水生生物原位信息采集装置
文献发布时间:2023-06-19 10:08:35
技术领域
本发明涉及生物采集技术领域,具体涉及一种水生生物原位信息采集装置。
背景技术
生物监测是用于研究水体污染的一种重要手段,而对于生物监测而言,研究人员则主要是对生物个体、种群或者群落的信息进行采集,但是现有技术中缺乏能够对水生生物进行原位信息采集的装置。
发明内容
为了弥补现有技术的不足,本发明提供了一种水生生物原位信息采集装置。
本发明的技术方案为:
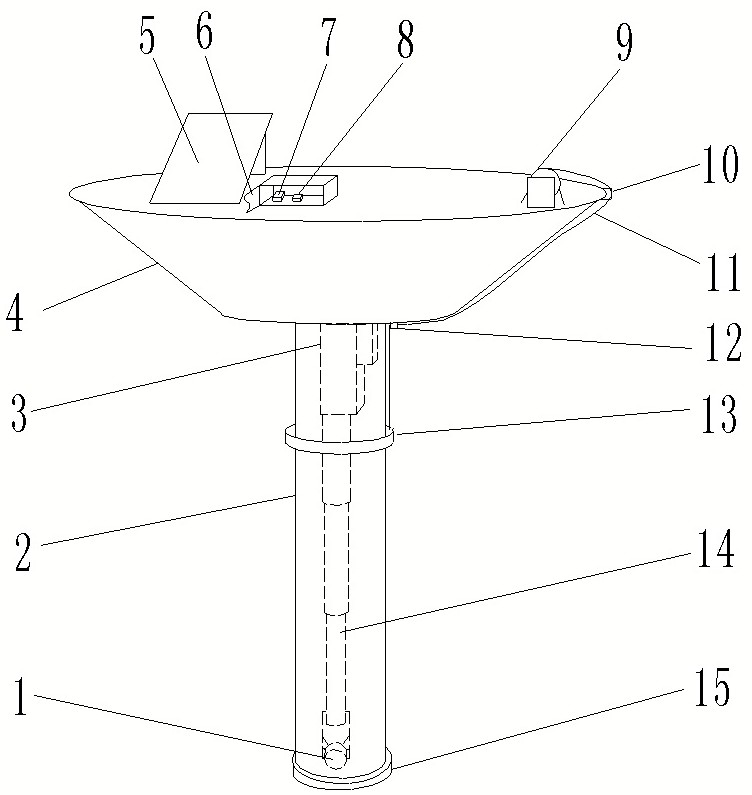
一种水生生物原位信息采集装置,包括浮标,所述浮标上固定设有动力装置、蓄电装置和控制器,所述动力装置通过支撑架固定在浮标上,所述动力装置固定连接卷线装置,所述卷线装置上缠绕有拉线,所述拉线的另一端固定连接杂物清除装置;所述浮标的下端固定连接有透明套筒,所述透明套筒内固定设有伸缩装置,所述伸缩装置的伸缩杆端部固定设有图像采集装置,所述杂物清除装置套设在透明套筒外;
所述蓄电装置通过导线分别与控制器、动力装置、伸缩装置以及图像采集装置电连接;
所述浮标上还固定设有启动停止单元,所述启动停止单元与蓄电装置电连接,所述启动停止单元与控制器的输入端信号连接,所述伸缩装置、动力装置以及图像采集装置均与控制器双向电连接;所述控制器通过以太网与4G模块双向通信连接,所述4G模块通过HTTP协议与PC端双向通信连接。
本申请中,工作人员可通过操控启动单元来控制伸缩装置和动力装置进行工作,具体来说,工作人员操控启动单元后,启动单元会向控制器发送启动信号,控制器接收到启动信号会控制伸缩装置和动力装置进行工作,伸缩装置的伸缩杆端部在控制器的控制下会按照控制器预设的程序,先间歇性地向下伸长,即伸缩装置的伸缩杆端部每隔一定时间向下伸长一定长度,然后间歇性地向上缩短,即伸缩装置的伸缩杆端部每隔一定时间向上缩短一定长度,如此不断往复;而与伸缩装置伸缩杆端部固定连接的图像采集装置则可将采集到的水生生物图像信息反馈给控制器,控制器通过以太网将视频、图片数据信息传输给4G模块,4G模块通过HTTP协议将数据信息传输到PC端;而动力装置进行工作时,动力装置在控制器的控制下能够按照控制器预设的程序进行正转一定圈数而后再反转一定圈数,当动力装置正向转动时,就会带动与其连接的卷线装置将缠绕在卷线装置上的拉线进行放线,由于杂物清除装置自身具有重力,当卷线装置上的拉线进行放线,杂物清除装置会在自身重力的作用下向下移动对透明套筒外侧壁上的附着物进行杂物清除工作,当动力装置反向转动时,动力装置会带动卷线装置进行卷线,此时,杂物清除装置则会在拉线的作用下沿透明套筒向上移动,如此杂物清除装置不断往复运动以对透明套筒的外侧壁进行杂物清除工作;此外,由于本申请中控制器通过以太网与4G模块双向通信连接,4G模块通过HTTP协议与PC端双向通信连接,而伸缩装置、动力装置以及图像采集装置均与控制器双向电连接;因此,该上述设置又可便于检测人员通过PC端来控制伸缩装置、动力装置以及图像采集装置进行动作,具体来说,就是检测人员通过PC端可对某一个装置(比如伸缩装置、动力装置和图像采集装置)来设置参数,PC端将相应的数据通过HTTP协议传输给4G模块,4G模块通过以太网传输给控制器,控制器控制相应的电器元件进行工作。
优选地,所述启动停止单元包括固定设置在浮标上的手动启动开关和手动停止开关,所述手动启动开关、手动停止开关与控制器的输入端电连接。该上述设置可便于检测人员通过手动启动或者停止本申请对水生生物进行检测的过程。
优选地,所述启动停止单元包括固定在浮标上的信号接收器,所述信号接收器与控制器的输入端电连接,所述信号接收器通过无线信号连接信号发射器,所述信号发射器与信号接收器相适配,所述信号发射器固定在遥控器上,所述遥控器上固定设有启动按键和停止按键。该上述设置可便于检测人员通过遥控器进行启动或者停止本申请对水生生物进行检测的过程。
优选地,所述杂物清除装置包括金属重力环,所述金属重力环的内侧面上固定设有刷毛。该上述设置中,金属重力环内侧面上的刷毛在金属重力环移动过程中可对附着在透明套筒上的附着物进行有效清除。
优选地,所述金属重力环内侧面上纵向开设有至少两个凹槽,所述凹槽高度一致,所述凹槽位于刷毛之间,所述凹槽内固定设有滑轮。该上述设置,可便于金属重力环的上下移动,而且,由于滑轮位于刷毛之间,因此,滑轮的设置也不会妨碍刷毛对透明套筒上的附着物进行有效清除。
优选地,所述图像采集装置为360度摄像头,所述360度摄像头与控制器双向电连接。该上述设置可便于检测人员通过PC端终端控制360度摄像头的旋转角度以对某一部分水体进行图像采集。
优选地,所述蓄电装置包括固定在浮标上的太阳能板和蓄电池,所述太阳能板和蓄电池电连接,所述蓄电池通过导线分别与控制器、动力装置、伸缩装置以及图像采集装置电连接。
优选地,所述卷线装置包括转轴、导线滚轮、轴承座、固定座,所述动力装置的输出轴固定连接转轴,所述转轴固定连接有两个轴承座和一个导线滚轮,所述导线滚轮位于两个轴承座之间,两所述轴承座分别通过固定座固定安装在浮标的上端面上。该上述设置可便于卷线装置对拉线进行放线或者缠绕,以便于杂物清除装置沿透明筒体向下移动或者向上移动。
优选地,所述动力装置为电机;所述蓄电池与电机电连接为电机提供电能;所述电机的输出轴固定连接卷线装置的转轴。
优选地,本申请还包括导线装置Ⅰ和导线装置Ⅱ,所述导线装置Ⅰ固定在浮标的侧面上端,所述导线装置Ⅱ固定设置在浮标的下端靠近透明套筒的位置处。
优选地,所述导线装置Ⅰ和导线装置Ⅱ结构相同,所述导线装置Ⅰ包括导线滚轮,所述导线滚轮固定连接有转轴,所述转轴的两端分别固定连接轴承,两轴承分别固定安装在两个安装板上,两所述安装板均固定安装在浮标上。
优选地,所述伸缩装置为电动推杆,所述电动推杆与蓄电池电连接,所述电动推杆与控制器双向电连接。该上述设置可便于检测人员通过PC端控制电动推杆的伸缩长度以便于对某一高度的水体中水生生物进行图像采集。
优选地,所述透明套筒的下端还固定设有配重环。该上述设置可有效防止透明套筒在水流的作用下发生抖动的问题。
优选地,所述蓄电池通过导线分别与控制器、电机、电动推杆以及360度摄像头电连接。
与现有技术相比,本发明的有益效果如下:
本申请能够便于对水生生物进行原位信息采集不会破坏生态环境。本申请中工作人员可通过操控启动单元来控制伸缩装置和动力装置进行工作,具体来说,工作人员操控启动单元后,启动单元会向控制器发送启动信号,控制器接收到启动信号会控制伸缩装置和动力装置进行工作,伸缩装置的伸缩杆端部在控制器的控制作用下会按照控制器预设的程序,先间歇性地向下伸长,即伸缩装置的伸缩杆端部每隔一定时间向下伸长一定长度,然后间歇性地向上缩短,即伸缩装置的伸缩杆端部每隔一定时间向上缩短一定长度,如此不断往复;而与伸缩装置伸缩杆端部固定连接的图像采集装置则可将采集到的水生生物图像信息反馈给控制器,控制器通过以太网将视频、图片数据信息传输给4G模块,4G模块通过HTTP协议将数据信息传输到PC端;而动力装置进行工作时,动力装置能够在控制器的控制下按照控制器预设的程序先正转一定圈数而后再反转一定圈数,当动力装置正向转动时,就会带动与其连接的卷线装置将缠绕在卷线装置上的拉线进行放线,由于杂物清除装置自身具有重力,当卷线装置上的拉线进行放线,杂物清除装置会在自身重力的作用下向下移动对透明套筒外侧壁上的附着物进行杂物清除工作,当动力装置反向转动时,动力装置会带动卷线装置进行卷线,此时,杂物清除装置则会在拉线的作用下沿透明套筒向上移动,如此杂物清除装置不断往复运动以对透明套筒的外侧壁进行杂物清除工作。
附图说明
图1为本申请的结构示意图;
图2为本申请中电机与卷线装置的连接关系右剖视图结构示意图;
图3为杂物清除装置的主剖视图结构示意图;
图4为本申请中导线装置Ⅰ的右剖视图结构示意图;
图5为导线装置Ⅰ中导线滚轮与导线装置Ⅱ中导线滚轮导拉线的示意图。
图中,1、360度摄像头,2、透明套筒,3、电动推杆,4、浮球,5、太阳能板,6、电控箱,7、蓄电池,8、控制器,9、卷线滚轮,10、导线装置Ⅰ,11、拉线,12、导线装置Ⅱ,13、杂物清除装置,14、伸缩杆,15、配重环,16、支撑架,17、电机,18、轴承座,19、固定座,20、金属重力环,21、刷毛,22、安装槽,23、滚轮,24、安装板,25、轴承。
具体实施方式
实施例一:
如图1至图5所示,一种水生生物原位信息采集装置,包括浮标,浮标上固定设有动力装置、蓄电装置和控制器;动力装置为电机,蓄电装置包括固定在浮标上的太阳能板和蓄电池,太阳能板和蓄电池电连接,控制器为可编程控制器;
电机通过支撑架固定在浮标上,电机固定连接卷线装置,卷线装置包括转轴、导线滚轮、轴承座、固定座,电机的输出轴固定连接转轴,转轴固定连接有两个轴承座和一个导线滚轮,导线滚轮位于两个轴承座之间,两轴承座分别通过固定座固定安装在浮标的上端面上,卷线装置的导线滚轮上缠绕有拉线,拉线的另一端固定连接杂物清除装置,杂物清除装置包括金属重力环,金属重力环套设在透明套筒外,金属重力环的上端面与拉线的上述另一端固定连接,金属重力环的内侧面上固定设有用于将透明套筒外侧壁上的附着物进行清除的刷毛,金属重力环内侧面上还纵向开设有四个凹槽,四个凹槽高度一致,且均匀分布在金属重力环的内侧面上,该四个凹槽均位于刷毛之间,该四个凹槽内固定设有滑轮;
浮标的下端还固定连接有透明套筒,透明套筒的下端还固定设有配重环,透明套筒内固定设有伸缩装置,伸缩装置为电动推杆,电动推杆的伸缩杆端部固定设有图像采集装置,图像采集装置为360度摄像头,360度摄像头与控制器双向电连接,控制器通过以太网与4G模块双向通信连接,4G模块通过HTTP协议与PC端双向通信连接。
浮标上还固定设有启动停止单元,本实施例一中启动停止单元包括固定设置在浮标上的手动启动开关和手动停止开关,手动启动开关、手动停止开关均与控制器的输入端信号连接,电动推杆、电机均与控制器双向电连接;
另外,本申请还包括导线装置Ⅰ和导线装置Ⅱ,导线装置Ⅰ固定在浮标的侧面上端,导线装置Ⅱ固定设置在浮标的下端靠近透明套筒的位置处;而导线装置Ⅰ和导线装置Ⅱ结构相同,导线装置Ⅰ包括导线滚轮,导线滚轮固定连接有转轴,转轴的两端分别固定连接轴承,两轴承分别固定安装在两个安装板上,两安装板均固定安装在浮标上。
本申请中,蓄电池通过导线分别与360度摄像头、电动推杆、控制器、电机、手动启动开关以及手动停止开关电连接,为360度摄像头、电动推杆、控制器、电机、手动启动开关以及手动停止开关提供电能。
本实施例一的工作原理是:本申请中,工作人员可通过操控启动单元的手动启动开关来控制伸缩装置和动力装置进行工作,具体来说,工作人员操控启动单元的手动启动开关后,手动启动开关会向控制器发送启动信号,控制器接收到启动信号会控制电动推杆和电机进行工作,电动推杆的伸缩杆端部在控制器的控制作用下会按照控制器预设的程序,先间歇性地向下伸长(即伸缩装置的伸缩杆端部每隔一定时间向下伸长一定长度),然后间歇性地向上缩短(即伸缩装置的伸缩杆端部每隔一定时间向上缩短一定长度),如此不断往复;而与电动推杆伸缩杆端部固定连接的360度摄像头则可将采集到的水生生物图像信息反馈给控制器,控制器通过以太网将视频、图片数据信息传输给4G模块,4G模块通过HTTP协议将数据信息传输到PC端;而电机进行工作时,电机能够在控制器的控制作用下按照控制器预设的程序进行正转一定圈数而后再反转一定圈数,当电机正向转动时,就会带动与电机输出轴连接的卷线装置中的转轴进行转动,该转轴转动又会带动与其连接的导线滚轮进行转动,该导线滚轮转动则会将缠绕在导线滚轮置上的拉线进行放线,由于杂物清除装置的金属重力环自身具有重力,当卷线装置上的拉线进行放线,杂物清除装置会在自身重力的作用下向下移动对透明套筒外侧壁上的附着物进行杂物清除工作,当电机反向转动时,电机会间接带动卷线装置的卷线滚轮进行卷线,即拉线会在卷线滚轮的作用下重新缠绕到卷线滚轮上,此时,杂物清除装置则会在拉线的作用下沿透明套筒向上移动,如此杂物清除装置不断往复运动以对透明套筒的外侧壁进行杂物清除工作;而当检测人员不需要再对某水域进行水生生物信息进行原位采集时,检测人员只需手动按一下手动停止开关,控制器控制各部件即停止工作。
实施例二:
实施例二与实施例一的不同之处是:本实施例二中浮标上也固定设有启动停止单元,本实施例二中的启动停止单元具体结构为:启动停止单元包括固定在浮标上的信号接收器,信号接收器与控制器的输入端电连接,信号接收器通过无线信号连接信号发射器,信号发射器与信号接收器相适配,信号发射器固定在遥控器上,遥控器上固定设有启动按键和停止按键。该上述设置可便于检测人员通过遥控器进行启动或者停止本申请对水生生物进行检测的过程。
本实施例二的工作原理与实施例一的工作原理不同之处在于,本实施例二中检测人员需要通过遥控器来控制本申请的启动,具体为:检测人员按下遥控器上的启动按键时,遥控器上的信号发射器会将启动信号发送给信号接收器,信号接收器接收到启动信号后会将该启动信号反馈给控制器,控制器则开始控制伸缩装置和动力装置开始进行工作,而当检测人员需要停止本申请的检测时,检测人员则可按一下遥控器上的停止按钮,控制器控制各部件即停止工作;其他工作原理与实施例一相同。
实施例三:
实施例三与实施例一的不同之处是:本实施例三中浮标上还固定设有另一种种类型的启动停止单元,该另一种类型的启动停止单元的结构与实施例二中采用的启动停止单元结构相同。
本实施例三的工作原理与实施例一的工作原理不同之处在于,本实施例三中检测人员既可通过手动启动开关和手动停止开关来控制本申请,也可通过遥控器来控制本申请。
- 水生生物原位信息采集装置
- 生物特征信息采集方法、生物特征信息采集装置及终端