一种直升机用吊挂装置及方法
文献发布时间:2023-06-19 10:03:37
技术领域
本发明属于直升机外吊挂领域,涉及一种直升机用吊挂装置及方法。
背景技术
直升机在执行货物吊挂运输任务时,由于吊挂物重量较大,飞行高度较高,且飞行距离较远,要求对货物必须百分百可靠吊挂,否则将对地面人员及财产安全造成及其严重的威胁。因此,吊挂装置必须安全、可靠。此外,由于直升机执行吊挂任务需满足及时性,对于无法实现空中投放的货物,吊挂至目的地后,须第一时间完成挂钩打开,尤其在作战任务中,直升机必须立即撤出战区,否则将成为敌人的活靶子。
目前,直升机用货物吊挂类设备,其锁死性能并非完全可靠,在飞机开车状态下,甚至飞机必须落地,地勤人员快速接近飞机取下货物后,飞机才能离开,效率低下,对飞行员、飞机和地勤人员安全有很大影响。
发明内容
本发明的目的在于克服上述现有技术的缺点,提供一种直升机用吊挂装置及方法,实现快速投放货物,很好的保护相关人员、财产和直升机安全,快捷方便,可靠性、安全性高。
为达到上述目的,本发明采用以下技术方案予以实现:
一种直升机用吊挂装置,包括挂钩、压杆和摇杆;
挂钩第一端铰接固定设置;压杆第一端设置有第一压块,压杆中间部位铰接固定设置;摇杆第一端铰接固定设置,摇杆第二端设置有第二压块,摇杆中部下方设置有支撑点;
当装置吊挂锁紧时,挂钩第二端与第一压块接触,挂钩第二端给第一压块远离挂钩方向的力,压杆第二端与第二压块接触,摇杆与支撑点接触,压杆第二端对第二压块施加的压力作用线位于摇杆铰接位置下方。
优选的,第一压块和第二压块均采用滚轮。
优选的,摇杆中间部位铰接有连杆第一端,连杆第二端铰接有曲柄第一端,曲柄第二端铰接固定设置。
优选的,摇杆第一端连接有电机。
进一步,挂钩上设置有称重传感器。
优选的,挂钩第一端的铰接点靠近挂钩第一端设置,挂钩第一端远离挂钩第二端的一侧设置有接近传感器。
一种基于上述任意一项所述装置的直升机用吊挂方法,当进行货物吊挂时,货物吊挂在挂钩上,挂钩第二端与第一压块接触,货物重力通过挂钩传递给压杆,挂钩第二端给第一压块远离挂钩方向的力,压杆第二端朝向摇杆第二端转动,压杆第二端与第二压块接触,压杆第二端对第二压块施加的压力作用线位于摇杆下方,使摇杆与支撑点接触;
当投放货物时,摇杆绕摇杆第一端向上转动,第二压块与压杆第二端脱离,压杆在挂钩压力的作用下转动,第一压块与挂钩第二端脱离,挂钩绕挂钩第一端转动,货物从挂钩中脱离。
优选的,货物触地时,当挂钩上的称重传感器测量得到的重量小于门限值,电机转动,带动摇杆绕摇杆第一端向上转动,使货物从挂钩中脱离。
与现有技术相比,本发明具有以下有益效果:
本发明所述装置通过杠杆原理,挂钩对压杆施加压力,压杆始终压向第二压块,产生负角度,使摇杆始终贴合支撑点,利用负角度锁死原理实现可靠锁死,比常规依靠摩擦力锁死更加可靠、安全,并且在需要投放货物时,仅需要将摇杆向上抬起,使第二压块与压杆第二端脱离,不需要地勤人员协助,便能够实现货物自动脱离,安全系数高。
进一步,第一压块和第二压块均采用滚轮,在脱离时,减少脱离的摩擦阻力,避免卡顿,从而实现快速脱离投放。
进一步,通过控制电机转动,便能够实现装置分离投放,方便快捷,不需要地勤人员协助,仅通过驾驶员便能够操作。
进一步,能够通过称重传感器检测的重量信息,驾驶员进行投放,保证货物安全和可靠投放,并且能够通过门限值实现自动投放,实现快速、自动投放货物。
进一步,通过接近传感器检测挂钩第一端与其的距离,从而获取挂钩打开和闭合状态,方便驾驶员判断挂钩开合状态,确保飞机的安全,提高了货物吊挂、运输效率。
本发明所述方法能够快速吊挂装载,运输过程可靠吊挂,并且在需要投放时,仅需要将摇杆向上抬起,使第二压块与压杆第二端脱离,不需要地勤人员协助,便能够实现货物自动脱离,安全系数高。
进一步,货物触地时,通过门限值对实际重量进行比对,能够自动控制电机带动摇杆绕摇杆第一端向上转动,使货物从挂钩中脱离。无需飞行员操纵货物投放,无需地勤人员取下货物,无需飞机落地,实现快速、自动投放货物。
附图说明
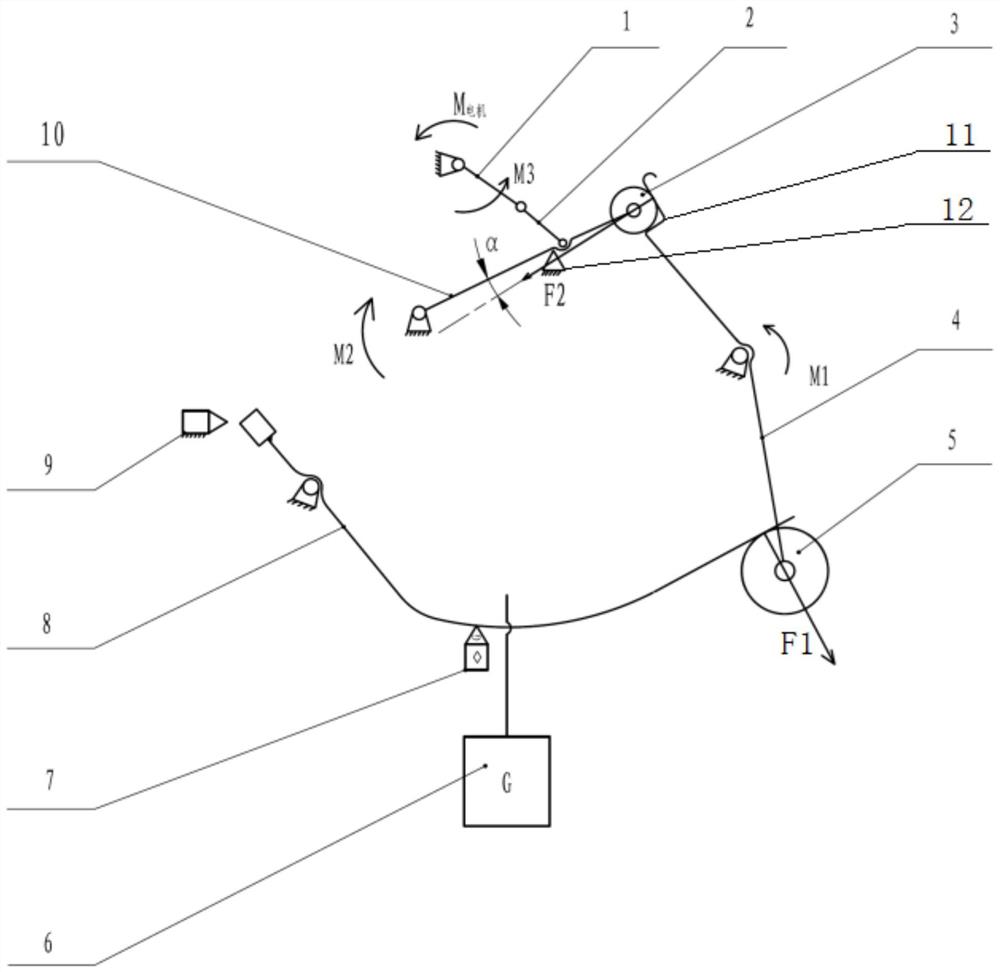
图1为本发明的货物吊挂结构示意图;
图2为本发明的货物投放结构示意图。
其中:1-曲柄;2-连杆;3-第二压块;4-压杆;5-第一压块;6-货物;7-称重传感器;8-挂钩;9-接近传感器;10-摇杆;11-锁死面;12-支撑点。
具体实施方式
下面结合附图对本发明做进一步详细描述:
如图1所示,为本发明所述的直升机用吊挂装置,包括挂钩8、压杆4和摇杆10。
挂钩8共有两端,挂钩8第一端铰接固定设置,压杆4位于挂钩8第二端侧方;压杆4共有两端,压杆4第一端设置有第一压块5,压杆4中间部位铰接固定设置,挂钩8第二端底部与压块顶部朝向挂钩8第一端一侧接触;摇杆10共有两端,摇杆10位于挂钩8正上方,摇杆10第一端铰接固定设置,摇杆10第二端设置有第二压块3,摇杆10中间部位正下方设置有支撑点12;摇杆10中间部位铰接有连杆2第一端,连杆2第二端铰接有曲柄1第一端,曲柄1第二端铰接固定设置。
当装置吊挂锁紧时,挂钩8第二端与第一压块5压紧接触,接触点为第一压块5顶部朝向挂钩8第一端位置,挂钩8第二端给第一压块5远离挂钩8方向的力,压杆4第二端与第二压块3压紧接触,摇杆10与支撑点12接触,压杆4第二端对第二压块3施加的压力作用线位于摇杆10铰接位置下方。
第一压块5和第二压块3均采用滚轮。从而在脱离时,减少脱离的摩擦阻力,避免卡顿,从而实现快速脱离投放。
压杆4第二端设置有L型的锁死面11。
曲柄1第二端连接有电机,通过控制电机转动,便能够实现装置分离投放,方便快捷,不需要地勤人员协助,仅通过驾驶员便能够操作。
挂钩8上设置有称重传感器7,能够通过称重传感器7检测的重量信息,驾驶员进行投放,保证货物6安全和可靠投放,并且在货物6触地时,能够通过门限值实现快速、自动投放货物6。
挂钩8第一端的铰接点靠近挂钩8第一端设置,挂钩8第一端原理挂钩8第二端的一侧设置有接近传感器9,通过接近传感器9检测挂钩8第一端与其距离,从而获取挂钩8打开和闭合状态,方便驾驶员进行判断,确保飞行及吊挂运输安全,提高了货物6吊挂和运输效率。
如图1所示,当吊挂装置进行货物6运输时,货物6吊挂在挂钩8上,货物6重力通过挂钩8传递给压杆4,压杆4受挂钩8压力F1,产生逆时针转矩M1,使压杆4产生逆时针旋转趋势。压杆4第二端的锁死面11将M1传递至摇杆10第二端的第二压块3滚轮上,对第二压块3产生斜向下压力F2;因F2作用线与摇杆10连心线存在负向夹角α,所以力F2对摇杆10杆会产生顺时针转矩M2,转矩M2使摇杆10产生顺时针旋转趋势。摇杆10落在支撑点12上,支撑点12对摇杆10起支撑和限位作用,支撑点12的作用力产生的转矩与M2平衡,使锁闭机构处于平衡状态。
因此,货物6吊挂状态下,摇杆10始终受压,机构始终可以保持可靠锁死,根据受力分析可知,吊挂载荷越大,摇杆10受压力越大,锁闭结构锁死越可靠。
如图1所示,当需要投放货物6时,曲柄1带动连杆2转动,在临界状态时,根据力矩平衡原理,锁死面11受M2作用,连杆2需施加大小相同、方向相反的逆时针力矩,进一步可知曲柄1带动连杆2转动的力矩M3,即可知伺服电机的最小启动力矩为M3。根据杠杆原理,货物6重力经各级杠杆传递后,伺服电机启动力矩将远远小于货物6重力产生的力矩。
如图2所示,当投放货物6时,伺服电机以大于M3的启动力矩M
为实现货物6触地自动投放,将挂钩8本体设计成具备称重功能的应变式传感器,输出的称重信号经比较、放大处理后传输给飞行控制系统,实时显示吊挂重量值,包括因冲击或加速度引起的重量变化值。
当飞机吊挂货物6飞行至目的地后,飞机降低高低,货物6触地,挂钩8上的重量瞬间减小,当重量小于预先设定的门限值后,重量信号触发飞行控制系统继电器,系统自动启动伺服电机,从而打开挂钩8,快速完成货物6触地自动投放任务。
如图2所示,当机构复位时,向上扳动挂钩8,压杆4受挂钩8向上的分力作用而顺时针旋转,挂钩8第二端滑过压杆4的第一压块5滚轮,进入锁死面11锁死区域,压杆4受挂钩8向上的分力作用而顺时针旋转,当压杆4第二端顶部斜面掠过摇杆10的第二压块3滚轮后,第二压块3滚轮落回到锁死面11内,同时连杆2和曲柄1也完成复位动作。之后在挂钩8重力作用下,挂钩8第二端压在压杆4的第一压块5滚轮上,整个机构完成复位。
为实现吊挂装置挂钩8打开、关闭状态的实时监测,应用基于霍效应的非接触式接近传感器9,将状态信号实时传输给飞行控制系统,实现快速、准确的位置状态监测。接近传感器9的感应探头固定安装在装置外壳上,磁性标靶安装在挂钩8上并随挂钩8转动。
以上内容仅为说明本发明的技术思想,不能以此限定本发明的保护范围,凡是按照本发明提出的技术思想,在技术方案基础上所做的任何改动,均落入本发明权利要求书的保护范围之内。
- 一种无人直升机货物外吊挂投放监控装置及方法
- 一种无人直升机货物外吊挂投放监控装置及方法