一种基于动力学约束的刀具路径确定方法及系统
文献发布时间:2023-06-19 09:52:39
技术领域
本发明涉及刀具路径确定领域,特别是涉及一种基于动力学约束的刀具路 径确定方法及系统。
背景技术
高精数控加工技术在复杂工件制造中占有越来越大的比重。数控加工的主 要流程包含计算机辅助设计(Computer Aided Design,CAD)、计算机辅助制造 (ComputerAided Manufacturing,CAM)、后处理过程以及机床加工。随着数控 机床的快速发展,人们在实际数控加工对CAM的精度和效率提出了更高的要 求。而刀具路径规划在CAM中扮演了很重要的角色,因为刀具必须沿着规划 好的刀位点的轨迹行进。因此,刀位点轨迹的优劣在一定程度上决定了加工精 度和加工效率。
关于刀具路径规划的研究可以大致分为两类:基于参数形式的研究和基于 拓扑形式的研究。基于参数形式的传统路径规划方法主要有等参数法,等平面 法和等残高法。而基于拓扑形式的传统路径规划方法主要分为方向平行轨迹规 划方法,螺旋轨迹规划方法和空间填充曲线规划方法。
等参数法主要应用在参数曲面S(u,v)上。在规划路径时,保持u和v两 个参数中任一参数不变,将参数平面上的等参数线映射到欧氏空间中参数曲面 上,进而生成刀具路径。但是这种方法可能会造成局部区域加工轨迹过于密集, 残高分布不均,影响表面加工质量以及整体加工效率。等平面法利用一簇平行 平面(驱动面)与加工曲面的交线生成刀具路径。这类方法的关键是如何选择驱 动面。Quinsat等人通过最大化材料去除率来选择驱动面。Hu等人基于残高约 束和动力学约束构建标量场,之后利用标量场选择最优驱动面。通过等平面法 生成的路径很难满足残高约束,因为其加工行距保持恒定而待加工曲面会比较 复杂。而等残高方法是在给定第i条路径上的刀位点Pi,j后,利用预设的最 大残留高度,在垂直于当前进给方向的方向上,计算出下一条路径对应的刀位 点Pi+1,j。对于等残高法,初始路径的选择非常重要。好的初始路径可以有 效提升加工效率。Giri等人通过分析曲面的曲率,给出了选取初始路径的方法。 Chiou等人首先利用能量场的原理提出势场法,之后根据最大材料去除率选择 初始路径。Lee等人利用有效切割椭圆来计算加工带宽,进而生成等残高刀具 加工路径。Min等人基于相邻路径的相似性提出了一种新的等残高法,具有很 高的计算效率。
在方向平行轨迹规划方法中,所有路径与预先设定的某条直线平行。所有 轨迹首尾相连形成zigzag轨迹。这种方法由于比较简单而被广泛应用于粗加工 中。螺旋轨迹规划方法基于曲面边界轮廓构造,每条路径都是曲面边界的偏置 (offset)曲线。这类方法生成的路径连续性较好,无需频繁抬刀,切入,转接, 从而被广泛应用于型腔加工。而对于空间填充曲线规划方法,其生成的路径虽 然连续性较好,但是由于计算比较复杂,进给方向变化频繁,所以不常用。
随着近几年CAD/CAM技术的快速发展,三角网格模型在离散几何建模、 CNC数控加工编程、图形和图像等领域得到了广泛的应用。三角网格模型由 于其简单、成熟的特点,已成为计算机图形学和数控加工中常用的自由曲面表 示形式。因此,针对三角网格模型的刀具路径规划研究具有重要的现实意义。
然而,现有的基于参数形式的方法不能直接应用于三角网格模型。在三角 网格模型上,有几种不同的刀具路径规划方法。Lee利用在残高约束下的轮廓 偏置曲线生成螺旋曲线刀具路径。Zhu等人通过预设的引导线生成螺旋刀具路 径,并给出了根据残高误差寻找偏置曲线的方法。Sun等人重点研究了非零亏 格三角网格曲面的数控加工,并且提出了一种针对五轴加工的光滑刀具轨迹生 成方法。然而上述这些方法在消除自交时可能会导致生成的路径不满足残高约 束。
而以往的基于拓扑形式的方法通常只在简单的单值曲面上生成刀具轨迹。 因此,在三角网格模型表示的自由曲面上生成刀具路径的算法值得关注。
针对二维平面和三维空间网格,Zhao等人在三角网格模型上实现了一种 新的刀具路径生成方法:连通费马螺旋线(Connected Fermat Spirals,CFS)。该 方法利用热方法生成形状感知的标量场,之后把这些等值线连接成CFS。这类 刀具路径具有以下几个优点:整个刀具路径仅包含一个终点和起点,从而无须 频繁抬刀、切入;整个待加工曲面可以被CFS完全覆盖;单个费马螺旋线的 起点和终点可以在边界上任意选择,从而有利于路径的连续性。然而,Zhao 等人主要从几何角度来考虑刀具路径轨迹的生成,而不是数控加工。经过刀具 轨迹优化后,Zhao等人生成的刀具路径有太多拐点,并且在生成费马螺旋线 时没有考虑动力学约束,进而降低了加工时的进给速率。
发明内容
本发明的目的是提供一种基于动力学约束的刀具路径确定方法及系统,在 生成路径时考虑了动力学约束,从而有效提升了加工时的进给速率。
为实现上述目的,本发明提供了如下方案:
一种基于动力学约束的刀具路径确定方法,包括:
获取带有边界的三角网格曲面;
对所述带有边界的三角网格曲面进行边界的提取;每一所述边界用点序列 表示;
基于残高约束,根据进给方向对当前偏置的边界上的每一个点进行偏置, 确定当前偏置的边界的轮廓偏置曲线;
基于残高约束消除所述轮廓偏置曲线中自交的轮廓曲线;将所述当前偏置 的边界替换为下一偏置的边界,返回所述基于残高约束,根据进给方向对当前 偏置的边界上的每一个点进行偏置,确定当前偏置的边界的轮廓偏置曲线的步 骤,直至所述带有边界的三角网格曲面中所有边界偏置完成;
根据每一所述轮廓偏置曲线,基于动力学约束确定带有边界的三角网格曲 面每个子区域中的费马螺旋线;
根据所有子区域中的费马螺旋线,采用spiral-contour树确定连通的费马螺 旋线;所述spiral-contour树用于表示每个子区域间的费马螺旋线的邻接关系;
根据所述连通的费马螺旋线确定刀具路径。
可选的,所述基于残高约束,根据进给方向对当前偏置的边界上的每一个 点进行偏置,确定当前偏置的边界的轮廓偏置曲线,之前还包括:
根据残高约束计算路径间隔和路径间隔方向。
可选的,所述基于残高约束,根据进给方向对当前偏置的边界上的每一个 点进行偏置,确定当前偏置的边界的轮廓偏置曲线,具体包括:
获取所述当前偏置的边界上的第i个点的位置以及进给方向;
根据所述第i个点的位置以及进给方向确定定义平面;所述定义平面与所 述带有边界的三角网格曲面相交;
根据所述定义平面与所述带有边界的三角网格曲面相交的线段以及所述 第i个点对应的路径间隔方向,确定所述第i个点对应的偏置点;
根据所述当前偏置的边界的所有的偏置点确定所述当前偏置的边界的轮 廓偏置曲线。
可选的,所述每一所述轮廓偏置曲线,基于动力学约束确定带有边界的三 角网格曲面每个子区域中的费马螺旋线,具体包括:
获取所述轮廓偏置曲线上曲率最大的点;
将所述曲率最大的点作为转接点,并基于动力学约束将所述曲率最大的点 对应的角度进行增加,确定带有边界的三角网格曲面每个子区域中的费马螺旋 线。
可选的,所述根据所有子区域中的费马螺旋线,采用spiral-contour树确定 连通的费马螺旋线,之后还包括:
对所述连通的费马螺旋线采用高速分段插补算法进行光滑化处理。
一种基于动力学约束的刀具路径确定系统,包括:
带有边界的三角网格曲面获取模块,用于获取带有边界的三角网格曲面;
边界提取模块,用于对所述带有边界的三角网格曲面进行边界的提取;每 一所述边界用点序列表示;
轮廓偏置曲线确定模块,用于基于残高约束,根据进给方向对当前偏置的 边界上的每一个点进行偏置,确定当前偏置的边界的轮廓偏置曲线;
轮廓偏置曲线优化模块,用于基于残高约束消除所述轮廓偏置曲线中自交 的轮廓曲线;将所述当前偏置的边界替换为下一偏置的边界,返回所述基于残 高约束,根据进给方向对当前偏置的边界上的每一个点进行偏置,确定当前偏 置的边界的轮廓偏置曲线的步骤,直至所述带有边界的三角网格曲面中所有边 界偏置完成;
费马螺旋线确定模块,用于根据每一所述轮廓偏置曲线,基于动力学约束 确定带有边界的三角网格曲面每个子区域中的费马螺旋线;
连通的费马螺旋线确定模块,用于根据所有子区域中的费马螺旋线,采用spiral-contour树确定连通的费马螺旋线;所述spiral-contour树用于表示每个子 区域间的费马螺旋线的邻接关系;
刀具路径确定模块,用于根据所述连通的费马螺旋线确定刀具路径。
可选的,还包括:
路径间隔和路径间隔方向确定模块,用于根据残高约束计算路径间隔和路 径间隔方向。
可选的,所述轮廓偏置曲线确定模块具体包括:
第i个点的位置以及进给方向获取单元,用于获取所述当前偏置的边界上 的第i个点的位置以及进给方向;
定义平面确定单元,用于根据所述第i个点的位置以及进给方向确定定义 平面;所述定义平面与所述带有边界的三角网格曲面相交;
第i个点对应的偏置点确定单元,用于根据所述定义平面与所述带有边界 的三角网格曲面相交的线段以及所述第i个点对应的路径间隔方向,确定所述 第i个点对应的偏置点;
轮廓偏置曲线确定单元,用于根据所述当前偏置的边界的所有的偏置点确 定所述当前偏置的边界的轮廓偏置曲线。
可选的,所述费马螺旋线确定模块具体包括:
曲率最大的点和曲率最小的点获取单元,用于获取所述轮廓偏置曲线上曲 率最大的点;
费马螺旋线确定单元,用于将所述曲率最大的点作为转接点,并基于动力 学约束将所述曲率最大的点对应的角度进行增加,确定带有边界的三角网格曲 面每个子区域中的费马螺旋线。
可选的,还包括:
路径光滑化处理模块,用于对所述连通的费马螺旋线采用高速分段插补算 法进行光滑化处理。
根据本发明提供的具体实施例,本发明公开了以下技术效果:
本发明所提供的一种基于动力学约束的刀具路径确定方法及系统,对所述 带有边界的三角网格曲面进行边界的提取,并基于残高约束,根据进给方向对 当前偏置的边界上的每一个点进行偏置,确定当前偏置的边界的轮廓偏置曲 线,重复进行边界的轮廓偏置曲线的确定,进而实现带有边界的三角网格曲面 的空间填充,并根据每一所述轮廓偏置曲线,基于动力学约束确定带有边界的 三角网格曲面每个子区域中的费马螺旋线,进而根据所有子区域中的费马螺旋 线,采用spiral-contour树确定连通的费马螺旋线。即生成连续的连通费马螺旋 线的刀具路径,在生成路径时考虑了动力学约束,从而有效提升了加工时的进 给速率。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施 例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是 本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性 的前提下,还可以根据这些附图获得其他的附图。
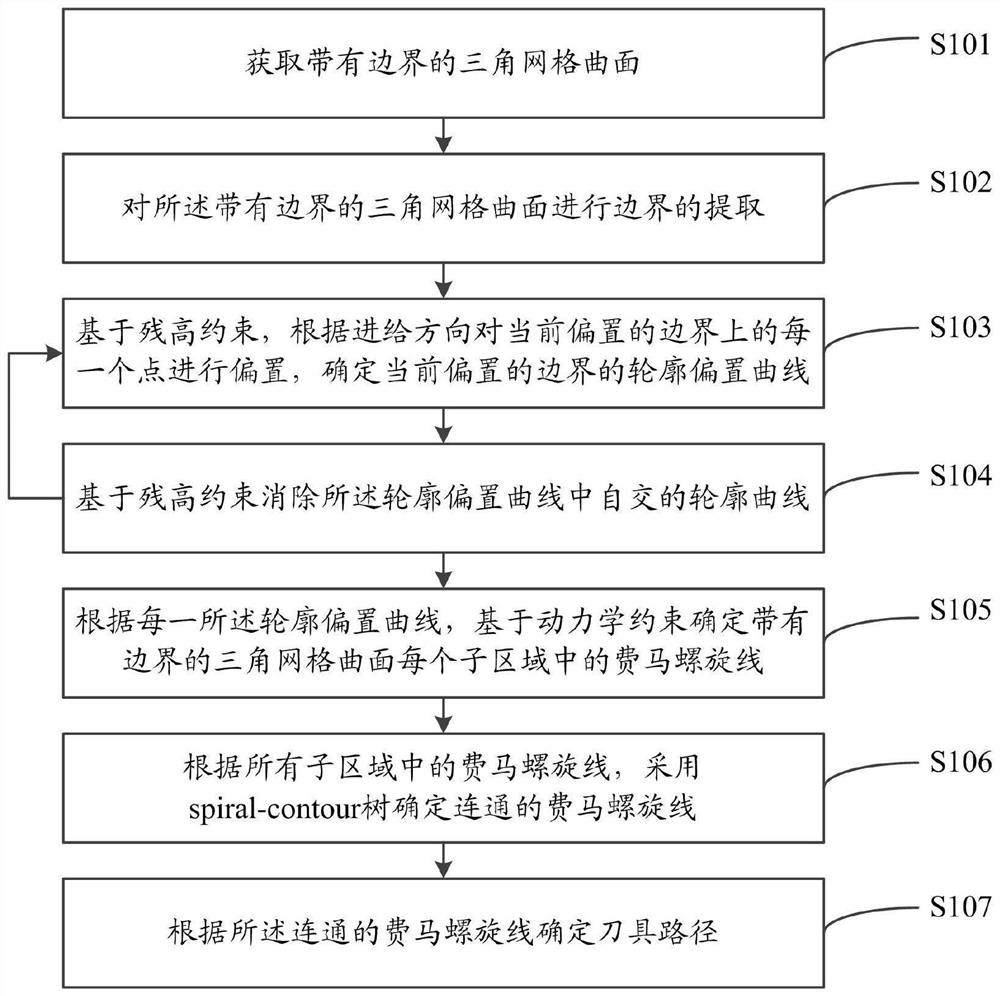
图1为本发明所提供的一种基于动力学约束的刀具路径确定方法流程示 意图;
图2为带有边界的三角网格曲面的边界与边界的轮廓偏置曲线的示意图;
图3为消除自交的轮廓曲线后的轮廓偏置曲线示意图;
图4为费马螺旋线的确定过程示意图;
图5为连通的费马螺旋线示意图;
图6为本发明所提供的一种基于动力学约束的刀具路径确定系统结构示 意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清 楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是 全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造 性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明的目的是提供一种基于动力学约束的刀具路径确定方法及系统,在 生成路径时考虑了动力学约束,从而有效提升了加工时的进给速率。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和 具体实施方式对本发明作进一步详细的说明。
图1为本发明所提供的一种基于动力学约束的刀具路径确定方法流程示 意图,如图1所示,本发明所提供的一种基于动力学约束的刀具路径确定方法, 包括:
S101,获取带有边界的三角网格曲面。
S102,对所述带有边界的三角网格曲面进行边界的提取;每一所述边界用 点序列表示。
S103,基于残高约束,根据进给方向对当前偏置的边界上的每一个点进行 偏置,确定当前偏置的边界的轮廓偏置曲线。所述当前偏置的边界的轮廓偏置 曲线为等残高的等值偏置曲线。
S103之前还包括:
根据残高约束计算路径间隔和路径间隔方向。
当刀具沿刀具路径轨迹移动时,残留高度会在加工表面上出现。路径轨迹 之间的距离就是刀触点路径间隔。路径间距的计算与曲面的凹凸性有关。使用 球头刀来加工曲面。路径间距取决于曲面的局部曲率半径R、进给方向、刀具 半径r和残留在曲面上的高度h。通常情况下被约束的最大残高h远小于刀具半 径r,因此可以简化路径间距的计算。当使用球头刀加工时,在平面上的刀具 路径间隔l
S103具体包括:
获取所述当前偏置的边界上的第i个点的位置以及进给方向。
每个点的进给方向具体的计算过程为:
假设边界上有点P
通过点P
定义平面F
根据所述第i个点的位置以及进给方向确定定义平面;所述定义平面与所 述带有边界的三角网格曲面相交。
根据所述定义平面与所述带有边界的三角网格曲面相交的线段以及所述 第i个点对应的路径间隔方向,确定所述第i个点对应的偏置点。所述偏置点 的偏置距离应等于刀具路径间隔。
根据所述当前偏置的边界的所有的偏置点确定所述当前偏置的边界的轮 廓偏置曲线。
边界的轮廓偏置曲线上一点P
沿着路径间隔方向移动到现有三角面片上的最远点。如果折线段长度P
作为一个具体的实施例,标量d表示折线段P
根据上述公式,考虑两个问题。
第一个问题是如何计算点β使得点β满足方程组,并且||β-α||最大。
第二个问题是,当点β到达顶点时,如何得到满足以下条件的三角面片f
对于第一个问题,β在三角面片f
之后遍历f
对于第二个问题,的目标是为下一轮迭代选择正确的三角面片f
根据进给方向得到偏置点后,就可以对曲面的边界进行偏置,得到轮廓偏 置曲线,并如图2所示。
S104,基于残高约束消除所述轮廓偏置曲线中自交的轮廓曲线;将所述当 前偏置的边界替换为下一偏置的边界,返回所述基于残高约束,根据进给方向 对当前偏置的边界上的每一个点进行偏置,确定当前偏置的边界的轮廓偏置曲 线的步骤,直至所述带有边界的三角网格曲面中所有边界偏置完成。
如图3所示,将点P
之后,得到点B和B
S105,根据每一所述轮廓偏置曲线,基于动力学约束确定带有边界的三角 网格曲面每个子区域中的费马螺旋线。
S105具体包括:
获取所述轮廓偏置曲线上曲率最大的点。
其中,三角网格上的法曲率和法向量计算具体包括:
计算三角网格顶点上的法向量和法曲率。顶点V
设点P在三角面片f
之后,通过三个顶点的信息和点P的位置来计算点P的法向量
将所述曲率最大的点作为转接点,并基于动力学约束将所述曲率最大的点 对应的角度进行增加,确定带有边界的三角网格曲面每个子区域中的费马螺旋 线。
将转接连接局部近似成同心圆弧连接,进而使得刀具路径中的拐点的数量 只有一半,使得的路径更加光滑。
将这两条曲线投影到与转接点法向量垂直的平面上,然后就可以测试到切 线与相邻轮廓曲线的相交点。
采用以上步骤生成一个螺旋线路径,然后将这个螺旋线连接成一个费马螺 旋线。如图4所示,以同心圆为例,在第二条轮廓曲线上选择一个转接点P
S106,根据所有子区域中的费马螺旋线,采用spiral-contour树确定连通 的费马螺旋线,如图5所示;所述spiral-contour树用于表示每个子区域间的费 马螺旋线的邻接关系。
S106之后还包括:
对所述连通的费马螺旋线采用高速分段插补算法进行光滑化处理。
S107,根据所述连通的费马螺旋线确定刀具路径。两条相邻的轮廓曲线可 以通过断开和连接,生成一条连续的路径。不断重复这一步会形成一个螺旋形 路径。而这个螺旋形路径可以转换为费马螺旋线。
图6为本发明所提供的一种基于动力学约束的刀具路径确定系统结构示 意图,如图6所示,本发明所提供的一种基于动力学约束的刀具路径确定系统, 包括:
带有边界的三角网格曲面获取模块601,用于获取带有边界的三角网格曲 面;
边界提取模块602,用于对所述带有边界的三角网格曲面进行边界的提 取;每一所述边界用点序列表示。
轮廓偏置曲线确定模块603,用于基于残高约束,根据进给方向对当前偏 置的边界上的每一个点进行偏置,确定当前偏置的边界的轮廓偏置曲线。
轮廓偏置曲线优化模块604,用于基于残高约束消除所述轮廓偏置曲线中 自交的轮廓曲线;将所述当前偏置的边界替换为下一偏置的边界,返回所述基 于残高约束,根据进给方向对当前偏置的边界上的每一个点进行偏置,确定当 前偏置的边界的轮廓偏置曲线的步骤,直至所述带有边界的三角网格曲面中所 有边界偏置完成。
费马螺旋线确定模块605,用于根据每一所述轮廓偏置曲线,基于动力学 约束确定带有边界的三角网格曲面每个子区域中的费马螺旋线。
连通的费马螺旋线确定模块606,用于根据所有子区域中的费马螺旋线, 采用spiral-contour树确定连通的费马螺旋线;所述spiral-contour树用于表示 每个子区域间的费马螺旋线的邻接关系。
刀具路径确定模块607,用于根据所述连通的费马螺旋线确定刀具路径。
本发明所提供的一种基于动力学约束的刀具路径确定系统,还包括:
路径间隔和路径间隔方向确定模块,用于根据残高约束计算路径间隔和路 径间隔方向。
所述轮廓偏置曲线确定模块具体包括:
第i个点的位置以及进给方向获取单元,用于获取所述当前偏置的边界上 的第i个点的位置以及进给方向。
定义平面确定单元,用于根据所述第i个点的位置以及进给方向确定定义 平面;所述定义平面与所述带有边界的三角网格曲面相交。
第i个点对应的偏置点确定单元,用于根据所述定义平面与所述带有边界 的三角网格曲面相交的线段以及所述第i个点对应的路径间隔方向,确定所述 第i个点对应的偏置点。
轮廓偏置曲线确定单元,用于根据所述当前偏置的边界的所有的偏置点确 定所述当前偏置的边界的轮廓偏置曲线。
所述费马螺旋线确定模块具体包括:
曲率最大的点和曲率最小的点获取单元,用于获取所述轮廓偏置曲线上曲 率最大的点。
费马螺旋线确定单元,用于将所述曲率最大的点作为转接点,并基于动力 学约束将所述曲率最大的点对应的角度进行增加,确定带有边界的三角网格曲 面每个子区域中的费马螺旋线。
本发明所提供的一种基于动力学约束的刀具路径确定系统,还包括:
路径光滑化处理模块,用于对所述连通的费马螺旋线采用高速分段插补算 法进行光滑化处理。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是 与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于 实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较 简单,相关之处参见方法部分说明即可。
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施 例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的 一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变 之处。综上所述,本说明书内容不应理解为对本发明的限制。
- 一种基于动力学约束的刀具路径确定方法及系统
- 一种基于动力学约束的刀具路径确定方法及系统