一种工作台设备及工作台垂向清零误差的测量方法
文献发布时间:2023-06-19 10:06:57
技术领域
本发明涉及半导体制造技术领域,尤其涉及一种工作台设备及工作台垂向清零误差的测量方法。
背景技术
在半导体设备运行过程中,往往需要通过若干个传感器的执行器在线测量和校准设备自身的随机误差,以提高半导体设备的工作定位精度。
例如,对于工作台设备,工作台携带硅片或玻璃基板在水平方向或竖直方向进行移动,从而实现对工作台上的硅片或玻璃基板进行处理或运送,干涉仪系统能够对工作台的位置进行测量。干涉仪系统中的垂向干涉仪用于确定工作台的垂向零位,从而将工作台移动至垂向零位,但是垂向干涉仪将工作台进行位置归零的过程中,存在清零误差,即工作台每次反射垂向零位的实际位置略有不同。垂向零位的清零误差导致工作台初始化失败,使得工作台后续垂向移动精度较低。
所以需要另外设置垂向测量的传感器计算垂向清零误差。一般情况下,垂向测量的传感器位于投影物镜下方,可实现垂向误差的测量。但是投影物镜下方若安装有浸没头时,浸没头占据了垂向测量的空间,若要实现对整个工作台实现垂向误差的测量,则一套干涉仪系统可能无法覆盖工作台的全行程,需要布置两套干涉仪系统,使得设备成本高。
发明内容
本发明实施例提供了一种工作台设备及工作台垂向清零误差的测量方法,以解决进行垂向清零误差的测量时,一套干涉仪系统无法覆盖工作台的全行程的问题。
第一方面,本发明实施例提供了一种工作台设备,包括:投影物镜、主基板、工作台、控制器和垂向测量系统;所述垂向测量系统包括至少两个垂向测量器;
所述工作台位于所述主基板的一侧;所述投影物镜固定于所述主基板,用于将所述投影物镜输出的光线投射至所述工作台;所述工作台可在平行于所述主基板的方向上和垂直于所述主基板的方向上移动;
每个所述垂向测量器包括对应设置的光线发射器和光线接收器,设置于所述主基板靠近所述工作台的一侧;在垂直于所述主基板的平面内,对应设置的所述光线发射器和光线接收器均设置于所述投影物镜的浸没头的同一侧;所述光线接收器用于接收对应光线发射器发射的,并经所述工作台上第一测量点或第二测量点反射的测量光线,以使所述垂向测量器获取所述第一测量点和第二测量点的垂向高度;所述控制器用于根据所述第一测量点垂向高度和第二测量点的垂向高度获取所述工作台在垂向位置清零后的垂向清零误差。
可选的,所述垂向测量系统包括两个垂向测量器:第一垂向测量器和第二垂向测量器;所述第一垂向测量器包括对应设置的第一光线发射器和第一光线接收器;在垂直于所述主基板的第一平面内,第一光线发射器和第一光线接收器均设置于所述投影物镜的浸没头的一侧;所述第二垂向测量器包括对应设置的第二光线发射器和第二光线接收器;在垂直于所述主基板的第二平面内,所述第二光线发射器和所述第二光线接收器均设置于所述投影物镜的浸没头的一侧;所述第一垂向测量器用于获取所述第一测量点的垂向高度,所述第二垂向测量器用于获取所述第二测量点的垂向高度。
可选的,所述第一平面和所述第二平面重合;所述第一垂向测量器和所述第二垂向测量器分别设置于所述投影物镜的浸没头的相对两侧。
可选的,所述工作台设备还包括:工作台测量框架,横向位置测量系统和垂向位置测量系统;所述工作台测量框架设置于所述主基板靠近所述工作台的一侧;所述横向位置测量系统设置于所述工作台测量框架上,用于发送平行于所述主基板的横向光线至所述工作台,以获取所述工作台在平行于所述主基板所在平面的横向位置;所述垂向位置测量系统设置于所述主基板靠近所述工作台的一侧,用于发送垂直于所述主基板的方向上的垂向光线至所述工作台,以获取所述工作台在垂直于所述主基板的方向上的垂向位置。
可选的,所述工作台上设置有至少两个凸起的基准板;所述第一测量点和所述第二测量点分别位于不同的基准板上。
第二方面,本发明实施例还提供了一种工作台垂向清零误差的测量方法,适用于本发明任意实施例提供的工作台设备,包括:
从工作台靠近所述主基板的一侧选取第一测量点和第二测量点;
移动所述工作台,控制所述第一测量点位于与所述第一测量点对应的垂向测量器的光线发射器的焦平面上;并获取所述第一测量点的垂向高度;
移动所述工作台,控制所述第二测量点位于与所述第二测量点对应的垂向测量器的光线发射器的焦平面上,并获取所述第二测量点的垂向高度;
根据所述第一测量点和所述第二测量点的垂向高度,获取所述工作台在垂向位置清零后的垂向清零误差。
可选的,所述垂向测量系统包括两个垂向测量器:第一垂向测量器和第二垂向测量器;在垂直于所述主基板的第一平面内,所述第一垂向测量器和所述第二垂向测量器分别设置于所述投影物镜的浸没头的相对两侧;所述工作台上设置有至少两个凸起的基准板;所述第一测量点和所述第二测量点分别位于不同的基准板上;所述第一垂向测量器用于获取所述第一测量点的垂向高度,所述第二垂向测量器用于获取所述第二测量点的垂向高度;移动所述工作台,控制所述第一测量点位于与所述第一测量点对应的垂向测量器的光线发射器的焦平面上;并获取所述第一测量点的垂向高度;移动所述工作台,控制所述第二测量点位于与所述第二测量点对应的垂向测量器的光线发射器的焦平面上,并获取所述第二测量点的垂向高度,包括:移动所述工作台,使得所述第一测量点位于所述第一垂向测量器的测量光线的测量范围内;控制所述第一测量点位于所述第一垂向测量器的光线发射器的焦平面上,并获取所述第一测量点的垂向高度;移动所述工作台,使得所述第二测量点位于所述第二垂向测量器的测量光线的测量范围内;控制所述第二测量点位于所述第二垂向测量器的光线发射器的焦平面上,并获取所述第二测量点的垂向高度。
可选的,所述工作台设备还包括工作台测量框架、横向位置测量系统和垂向位置测量系统;所述工作台测量框架设置于所述主基板靠近所述工作台的一侧;从工作台靠近所述主基板的一侧选取第一测量点和第二测量点之后,还包括:按照如下公式获取第一垂向测量器和第二垂向测量器的测量光线在平行于所述主基板的方向上的横向测量范围,所述横向测量范围包括工作台坐标系中的工作台的横向坐标s
其中,x_f为所述第一测量点或第二测量点在所处基准板坐标系中的横向坐标;Mw
按照如下公式获取第一垂向测量器和第二垂向测量器的测量光线在垂直于所述主基板的方向上的垂向测量范围,所述垂向范围包括工作台坐标系中的工作台垂向坐标(Rx
其中,
可选的,根据所述第一测量点和所述第二测量点的垂向高度,获取所述工作台在垂向位置清零后的垂向清零误差,包括:通过所述至少一个横向位置测量系统获取工作台坐标系中所述第一测量点横向坐标(x_s
其中,fh_ref
可选的,根据所述第一测量点和所述第二测量点的垂向高度,获取所述工作台在垂向位置清零后的垂向清零误差之后,还包括:控制所述工作台沿x方向移动,通过第一垂向测量器或第二垂向测量器获取所述工件台沿y方向的垂向旋转量的校正残差;并根据所述校正残差获取所述第一垂向测量器和所述第二垂向测量器之间的垂向高度差值。
本发明中,工作台位于主基板的一侧,可在平行于主基板和垂直于主基板的方向上移动,投影物镜固定于主基板,能够将光线投射至工作台。垂向测量系统包括至少两个垂向测量器,每个垂向测量器包括对应设置的光线发射器和光线接收器,光线接收器用于接收对应光线发射器发射的,并经所述工作台上第一测量点或第二测量点反射的测量光线,不同的垂向测量器分别测量第一测量点和第二测量点的垂向高度,从而使得控制器根据第一测量点和第二测量点的垂向高度计算获取工作台的垂向清零误差。在每个垂向测量器中,对应设置的光线发射器和光线接收器均设置于投影物镜的浸没头的同一侧,则光线发射器和对应光线接收器之间不会存在浸没头阻挡测量光线的传输,多个垂向测量器分别测量整个工作台的垂向高度,则在垂向清零误差的测量过程中,降低了工作台的行程范围,使得一套干涉仪系统即可覆盖工作台全行程,而不需要设置多台套干涉仪系统,节省了工作台设备的成本,并避免了多个干涉仪系统切换引入的测量误差,提高了干涉仪系统的位置测量精度。
附图说明
图1是现有技术中工作台设备的结构示意图;
图2是现有技术中另一种工作台设备的结构示意图;
图3是本发明实施例提供的一种工作台设备的结构示意图;
图4是本发明实施例提供的另一种工作台设备的结构示意图;
图5是本发明实施例提供的一种工作台设备的俯视图;
图6是本发明实施例提供的另一种工作台设备的俯视图;
图7是本发明实施例提供的又一种工作台设备的俯视图;
图8是本发明实施例提供的一种工作台垂向清零误差的测量方法的流程示意图;
图9是本发明实施例步骤S102提供的工作台的结构示意图;
图10是本发明实施例步骤S103提供的工作台的结构示意图。
具体实施方式
下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
参考图1,图1是现有技术中工作台设备的结构示意图,在通过主基板14上设置的垂向测量器11对工作台13进行垂向清零误差的测量时,垂向测量器11一般设置于投影物镜12靠近工作台13一侧的边缘,具体的,垂向测量器11的光线发射器111和光线接收器112分别设置于投影物镜12的两侧,从而规避工作台13的全行程过大的问题,减小整个工作台设备的尺寸。干涉仪系统15用于对工作台13在行程过程中的位置坐标进行测量,图1设置一套干涉仪系统15即可覆盖工作台13的行程,从而根据干涉仪系统获取工作台13的坐标位置。在进行垂向清零误差的测量时,需要选取工作台13上的两个测量点分别进行垂向高度的测量,图1中示出了测量点位于工作台13相对的两端的情况,图1分别示出了在两个测量点测量工作台垂向高度的状态示意图1a和1b,工作台13的整个行程L位于工作台设备的中心区域,降低了工作台的行程范围。
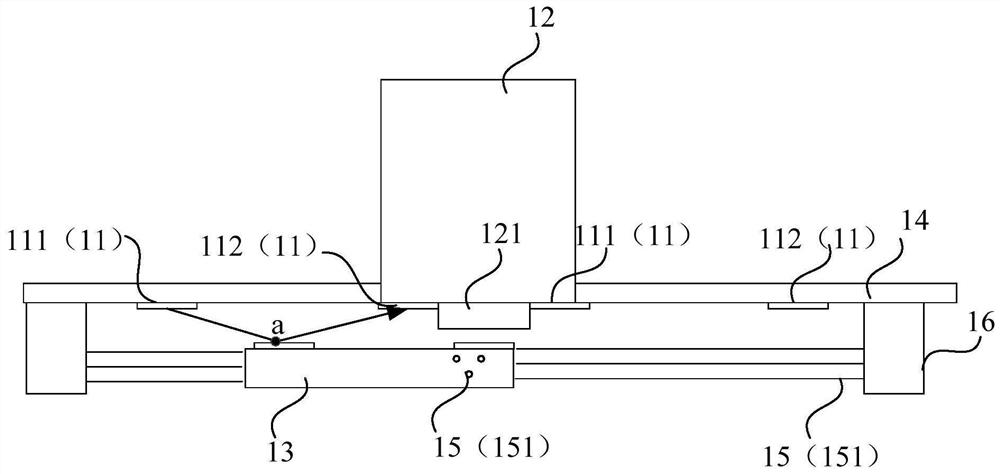
但是图1中示出了投影物镜12未设置浸没头的情况,对于存在浸没头的投影物镜12,参考图2,图2是现有技术中另一种工作台设备的结构示意图,投影物镜12的浸没头121占用了一定的垂向空间,为了避免浸没头121对垂向测量器11的测量光线的遮挡,垂向测量器11的光线发射器111和光线接收器112均设置于投影物镜12的一侧,如图2所示。图2中示出了测量点位于工作台1313相对的两端的情况,并且图2分别示出了在两个测量点测量工作台垂向高度的状态示意图2a和2b,工作台13的整个行程L偏离工作台设备的中心区域,参考图2,一套干涉仪系统15则无法覆盖整个行程,需要设置至少两套干涉仪系统15以获取工作台13在形成中的坐标位置。多套干涉仪系统15则会存在干涉仪切换工作的情况,引入较大测量误差,并且增加了设备成本。
为解决上述问题,本发明实施例提供了一种工作台设备,包括:投影物镜、主基板、工作台、控制器和垂向测量系统;垂向测量系统包括至少两个垂向测量器;
工作台位于主基板的一侧;投影物镜固定于主基板,用于将投影物镜输出的光线投射至工作台;工作台可在平行于主基板的方向上和垂直于主基板的方向上移动;
每个垂向测量器包括对应设置的光线发射器和光线接收器,设置于主基板靠近工作台的一侧;在垂直于主基板的平面内,对应设置的光线发射器和光线接收器均设置于投影物镜的浸没头的同一侧;光线接收器用于接收对应光线发射器发射的,并经工作台上第一测量点或第二测量点反射的测量光线,以使垂向测量器获取第一测量点和第二测量点的垂向高度;控制器用于根据第一测量点垂向高度和第二测量点的垂向高度获取工作台在垂向位置清零后的垂向清零误差。
本发明实施例中,工作台位于主基板的一侧,可在平行于主基板和垂直于主基板的方向上移动,投影物镜固定于主基板,能够将光线投射至工作台。垂向测量系统包括至少两个垂向测量器,每个垂向测量器包括对应设置的光线发射器和光线接收器,光线接收器用于接收对应光线发射器发射的,并经所述工作台上第一测量点或第二测量点反射的测量光线,不同的垂向测量器分别测量第一测量点和第二测量点的垂向高度,从而使得控制器根据第一测量点和第二测量点的垂向高度计算获取工作台的垂向清零误差。在每个垂向测量器中,对应设置的光线发射器和光线接收器均设置于投影物镜的浸没头的同一侧,则光线发射器和对应光线接收器之间不会存在浸没头阻挡测量光线的传输,多个垂向测量器分别测量整个工作台的垂向高度,则在垂向清零误差的测量过程中,降低了工作台的行程范围,使得一套干涉仪系统即可覆盖工作台全行程,而不需要设置多台套干涉仪系统,节省了工作台设备的成本,并避免了多个干涉仪系统切换引入的测量误差,提高了干涉仪系统的位置测量精度。
以上是本发明的核心思想,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下,所获得的所有其他实施例,都属于本发明保护的范围。
图3是本发明实施例提供的一种工作台设备的结构示意图,图4是本发明实施例提供的另一种工作台设备的结构示意图,如图3和图4所示,本实施例中,工作台设备包括投影物镜12、主基板14、工作台13、控制器(图3和图4中未示出)和垂向测量系统,垂向测量系统包括至少两个垂向测量器11,工作台13设置于主基板14的一侧,投影物镜12固定于主基板14,可向工作台13输出光线,工作台13可在平行于主基板14的方向上和垂直主基板14的方向上移动。垂向测量器11包括对应设置的光线发射器111和光线接收器112,光线发射器111用于发出测量光线,测量光线发射至工作台13上的测量点,经由测量点反射至光线接收器112,使得垂向测量器11根据上述测量光线获取工作台13与垂向测量器11之间的垂向距离,即工作台13与垂向测量器11之间的垂向高度。本实施例通过不同的垂向测量器11获取工作台13上两个不同的测量点,即第一测量点a和第二测量点b的垂向高度,并根据第一测量点a和第二测量点b的垂向高度获取整个工作台13在回归至垂向零位后的垂向清零误差,从而对工作台13的垂向位置进行校正。值得注意的是,垂向测量器11的个数可以为多个,本实施例在多个垂向测量器11中选择两个垂向测量器11,用于分别对第一测量点和第二测量点的垂向高度进行获取。垂向测量器11的个数的增加,使得工作台不需要过多移动即可通过不同的垂向测量器11获取测量点的垂向高度,进一步减小工作台13的行程范围,降低主基板14的设置尺寸。此外,工作台上设置有对应浸没头121的浸没液,工作台13的行程范围的减小,能够避免浸没头121超出浸液范围,不需要为浸没头121单独增加浸液承载盘,进一步降低设备的复杂度。
第一测量点和第二测量点的位置优选为工作台13上相互距离较远的两个测量点,可增强垂向清零误差检测的准确性。如图3和图4所示,第一测量点a可以为靠近工作台13的第一边缘的测量点,第二测量点b可以为远离第一边缘的第二边缘的测量点。可选的,参考图5,图5是本发明实施例提供的一种工作台设备的俯视图,工作台13上可设置有至少两个凸起的基准板131;第一测量点a和第二测量点b分别位于不同的基准板131上。基准板131更有利于对垂向测量器11发射的测量光线进行反射,增强光线接收器的接收效率,从而提高最终垂向清零误差的测量精度。示例性的,第一测量点位于工作台13的IS基准板,第二测量点位于工作台的PMS基准板。可选的,上述基准板131可以为用来测量投影物镜成像质量的传感器,例如RA1传感器和RA2传感器用于测量投影物镜的低阶畸变,IS传感器用来测量高阶波像差,PMS传感器用来测量投影物镜偏振。
本实施例中,垂向测量系统包括至少两个垂向测量器11,如图3和图4所示,图3和图4中均示出了垂向测量系统包括两个垂向测量器11的不同测量状态的结构示意图。垂向测量器11设置于主基板14上,且在垂直于主基板14的平面上,示例性的,在图3或图4所示的平面内,对应设置的光线发射器111和光线接收器112均设置于投影物镜12的浸没头121的一侧,如图6所示,图6是本发明实施例提供的另一种工作台设备的俯视图,每个垂向测量器11中对应的光线发射器111和光线接收器112之间未设置有阻挡测试光线的浸没头121,且在垂直于工作台13的平面内,每个垂向测量器11中对应的光线发射器111和光线接收器112设置于投影物镜12的浸没头121的一侧,图6为图3中的工作台设备的俯视图,包括两个垂向测量器11,垂向测量器11分别位于投影物镜12的不同侧。
图7是本发明实施例提供的又一种工作台设备的俯视图,可选的,继续参考图3、图4及图7,垂向测量系统包括两个垂向测量器11:第一垂向测量器11a和第二垂向测量器11b;第一垂向测量器11a包括对应设置的第一光线发射器111a和第一光线接收器112a;在垂直于主基板的第一平面P2内,第一光线发射器111a和第一光线接收器112a均设置于投影物镜12的浸没头121的一侧;第二垂向测量器11b包括对应设置的第二光线发射器111b和第二光线接收器112b;在垂直于主基板的第二平面p3内,第二光线发射器111b和第二光线接收器112b均设置于投影物镜12的浸没头121的一侧;第一垂向测量器11a用于获取第一测量点的垂向高度,第二垂向测量器11b用于获取第二测量点的垂向高度。
图6中示出了第一垂向测量器11a和第二垂向测量器11b在平面P1上,间隔投影物镜12的浸没头121相对设置的情况,图7中则示出了第一垂向测量器11a和第二垂向测量器11b分别位于不同的垂直于主基板的平面上的情况,相对于图6所示的工作台设备,图7所示的工作台设备所需的工作台行程范围减小,更有利于干涉仪系统对整个工作台形成进行覆盖,以降低主基板的设置尺寸。可选的,第一平面P2和第二平面P3可以重合;第一垂向测量器11a和第二垂向测量器11b分别设置于投影物镜12的浸没头121的相对两侧。参考图6,图6即为第一平面P2和第二平面P3重合的情况,第一平面P2和第二平面P3重合形成平面P1,使得工作台13在进行垂向高度检测过程中,工作台13沿一个方向移动,降低其他方向的扰动位置信号对测量过程产生影响,提高垂向清零误差的测量精度。
继续参考图3和图4,可获知在垂向清零误差的测量过程中,工作台13的行程靠近所述主基板14的中心位置,则可仅设置一套干涉仪系统15,并且主基板14可不需设置较大尺寸,从而降低工作台设备的整体尺寸,并且不需要为浸没头121设置形影的浸液承载盘以防止浸液流失,降低了设备的复杂程度。
可选的,继续参考图3和图4,工作台设备还包括:工作台测量框架16,横向位置测量系统151和垂向位置测量系统(图3和图4中未示出);工作台测量框架16设置于主基板14靠近工作台13的一侧;横向位置测量系统151设置于工作台测量框架16上,用于发送平行于主基板14的横向光线至工作台13,以获取工作台13在平行于主基板14所在平面的横向位置;垂向位置测量系统设置于主基板14靠近工作台13的一侧,用于发送垂直于主基板14的方向上的垂向光线至工作台13,以获取工作台13在垂直于主基板14的方向上的垂向位置。
干涉仪系统15可以包括横向位置测量系统151和垂向位置测量系统,用于分别测量工作台13的横向坐标位置和垂向坐标位置,从而便于获取第一测量点和第二测量点的坐标位置,以对工作台13的垂向清零误差进行计算。继续参考图3和图4,横向位置测量系统151设置于工作台测量框架16上,用于发送平行于主基板14的横向光线至工作台13,从而获取工作台13在平行于主基板14所在平面的横向坐标位置,具体的,参考图5,横向位置测量系统151可获取工作台13在工作台坐标系WSCS中的横向坐标位置,示例性的,工作台13在工作台坐标系WSCS中的坐标位置s
基于同一构思,本发明实施例还提供一种工作台垂向清零误差的测量方法,适用于本发明任意实施例提供的工作台设备,图8是本发明实施例提供的一种工作台垂向清零误差的测量方法的流程示意图,如图8所示,本实施例的方法包括如下步骤:
步骤S101、从工作台靠近主基板的一侧选取第一测量点和第二测量点。
继续参考图3至图5,可以从工作台13靠近主基板14的一侧选取第一测量点a和第二测量点b,并测量第一测量点a和第二测量点b的垂向高度。
步骤S102、移动工作台,控制第一测量点位于与第一测量点对应的垂向测量器的光线发射器的焦平面上;并获取第一测量点的垂向高度。
每个垂向测量器均具有一个固定的焦平面,当将垂向测量器对应的测量点移动至对应垂向测量器的焦平面时,测量光线反射强度高,测量垂向高度的精度较高。参考图9,图9是本发明实施例步骤S102提供的工作台的结构示意图,移动工作台13,控制第一测量点a位于与第一测量点a对应的垂向测量器的光线发射器的焦平面上,测量第一测量点的垂向高度。在工作台13移动过程中,工作台13可能无法时刻保持与主基板14平行,在同一状态时,工作台13不同位置处的垂向高度可能不同,如图9所示,第一测量点a位于基准板IS上,第二测量点位于基准板PMS上,第一测量点a和第二测量点在图9所示的位置的垂向高度不同,所以第一测量点a和第二测量点在各自对应的垂向测量器的光线发射器的焦平面上时,工作台13的坐标位置是不同的。
步骤S103、移动工作台,控制第二测量点位于与第二测量点对应的垂向测量器的光线发射器的焦平面上,并获取第二测量点的垂向高度。
参考图10,图10是本发明实施例步骤S103提供的工作台的结构示意图,移动工作台13,控制第二测量点b位于与第二测量点b对应的垂向测量器的光线发射器的焦平面上,测量第二测量点的垂向高度。
步骤S104、根据第一测量点和第二测量点的垂向高度,获取工作台在垂向位置清零后的垂向清零误差。
本发明实施例中,工作台位于主基板的一侧,可在平行于主基板和垂直于主基板的方向上移动,投影物镜固定于主基板,能够将光线投射至工作台。垂向测量系统包括至少两个垂向测量器,每个垂向测量器包括对应设置的光线发射器和光线接收器,光线接收器用于接收对应光线发射器发射的,并经所述工作台上第一测量点或第二测量点反射的测量光线,不同的垂向测量器分别测量第一测量点和第二测量点的垂向高度,从而使得控制器根据第一测量点和第二测量点的垂向高度计算获取工作台的垂向清零误差。在每个垂向测量器中,对应设置的光线发射器和光线接收器均设置于投影物镜的浸没头的同一侧,则光线发射器和对应光线接收器之间不会存在浸没头阻挡测量光线的传输,多个垂向测量器分别测量整个工作台的垂向高度,则在垂向清零误差的测量过程中,降低了工作台的行程范围,使得一套干涉仪系统即可覆盖工作台全行程,而不需要设置多台套干涉仪系统,节省了工作台设备的成本,并避免了多个干涉仪系统切换引入的测量误差,提高了干涉仪系统的位置测量精度。
可选的,继续参考图3至图5,垂向测量系统可以包括两个垂向测量器11:第一垂向测量器和第二垂向测量器;在垂直于主基板14的第一平面P1内,第一垂向测量器和第二垂向测量器分别设置于投影物镜12的浸没头121的相对两侧;工作台13上设置有至少两个凸起的基准板131;第一测量点a和第二测量点b分别位于不同的基准板131上;第一垂向测量器用于获取第一测量点a的垂向高度,第二垂向测量器用于获取第二测量点b的垂向高度;
上述步骤S102和步骤S103中,移动工作台13,控制第一测量点a位于与第一测量点a对应的垂向测量器的光线发射器的焦平面上;并获取第一测量点a的垂向高度;移动工作台13,控制第二测量点b位于与第二测量点b对应的垂向测量器的光线发射器的焦平面上,并获取第二测量点b的垂向高度,包括:移动工作台13,使得第一测量点a位于第一垂向测量器的测量光线的测量范围内;控制第一测量点a位于第一垂向测量器的光线发射器的焦平面上,并获取第一测量点a的垂向高度;移动工作台13,使得第二测量点b位于第二垂向测量器的测量光线的测量范围内;控制第二测量点b位于第二垂向测量器的光线发射器的焦平面上,并获取第二测量点b的垂向高度。
在将第一测量点a调至第一垂向测量器的光线发射器的焦平面上,对第一测量点a的垂向高度进行测量之前,可首先移动工作台13,使得第一测量点a位于第一垂向测量器的测量光线的测量范围内,便于快速锁定移动工作台13需要移动的大概范围,加快第一测量点a的位置调节,从而加快对第一测量点a的垂向高度的测量。同理,也可以在将第二测量点b调整至第二垂向测量器的光线发射器的焦平面上之前,获取第二垂向测量器的测量光线的测量范围,加快对第二测量点b的垂向高度的测量,从而加快整个垂向清零误差的测量进程。
可选的,继续参考图3和图4,工作台设备还包括工作台测量框架16、横向位置测量系统和垂向位置测量系统;工作台测量框架16设置于主基板14靠近工作台13的一侧;
从工作台13靠近主基板14的一侧选取第一测量点a和第二测量点b之后,即上述步骤S101之后,还包括:按照如下公式(1)获取第一垂向测量器和第二垂向测量器的测量光线在平行于主基板的方向上的横向测量范围,横向测量范围包括工作台坐标系WSCS中的工作台的横向坐标s
其中,继续参考图5和图6,x_f为第一测量点a或第二测量点b在所处基准板坐标系WTCS中的横向坐标;Mw
按照如下公式获取第一垂向测量器和第二垂向测量器的测量光线在垂直于主基板的方向上的垂向测量范围,垂向范围包括工作台坐标系WSCS中的工作台垂向坐标(Rx
其中,
在工作台垂向清零误差测量过程中,分别建立了三个相互关联的坐标系,包括基准板坐标系WTCS,工作台坐标系WSCS和工作台零位坐标系WZCS。在设定第一测量点a和第二测量点b之后,需要将第一测量点a移动至第一垂向测量器的测量光线的测量范围内,则需要通过上述三个坐标系获取第一垂向测量器的测量光线在工作台坐标系WSCS中的测量范围,同理,还需要获取第二垂向测量器的测量光线在工作台坐标系WSCS中的测量范围。上述测量范围包括横向测量范围以及垂向测量范围。
本实施例通过公式(1)能够获取第一垂向测量器或第二垂向测量器的横向测量范围。横向测量范围包括工作台坐标系WSCS中的工作台13的横向坐标s
本实施例通过公式(2)能够获取第一垂向测量器或第二垂向测量器的测量光线在垂直于主基板的方向上的垂向测量范围。垂向范围包括工作台坐标系WSCS中的工作台垂向坐标(Rx
值得注意的是,公式(2)中的(Rx
可选的,继续参考图5和图6,根据第一测量点和第二测量点的垂向高度,获取工作台在垂向位置清零后的垂向清零误差,包括:通过至少一个横向位置测量系统151获取工作台坐标系WSCS中第一测量点横向坐标(x_s
其中,fh_ref
可选的,继续参考图5,工作台垂向清零误差的测量方法,根据所述第一测量点和所述第二测量点的垂向高度,获取所述工作台在垂向位置清零后的垂向清零误差之后,还可以包括:控制工作台13沿x方向移动,通过第一垂向测量器或第二垂向测量器获取工件台13沿y方向的垂向旋转量的校正残差;并根据校正残差获取第一垂向测量器和第二垂向测量器之间的垂向高度差值。
本实施例中,在根据两个垂向测量器进行工作台调平建模,得到工作台垂向清零误差之后,可对垂向清零误差的残差进行校正,因为两个垂向测量器可能存在垂向高度差异,而垂向测量器的垂向高度差异是导致垂向清零误差的校正残差的原因,则可通过上述校正残差获取两个垂向测量器的垂向高度差异。具体的,可控制工作台13沿x方向移动,并通过两个垂向测量器中的一个垂向测量器记录工作台沿X方向扫描的Z向偏差值,从而计算工作台沿y方向的垂向旋转量的校正残差,从而根据校正残差获取两个垂向测量器的垂向高度差值,从而便于对第一垂向测量器和第二垂向测量器的垂向高度进行调整,使得第一垂向测量器和第二垂向测量器的垂向高度保持一致,增强垂向清零误差的测量的准确性。
注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
- 一种工作台设备及工作台垂向清零误差的测量方法
- 一种工作台设备及工作台垂向清零误差的测量方法