远程示教和远程会诊。
为了实现上述目的,本发明提供了一种结合VR技术的数字化手术系统,包括:数字总控装置、与数字总控装置通信连接的至少一个数字手术室、以及与每一个数字手术室通信连接用于演示手术视频的影音演示装置,每一个数字手术室包括:通过局域网与数字总控装置通信连接的中央控制器、与中央控制器通信连接的一体化手术台、与中央控制器通信连接以将拍摄的手术过程的若干个全景摄像头、布设于数字手术室的内部的若干个VR摄像头、与每一个全景摄像头通信连接以同步显示手术过程的无菌液晶显示器、与影音演示装置通信连接以于手术过程中进行视频交流的视频通讯装置、以及用于操控手术器械的数控机器人,其中,全景摄像头与中央控制器通信连接以将拍摄的手术过程存储于中央控制器的存储单元,数字手术室的顶壁设有若干条摄像轨道,每一条摄像轨道上设有沿摄像轨道的轨迹进行运动的中央悬臂,中央悬臂包括自摄像轨道向下延伸的滑动端以及与滑动端的延伸末端相连接的自由端,滑动端的长度可伸缩调节,若干个VR摄像头通过旋转接头与自由端相连接以实现全方位自由旋转并寻找最佳摄影角度;结合VR技术的数字化手术系统还设置有远程VR控制室,远程VR控制室包括:VR头盔以及控制手柄,VR头盔与VR摄像头通信连接以实时显示数字手术室内的虚拟场景,控制手柄与数控机器人通信连接以远程控制数控机器人的动作。
可选择地,进一步包括设置于数控机器人的机械手臂上的至少一个压电式传感器以测量机械手臂在操作手术器械时所施加的力并将测得的电信号传送至中央控制器,控制手柄上进一步设置反作用力施加装置以根据中央控制器的指令向控制手柄施加与机械手臂对应的反作用力以增强远程操作人员的VR控制体验。
可选择地,包括分别设置于数控机器人的两条机械手臂上的六个压电式传感器,每条机械手臂的用于抓握手术器械的握持部、腕部及肘部分别设置一个压电式传感器。
可选择地,反作用力施加装置包括至少一个偏心轮振动器。
可选择地,进一步包括设置于控制手柄上的至少一个陀螺仪传感器以测量控制手柄在虚拟操作时的位置移动并将测得的电信号传送至中央控制器,数控机器人的机械手臂上进一步设置移动跟踪装置以根据中央控制器的指令进行与控制手柄相应的位置移动。
可选择地,移动跟踪装置包括至少一个直线运动电机以及至少一个旋转运动电机。
可选择地,每一个数字手术室进一步包括:设置于数字手术室的内部的若干个无影灯摄像头以及若干个腹腔镜摄像头,每个无影灯摄像头及每个腹腔镜摄像头分别与中央控制器通信连接以将拍摄的手术过程存储于中央控制器的存储单元,每个无影灯摄像头及每个腹腔镜摄像头分别与无菌液晶显示器通信连接以于数字手术室内实时观测手术过程。
可选择地,数字手术室的顶壁设有视频轨道,视频通讯装置通过滑杆安装于视频轨道上,滑杆内设有感应器,视频通讯装置包括:手势识别装置、若干个分散设置于视频通讯装置正面的激光发射器、以及若干个设置于两个相邻的激光发射器之间的红外传感器,其中,手势识别装置与滑杆内的感应器通信连接,使得滑杆根据手势识别装置的反应手势在视频轨道上滑动以改变视频通讯装置的视频位置和视频角度。
可选择地,无菌液晶显示器与中央控制器通信连接,无菌液晶显示器包括查询单元及记录单元,其中,查询单元用于查找中央控制器的存储单元中患者资料,记录单元用于记录手术过程中的事项。
可选择地,一体化手术台的两侧分别设置定位保护屏障,每个定位保护屏障设置至少三个操作窗口以供数控机器人所操控的手术器械穿过。
可选择地,每个操作窗口分别设置窗口活动盖板使得仅在需要对相应区域进行操作时才开启对应的操作窗口以增强操作安全性。
可选择地,定位保护屏障及窗口活动盖板采用聚碳酸酯树脂镜片材料。
可选择地,影音演示装置包括设置于医院内的远程会议室以及通过医院局域网登录的所有影音演示单元。
可选择地,数字总控装置设置于一个或多个总控室内,数字总控装置包括若干个手术转播屏及对应的数据输入控制台,以通过若干个手术转播屏同时观看多个数字手术室的实时转播或同时观看一个数字手术室的多方位手术视频转播。
可选择地,一体化手术台上设有用于调节手术台高度的升降按钮、用于水平方向旋转手术台的旋转按钮以及用于调节手术台水平倾角的坡度按钮。
可选择地,VR头盔包括用于显示VR虚拟图像的主显示屏、以及设于主显示屏一侧的用于显示视频通讯装置的图像的小显示屏。由此,远程VR控制室内的操作者可在需要与数字手术室内的其他工作人员沟通时开启小显示屏进行视频通话。可选择地,设置开关按钮以在不需要使用时关闭小显示屏以避免影响操作者工作。
可选择地,小显示屏设于主显示屏的下方或左/右侧。
本发明的有益效果是:(1)、本发明的结合VR技术的数字化手术系统智能化程度高、功能全面、操作简便,能实现多种资讯的整合与集中控制,同时实现远程示教和远程会诊,方便对多个手术室的集中控制管理;(2)、多种传感器、反作用力施加装置以及移动跟踪装置的设置确保控制手柄对机械手臂控制的灵敏度及准确度,增强了远程操作人员的VR控制体验;(3)、一体化结合VR技术的数字化手术系统为管理者提供有效的实用工具,医院可实时、有序、系统及监督性管理,提高医院设备资源利用率,完成医院病人信息的科学、系统的积累,提高诊疗保险,减少投资风险性,为医院创造极好的社会效益和经济效益。
附图说明
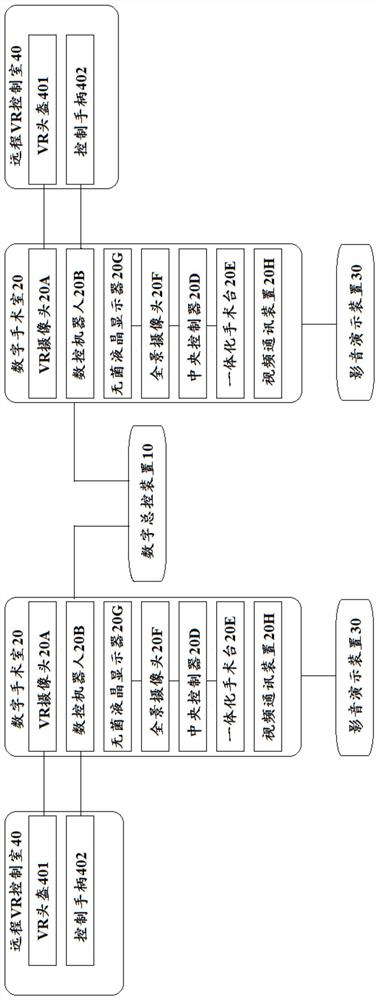
图1为本发明的结合VR技术的数字化手术系统的结构示意图。
图2为本发明的数字手术室的结构示意图。
图3为本发明的视频通讯装置的结构示意图。
具体实施方式
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
请参考图1,作为一种非限制性实施方式,本发明提供的结合VR技术的数字化手术系统包括:数字总控装置10、两个数字手术室20、两个影音演示装置30、以及两个远程VR控制室40。
每一个数字手术室20包括:VR摄像头20A、数控机器人20B、中央控制器20D、一体化手术台20E、全景摄像头20F、无菌液晶显示器20G、以及视频通讯装置20H。其中,全景摄像头20F与中央控制器20D通信连接,从而将拍摄的手术过程存储于中央控制器20D的存储单元(图未示),全景摄像头20F与无菌液晶显示器20G通信连接来实时显示手术过程影像,视频通讯装置20H与影音演示装置30通信连接以于手术过程中进行视频交流。
在该非限制性实施方式中,数字手术室20的顶壁设有若干条摄像轨道,每一条摄像轨道上设有沿摄像轨道的轨迹进行运动的中央悬臂,中央悬臂包括自摄像轨道向下延伸的滑动端以及与滑动端的延伸末端相连接的自由端,滑动端的长度可伸缩调节,自由端以滑动端的末端进行轴运动,全景摄像头通过旋转接头连接于中央悬臂的自由端的底部,从而便可以实现全方位自由旋转并寻找最佳摄影角度。
远程VR控制室40包括:VR头盔401和控制手柄402。其中,VR头盔401与VR摄像头20A通信连接,从而实时显示数字手术室内的虚拟场景。控制手柄402与数控机器人20B通信连接,从而可以远程控制数控机器人的动作。
为了提高VR的体验效果,数控机器人的机械手臂上设有至少一个压电式传感器(图中未标示),利用压电式传感器测量机械手臂在操作手术器械时所施加的力并将测得的电信号传送至中央控制器,控制手柄上进一步设置有包括至少一个偏心轮振动器的反作用力施加装置(图中未示出),由此可以根据中央控制器的指令向控制手柄施加与机械手臂对应的反作用力,来增强远程操作人员的VR控制体验。
作为又一种非限制性实施方式,进一步包括设置于控制手柄上的至少一个陀螺仪传感器(图中未示出),利用陀螺仪传感器可以测量控制手柄在虚拟操作时的位置移动,并将测得的电信号传送至中央控制器,数控机器人的机械手臂上进一步设置移动跟踪装置(图中未示出),来根据中央控制器的指令进行与控制手柄相应的位置移动,在本发明中,移动跟踪装置包括至少一个直线运动电机以及至少一个旋转运动电机。
如图2所示,每一个数字手术室20进一步包括无影灯摄像头20I以及腹腔镜摄像头20J,每个无影灯摄像头20I及每个腹腔镜摄像头20J分别与中央控制器20D通信连接,可以将拍摄的手术过程存储于中央控制器的存储单元,每个无影灯摄像头20I及每个腹腔镜摄像头20J分别与无菌液晶显示器20G通信连接,从而便可以在手术室内利用无菌液晶显示器20G实时观测腹腔手术过程。
在该非限制性实施方式中,数字手术室20的顶壁还设有视频轨道,视频通讯装置20H通过滑杆安装于视频轨道上,滑杆内设有感应器。如图3所示,视频通讯装置20H包括:手势识别装置20H1、激光发射器20H2、以及红外传感器20H3。其中,手势识别装置与滑杆内的感应器通信连接,使得滑杆根据手势识别装置的反应手势在视频轨道上滑动以改变视频通讯装置的视频位置和视频角度。
无菌液晶显示器20G与中央控制器20D通信连接,无菌液晶显示器20G包括:查询单元及记录单元,其中,查询单元用于查找中央控制器的存储单元中患者资料;记录单元用于记录手术过程中的事项。
影音演示装置30包括多个影音演示单元,这些影音演示单元可以是设置于医院的远程会议室内,也可以通过医院局域网登录。
此外,数字总控装置10可以设置于一个或多个总控室内,为了保证手术播放的效果,数字总控装置设有多个手术转播屏以及对应的数据输入控制台,通过多个手术转播屏便可实现同时观看多个数字手术室的实时转播或同时观看一个数字手术室的多方位手术视频转播的效果。
为了保证手术过程的顺利进行,一体化手术台的两侧分别设置定位保护屏障,每个定位保护屏障设置至少三个操作窗口,来供数控机器人所操控的手术器械穿过,同时,每个操作窗口分别设置窗口活动盖板,使得仅在需要对相应区域进行操作时才开启对应的操作窗口,进一步增强了操作安全性。在该非限制性实施方式中,定位保护屏障及窗口活动盖板采用聚碳酸酯树脂镜片材料制成。
此外,一体化手术台上设有用于调节手术台高度的升降按钮、用于水平方向旋转手术台的旋转按钮以及用于调节手术台水平倾角的坡度按钮,从而可以灵活地调整手术台的角度,便于医生的操作,提高了手术的成功率。
尽管在此已详细描述本发明的优选实施方式,但要理解的是本发明并不局限于这里详细描述和示出的具体结构和步骤,在不偏离本发明的实质和范围的情况下可由本领域的技术人员实现其它的变型和变体。
- 结合VR技术的数字化手术系统
- 基于VR技术的数字化复合手术室远程会诊系统