一种带非线性的广义时滞马尔科夫跳变系统的控制方法
文献发布时间:2023-06-19 10:02:03
技术领域
本发明属于马尔科夫系统控制领域,具体涉及一种带非线性的广义时滞马尔科夫跳变系统的控制方法。
背景技术
在实际工程应用中,例如:工程技术、交通运输、电路系统、生物系统、经济系统等,在运行过程中环境的突变、系统内部部分元件损坏、子系统之间关联改变以及人为干预等随机突变因素的影响,都会引起系统结构和参数跳变,这类具有随机特性的系统通常被称之为混合系统。马尔科夫跳变系统是混杂系统的一个重要分支之一,对其可以考虑为在不同时间段内按照不同的运行规律运作,会由于某些突发的情况导致运行规律发生变化,而关于切换的时间点则由马尔科夫链决定。通过对同一现象的不断统计,可以得出从一个子系统变换到另一个子系统的概率。若是能够获得这些数据,就可以用马尔科夫跳变模型来对该系统进行描述。而相对于普通马尔科夫跳变系统模型,而广义马尔科夫跳变系统模型不仅含有动态方程,还含有静态方程,由此广义马尔科夫跳变系统可以更准确地表示出实际系统的结构特性。
同时对控制系统的设计来说获得必要的系统状态信息是一个重要的内容,近年来大部分关于广义时滞马尔科夫跳变系统的滑模控制研究都是基于状态可得情况下直接对系统进行控制研究如文献(Li F,Du C,Yang C,et al.Passivity-based asynchronoussliding mode control for delayed singular Markovian jump systems[J].IEEETransactions on Automatic Control,2017,63(8):2715-2721.)和文献(Li M,Liu M,Zhang Y.Asynchronous adaptive dynamic output feedback sliding mode controlfor singular markovian jump systems with actuator faults and uncertaintransition rates[J].Applied Mathematics and Computation,2020,371:124958.),但由于实际系统中经常能遇见状态不可直接获得的情况,故有必要对广义时滞马尔科夫跳变系统的滑模控制研究考虑基于观测器来设计控制器,而少部分的文献如(Feng Z,ShiP.Sliding mode control of singular stochastic Markov jump systems[J].IEEETransactions on Automatic Control,2017,62(8):4266-4273.)虽然也对广义马尔科夫跳变系统的滑模控制研究考虑设计了观测器,但其观测器增益和控制器增益都是分别获得的有其局限性,而本发明中的方法是可以同时获得观测器增益和控制器增益的更有优越性。
发明内容
本发明的目的在于提供一种带非线性的广义时滞马尔科夫跳变系统的控制方法,通过观测器与滑模控制相结合的方式,可以有效的在状态不可直接获得的情况下对系统产生良好的控制。
实现本发明目的的技术解决方案为:一种带非线性的广义时滞马尔科夫跳变系统的控制方法,包括如下步骤:
步骤(1):构建带非线性的广义时滞马尔科夫跳变系统的系统模型;
步骤(2):构建带非线性的广义时滞马尔科夫跳变系统的观测器模型,基于观测器模型和步骤(1)的系统模型得到误差系统模型;
步骤(3):利用积分滑模面,根据滑模控制理论考虑到达滑模面时的等效控制器,构造滑动模态下的等价观测器模型;
步骤(4):将步骤(3)得到的等价观测器模型与步骤(2)中误差系统模型构成增广系统,针对增广系统,给出系统容许并满足存在扰动下时H
步骤(5):利用Lyapunov函数和性能指标函数证明步骤(4)的条件有效;
步骤(6):在步骤(4)的条件基础上推导出系统的状态反馈增益矩阵K
步骤(7):利用Lyapunov函数证明步骤(3)中滑模控制律下的观测器滑模面有限时间可达性。
进一步的,所述步骤(1)中构建的带非线性的广义时滞马尔科夫跳变系统的系统模型为:
y(t)=C(r
其中x(t)∈R
马尔科夫过程的转移概率矩阵如下:
同时g(t,r
|g(t,r
在这之中的F(r
进一步的,步骤(2)中得到的观测器模型为:
其中
接着误差定义为:
y
其中:
A
进一步的,步骤(3)采用积分滑模面的积分型切换函数如下:
式中,矩阵G
根据滑模控制的理论,当第i个子系统轨道到达滑模面的时候,存在s
再考虑到
那么可以得到第i个子系统的等效控制器u
将其代入到原观测器中可得如下形式的等价观测器模型:
进一步的,步骤(4)中定义一个增广状态:
其中
同时基于之前对于非线性项的定义可以得到
这之中的
对于这个增广系统给出如下约束条件:在存在标量γ>0和如下矩阵P
这个增广系统是是随机容许的同时当
其中:
进一步的,所述步骤(5)利用Lyapunov函数和性能指标函数证明步骤(4)中的条件有效,具体过程为:
(a)构造如下依赖于时滞和马尔可夫跳变系统模态参数的Lyapunov-Krasovskii泛函:
V(x
其中:
通过证明在步骤(4)的条件下该Lyapunov函数正定,Lyapunov函数的无穷小算子负定,从而根据李雅谱诺夫稳定性理论证明系统在能达到稳定状态;
(b)接着又通过验证
其中的矩阵G,N,M满足如下条件:
ENG
(c)又考虑如下性能指标函数:
也证明在步骤(4)的条件下增广系统也能满足该性能指标函数;那么结合上述条件说明了步骤(4)的条件的有效性。
进一步的,按照步骤(4)中的条件通过变量替换的方式求得满足条件的系统的状态反馈增益矩阵K
对步骤(4)的部分条件做等价变换如下:
采取左乘
再通过一定的不等式缩放,并考虑
这个增广系统是是随机容许的同时当
其中:
Γ
当上式满足时我们可以得到控制器增益K
对矩阵中的非线性项进行处理,再使用matlab通过给定的矩阵和参数计算出K
进一步的,步骤(7)给出一个能确保观测器到达步骤(3)中所设计的滑模面的滑模控制律,利用Lyapunov函数证明有限时间可达性,具体为:
设计的滑模控制律如下:
其中:
考虑如下的Lyapounov函数:
对其求无穷小算子:
由于λ>0可知在有限时间内观测器状态会到达滑模面。
本发明与现有技术相比,其显著优点在于:
本发明基于实际系统中经常能遇见状态不可直接获得的情况,通过状态观测器与滑模控制相结合的方式对状态不可直接获得的带非线性的广义时滞马尔科夫跳变系统进行控制,通过本发明能同时设计获得观测器增益和控制器增益,并且在状态不可直接获得的情况下对系统产生良好的控制效果。
附图说明
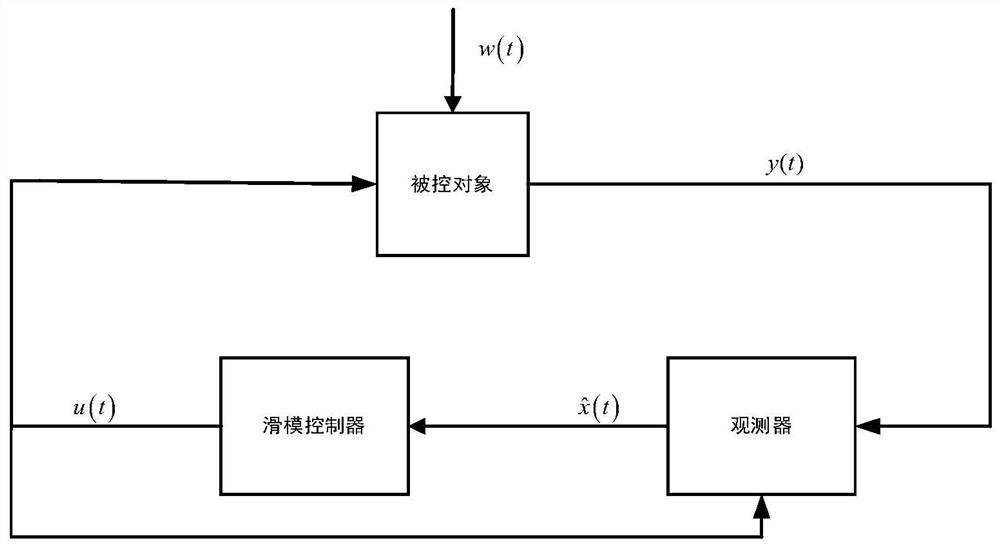
图1为本发明的基于观测器下的滑模控制的结构框图。
图2是广义马尔科夫系统模态跳变图。
图3是在设计的滑模控制下的误差仿真图。
图4是在设计的滑模控制下观测器状态仿真图。
图5是在设计的滑模控制下原系统状态仿真图。
具体实施方式
下面结合附图对本发明作进一步详细描述。
如图1所示,本发明是带非线性的时滞广义马尔科夫跳变系统在基于观测器下的滑模控制方法。具体操作步骤如下:
步骤1:建立带非线性的广义时滞马尔科夫跳变系统模型
y(t)=C(r
仿真中,考虑该系统的马尔科夫跳变模态为2,马尔科夫过程的转移概率为
系统其余参数分别为:
F
F
步骤2:根据步骤1设计观测器模型为:
其中
接着误差定义为:
y
其中:
A
步骤3:采用积分滑模面的积分型切换函数如下:
其中:
矩阵K
G
根据滑模控制的理论,当第i个子系统轨道到达滑模面的时候,存在s
再考虑到
那么可以得到第i个子系统的等效控制器u
将其代入到步骤2原观测器中可得如下形式的等价观测器模型:
步骤4:定义一个增广状态:
其中
同时基于之前对于非线性项的定义可以得到
这之中的
步骤5:针对步骤4中的增广系统给出如下约束条件:存在标量γ=0.5和如下矩阵
这个增广系统是是随机容许的同时当
其中:
Γ
步骤6:结合步骤5中给出的条件并考虑到控制器增益K
再运用matlab进行仿真求得控制器增益与观测器增益如下:
K
步骤:7:建立滑模控制器的数学模型
其中:
最后,将滑模控制器代入到原系统中,可得系统仿真结果。对仿真结果作出总结,在系统的模态变化如图2的情况下,在得到的控制器和观测器作用下,如图3所示,观测误差在一定时间内到达零,说明观测器状态与原系统状态很快就到达同步。图4所示观测器状态能够到达稳定状态,图5则说明在控制器作用下原系统也到达了稳定状态,从而说明了本发明所提出的方法的有效性。
- 一种带非线性的广义时滞马尔科夫跳变系统的控制方法
- 一种广义时滞马尔科夫跳变系统的复合抗干扰控制方法