一种利用飞轮稳定测量平台的球形机器人
文献发布时间:2023-06-19 09:52:39
技术领域
本发明设计一种球形机器人,其特点在于使用了内切外壳的全向轮作为驱动装置,以及使用了飞轮系统作为其内部测量平台的稳定装置。
技术背景
球形机器人外表封闭,将驱动机构、传感器等设备都包覆在内。因而具有极佳的封闭性,相比于普通的轮式机器人或是双(多)足机器人具有天然的优势,而且其体积小,静音效果好,机动灵活,可以零半径转向因此十分适用于两栖环境、复杂环境(风沙、腐蚀性等)的侦察工作,比如战场侦察、行星探测等。对于一般的球形机器人,通常采用多个或是摆臂驱动轮作为驱动结构,其优点在于可以利用内部驱动的方法驱动球形机器人。但是使用这种方法将导致球形机器人内部的传感器、主控等部件跟随外壳一起转动,长时间的转动、震荡将会导致传感器测量误差快速放大,这对于遥控控制来说影响不大,但是这种误差使得在球形机器人上引入控制算法以及导航方法时难以实现长时间的精确自主导航控制。
此外,用于侦察作业的球形机器人上通常会装有光学摄像头,实现实时的图像传输,但是这种摄像头通常也会跟随球形机器人一起滚动,无法获得稳定的图像质量,为了解决这个问题目前采用的办法是在球形机器人的某条直径上突出两个摄像机舱室,但是由于有突出物,球形机器人就不能实现滚转动作,降低了其灵活性。
因此我们希望稳定球形机器人的内部装载传感器的测量平台。这样做有两个好处,第一,稳定测量平台后有利于减小陀螺仪的测量误差,获得更高的测量精度,有利于引入导航制导控制。其次,在稳定的测量平台上固定光学相机,搭配透明的外壳材料,可以实现稳定的画面传输。
发明内容
本发明提供了一种利用飞轮稳定测量平台的球形机器人,可以解决目前常见的球形机器人内部传感器随球形机器人外壳一起滚动的问题。
为了实现上述目的,本发明采用了如下技术:
一种利用飞轮稳定测量平台的球形机器人,其中球形机器人的本体包括测量平台、球形外壳、飞轮、飞轮电机、全向轮、主控板以及电池组,其中三个飞轮互相垂直,四个由步进电机驱动的全向轮与球形外壳相切。
测量平台是球形车的主要结构,其外观上是一个立方体中空结构,其上固定有飞轮电机基座、主控基座、步进电机基座等。具体的,在测量平台一个面的内部固定有主控基座,另有三个面的内部固定有飞轮电机基座,基座与测量平台通过连接柱固定,连接柱的具体长度与飞轮厚度和电机轴长度有关。在测量平台外侧固定有四个步进电机基座。
飞轮利用法兰联轴器固定在飞轮电机的转轴上,位于测量平台与飞轮电机基座之间,其厚度可根据需求进行变更,但是飞轮与联轴器的总厚度不能超过电机转轴可使用的长度。飞轮电机固定在飞轮电机基座上,其转轴指向测量平台外部方向,但不超出测量平台外表面,三个平面皆如此安装。
同时,使用了四个步进电机、四个全向轮,其中全向轮通过法兰联轴器安装在步进电机轴上,步进电机安装在步进电机基座上,步进电机基座固定在球形机器人测量平台的外部四个顶点上,这四个顶点的连线可以构成一个正四面体,可以计算获得同一面上的两个全向轮之间角度约为109.47°。
通过全向轮转动时与外壳之间的摩擦可以驱动球形机器人改变姿态,通过控制多个全向轮的摩擦力产生的合力可以确定球形机器人的移动方向。在测量平台内部安装三个互相垂直的飞轮,利用飞轮的加减速产生的控制力抵消全向轮驱动外壳产生的反作用力,使得内部测量平台保持水平稳定。
本发明的有益效果:
1.一种可以稳定球形机器人内部的测量平台的方法,利用飞轮抵消全向轮驱动外壳时产生的反作用力,使得内部测量平台搭载的传感器、相机等器件不跟随外壳滚动,减小误差,提高图像质量,也不会影响球形机器人的灵活性。
2.一种用全向轮与步进电机内驱动球形机器人的新布局形式,可以通过多个全向轮的协作控制球形机器人滚动方向。
附图说明
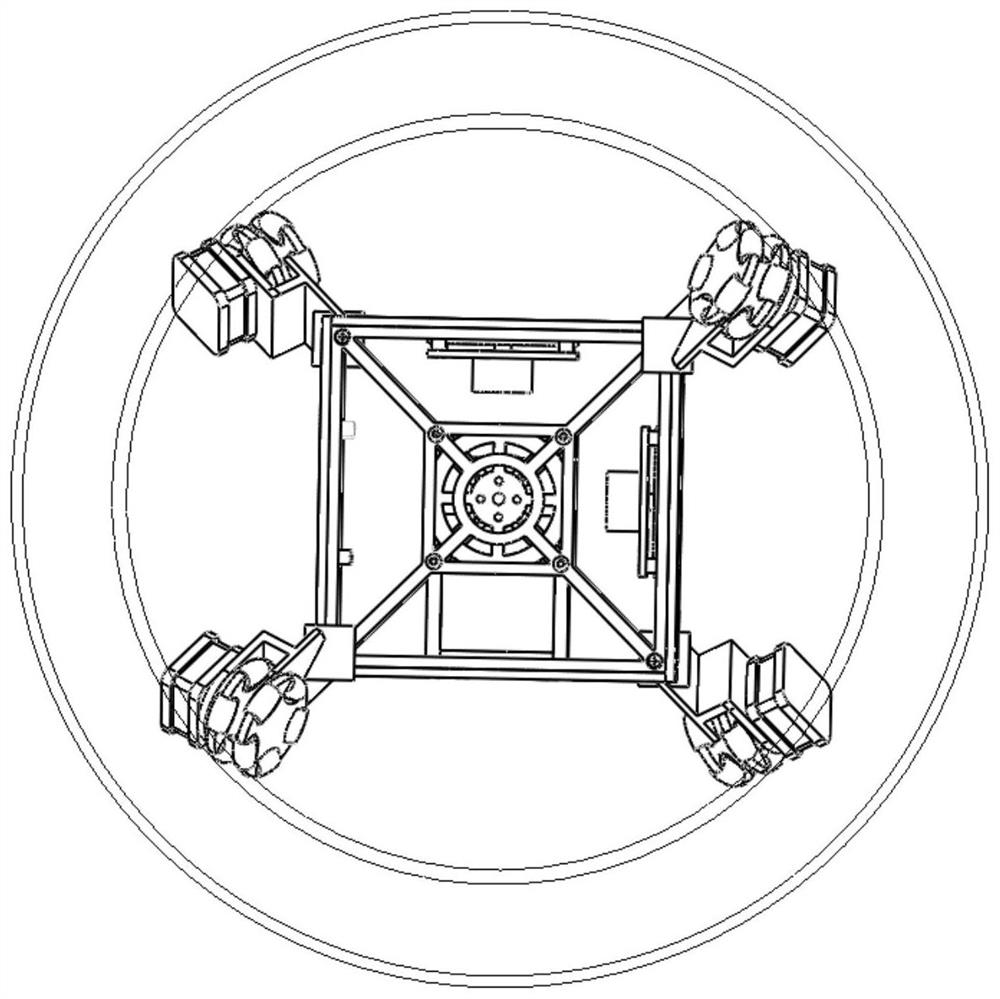
图1为本发明提出的球形机器人的整体外观展示(局部剖面图);
图2为本发明提出的球形机器人的结构示意图;
图3为本发明提出的球形机器人内部电机—飞轮驱动系统结构示意图;
图4为本发明提出的球形机器人内部步进电机—全向轮系统结构示意图;
图5为本发明提出的球形机器人内部主控及基座的结构示意图;
图中:1-球形机器人本体、2-外壳、3-测量平台、4-连接柱、5-飞轮电机基座、6-飞轮、7-飞轮电机、8-法兰联轴器、9-全向轮、10-步进电机基座、11-步进电机、12-主控基座、13-主控板、14-电池组。
具体实施方式
为了清楚说明本方案的技术特点,将结合附图,对于方案实施的具体方案进行详细阐述。
参照附图所示,可以看到主要内部结构,包括外壳2、测量平台3、飞轮6、两种型号的电机(飞轮电机7和步进电机11)、全向轮9、主控板13、电池组14等。所述球形机器人1的测量平台3、基座5(12)采用轻型材料、由3D打印获得、减轻结构质量,飞轮6使用了铝合金材料,外壳使用轻型、高硬度材料,最好为透明材质,目前考虑使用亚克力材料。
所述球形机器人1的主要内部结构被固定在测量平台3上。飞轮利用法兰联轴器8安装在飞轮电机7上,飞轮电机7被固定在飞轮电机基座5上,主控13与电池14安装在主控基座12上,主控板13位于外测量3结构的几何中心位置,飞轮电机基座5与主控机座12通过连接柱4固定在测量平台3上。
步进电机11安装在步进电机基座10上,全向轮9安装在步进电机11轴上,步进电机基座10固定在球形机器人1的测量平台3的四个顶点上,这四个顶点的连线可以构成一个四面体(四个面的面积和对应边的边长完全相等),且全向轮9径向与外壳2内表面相切。全向轮9的中心点位于步进电机基座10安装在的测量平台3的顶点与测量平台3中心点的连接线上(直线一),全向轮9径向所在平面可以称之为平面一。平面一是测量平台3的中心点与该步进电机基座10安装在测量平台3的顶点的相邻两个顶点所在边的中点的连线与直线一所确定的平面。同一面上的两个全向轮9之间角度约为109.47°。
所述球形机器人1采用步进电机11与全向轮9作为内驱动装置,通过全向轮9转动时与外壳2内表面之间的摩擦可以驱动球形机器人1改变姿态,通过控制多个全向轮9的摩擦力产生的合力可以确定球形机器人1的移动方向。但是,由于全向轮9与外壳2内表面摩擦时产生的反作用力,会导致内部的测量平台3也产生滚动,需要想办法稳定测量平台3。
因此,采用了飞轮6与飞轮电机7作为测量平台3的稳定装置,使用了三个互相垂直的飞轮6,分别置于测量平台的滚转、偏航、俯仰三个轴,主要作用是在全向轮9驱动外壳2时利用飞轮6加减速产生的控制力拒抵消反作用力,使测量平台3保持水平稳定,不会跟随转动。
在上述前提下,可对本发明进行适当的改造,以上所述只是针对本发明的其中一种优选方案,但本发明的保护范围并不局限于此。对于本发明所属技术领域的普通技术人员来说,在本发明的基础上还可以做出若干的技术推演以及推算,都应当属于本发明的保护范围。
- 一种利用飞轮稳定测量平台的球形机器人
- 具有稳定平台可弹跳的全向滚动球形机器人