摇动装置、光学部件驱动装置以及电子设备
文献发布时间:2023-06-19 10:08:35
技术领域
本发明涉及一种摇动装置、光学部件驱动装置以及电子设备。
背景技术
众所周知,例如,作为驱动透镜的透镜驱动装置,其在以Z方向为光轴方向的三维XYZ直角坐标系中,将透镜向XY两方向驱动,以进行抖动补偿。例如,专利文献1:公开日为2006年12月7日,文献号为JP2006330678A的日本专利文献,以及专利文献2:公开日为2006年11月29日,文献号为CN1869763A的中国专利文献,对上述驱动透镜的透镜驱动装置的相应结构有所记载。
在上述专利文献1中,作为固定体、中间支撑体以及可动体的三段结构,使其重叠在Z方向,在固定体和中间支撑体之间以及中间支撑体和可动体之间分别形成的导向槽上配置球体的结构,该结构使可动体向XY方向摇动。
一直以来,正如上述两个案例,均存在一个问题,即由于是固定体、中间支撑体以及可动体的三段结构,因此会导致Z方向的厚度变厚。
发明内容
本发明的目的是提供一种可使Z方向的厚度变薄的摇动装置、光学部件驱动装置以及电子设备。并采取以下的技术方案:
一种摇动装置,在三维XYZ直角坐标系中,具有在Z方向重叠的第一部件以及第二部件,所述第一部件在与所述第二部件相对的相对面上形成与X轴方向平行的若干X方向导向槽,所述第二部件在与所述第一部件相对的相对面上形成与Y轴方向平行的若干Y方向导向槽;进而具有嵌在所述X方向导向槽以及所述Y方向导向槽二者的球体。
在本技术方案中,由于摇动装置的厚度仅是第一部件的厚度、第二部件的厚度、第一部件和第二部件未装配的部分的球体的高度,所以在实现由球体带动第一、第二部件移动的同时,能使得摇动装置的总厚度得到降低。
优选的,由所述第一部件的Z方向中心轴等距离间隔形成两个X方向导向槽,由所述第二部件的Z方向中心轴等距离间隔形成的两个Y方向导向槽。
进一步的,所述球体被配置于从Z方向观察所述X方向导向槽与所述Y方向导向槽相交的位置。
进一步的,所述球体部分嵌入所述X方向导向槽内,部分嵌入所述Y方向导向槽内。
一种摇动装置,在三维XYZ直角坐标系中,具有在Z方向重叠的第一部件以及第二部件、设置在所述第一部件上,具有两根向X方向延伸的轴,且以该轴为中心自由旋转的X方向支撑滚轮组以及设置在所述第二部件上,具有两根向Y方向延伸的轴,且以该轴为中心自由旋转的Y方向支撑滚轮组;进而具有嵌在所述X方向支撑滚轮组以及所述Y方向支撑滚轮组二者的球体。
在本技术方案中,由于摇动装置的厚度仅是第一部件的厚度、第二部件的厚度、第一部件和第二部件未装配的部分的球体的高度,所以在实现由球体带动第一、第二部件移动的同时,能使得摇动装置的总厚度得到降低。
优选的,所述的四个所述球体,分别位于类矩形的四个顶点上,平行于Y方向位于+X侧的二个所述球体在Y方向上沿一个方向移动,平行于Y方向位于-X侧的剩下的二个所述球体在Y方向上沿另一个方向移动,使得所述第一部件相对于所述第二部件绕Z轴旋转。
一种光学部件驱动装置,采用上述摇动装置,以光轴方向为Z方向,以所述第一部件以及所述第二部件中的一个部件为固定体,以另一个部件为可动体,在所述固定体和/或可动体上设置光学部件。
一种电子设备,其具有上述的光学部件驱动装置。
本发明的有益效果在于:
可使得摇动装置、光学部件驱动装置、及电子设备Z方向的厚度变薄。
附图说明
图1为显示本发明的第一实施例所涉摇动装置的轴侧图。
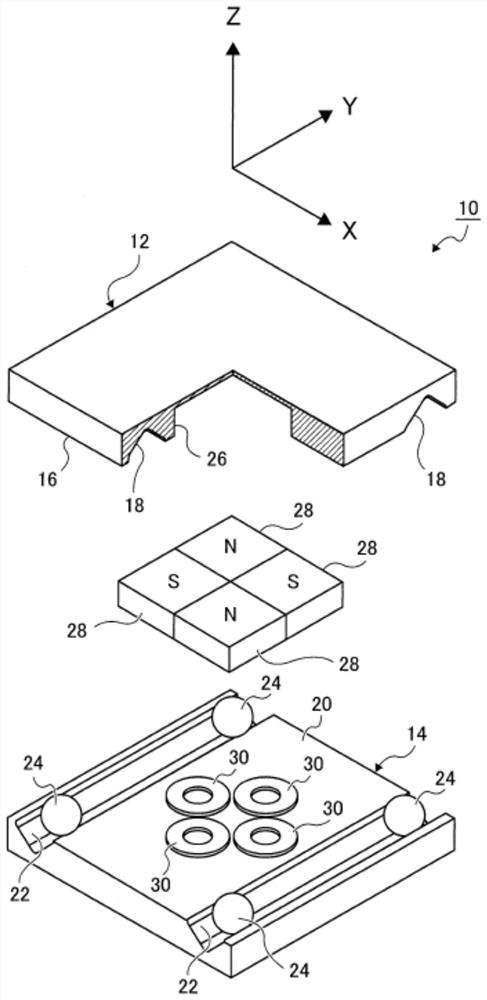
图2为显示本发明的第一实施例所涉摇动装置的切割开一部分后的分解轴测图。
图3为本发明的第一实施例所涉摇动装置中将第一部件可视化的轴测图。
图4为本发明的第一实施例所涉摇动装置中显示摇动状态的平面图,其中:(a)显示初始位置、(b)显示向XY合成方向移动、(c)显示Z轴周围的旋转。
图5为显示关于使用本发明的第一实施例所涉摇动装置的照相装置的分解轴测图。
图6为显示本发明的第二实施例所涉摇动装置的轴测图。
图7为显示本发明的第二实施例所涉摇动装置的切割开一部分后的分解轴测图。
图8为显示本发明的第二实施例所涉摇动装置使用的球体以及支撑滚轮的轴测图。
图中,10.摇动装置,12.第一部件,14.第二部件,16.第一部件的相对面,18.X方向导向槽,20.第二部件的相对面,22.Y方向导向槽,24.球体,26.凹部,28.磁石,30.线圈,32.照相装置,34.自动聚焦组件,36.基台,38.筐体,40.透镜,42.入射孔,44.图像传感器,46.球体配置槽,48.X方向支撑滚轮,50.Y方向支撑滚轮,52.X方向支撑轴,54.Y方向支撑轴,56.背面侧轭,58.前面侧轭。
具体实施方式
实施例一:
图1至图3显示本发明的第一实施例所涉摇动装置10。摇动装置10在三维XYZ直角坐标系中,具有在Z方向重叠的第一部件12以及第二部件14。
第一部件12以及第二部件14从Z方向观察形成正方形的板状。第一部件12为例如可动体,第二部件14为固定体。而且,第一部件12如后文所述,相对于第二部件14在X、Y方向以及Z轴周围摇动。
第一部件12具有与第二部件14相对的相对面16,在相对面16上形成与X轴平行且向X轴延伸的例如两个X方向导向槽18,18,X方向导向槽18,18的截面呈V字形,形成于第一部件12的±Y方向端附近,并从第一部件12的中心等距离地间隔排列。
第二部件14具有与第一部件12相对的相对面20,在相对面20上形成与Y轴平行且向Y轴延伸的例如两个Y方向导向槽22,22。Y方向导向槽22,22的截面呈V字形,形成于第二部件14的±Y方向端附近,并从第二部件14的中心等距离地间隔排列。
而且,X方向导向槽18,18的±X方向端以及Y方向导向槽22,22的±Y方向端分别处于开放状态,但是也可分别处于关闭状态,以构成与后文所述球体24的移动相对的挡块。另外,X方向引导槽18和Y方向引导槽22也可以只设置在与各球体24对应的位置。
在第一部件12和第二部件14之间,存在例如四个球体24。各个球体24被嵌入X方向导向槽18和Y方向导向槽22,以保证第一部件12和第二部件14之间的距离。即,分别在从Z方向观察X方向导向槽18与Y方向导向槽22相交的四个位置配置一个球体24,且四个位置位于类矩形的四个顶点上。
与此同时,为了使球体24容易滑动,X方向导向槽18,18以及Y方向导向槽22,22最好由摩擦系数低的材料构成,或者采用涂抹润滑油等应对措施。而且,上述建议也可适用于球体24。
而且,如图2所示,在第一部件12的相对面16的中央部中,形成向+Z方向凹陷的凹部26。该凹部26与第一部件12的外形相配合形成正方形。该凹部26上安装四块磁石28。四块磁石28的表面磁极相互不同,且被循环配置在Z轴周围。
另一方面,在第二部件14的相对面20上,配置例如圆形的四个线圈30。磁石28,28与线圈30隔开空间在Z方向相向而对。在线圈30和第二部件14的相对面20之间,也可配置磁性体板。各个线圈30缠绕,跨过相邻的两块磁石28。一旦给线圈30通电,在磁石28,28上将产生相同方向的洛伦兹力。如果给比如配置在±X侧的线圈30,30通电,则使相向而对的两块磁石28,28分别产生+Y方向或者-Y方向的推力。通过调整给各线圈30的通电量、通电方向及其差,可相对于第一部件12产生向XY方向的移动推力和Z轴周围的旋转推力。
而且,与所述实施例相反,也可分别将线圈30设置在第一部件12、将磁石28设置在第二部件14上。而且,对一个X方向导向槽18、一个Y方向导向槽22分别分配两个球体24,但是也可对一个X方向导向槽18、一个Y方向导向槽22分别分配一个球体24。即,也可将四个X方向导向槽18、四个Y方向导向槽22以及四个球体24配置在四个角落。
随后,在所述实施例中,使用图4针对使第一部件12相对于第二部件14摇动(XY方向移动和Z轴周围旋转)时的作用进行说明。
而且,在图4中,X轴线是连结1个X方向导向槽18的两个球体24,24中心的线,Y轴线是连结一个Y方向导向槽22的两个球体24,24中心的线,○表示移动前的球体24的初始状态位置,●表示移动后的球体24的位置。
图4(a)显示初始状态,其中第一部件12和第二部件14的正面重合,且四个球体24位于X轴线与Y轴线相交的位置。
图4(b)显示关于使可动体第一部件12相对于固定体第二部件14向XY合成方向(图4中的右上方向)移动的情形。在说明XY合成方向移动之前,首先对X方向的移动进行说明:在充分确保润滑的情况下,球体24不在第二部件14的Y方向导向槽22的V槽内移动,在该状态下一边旋转一边滑动,在第一部件12的X方向导向槽18内向X方向转动。而且,如果没有润滑,则球体24在第二部件14的Y方向导向槽22的V槽内静止,在第一部件12的X方向导向槽18内向X方向滑动。而且,如果润滑不足,则装置将在混合上述两种状态的情况下移动。
下面对XY合成方向的移动进行说明。在图4(b)中,第二部件14的Y方向导向槽22的位置不变,但是第一部件12的X方向导向槽18向XY合成方向移动。如果第一部件12的X方向导向槽18向XY合成方向移动,则球体24在X方向导向槽18以及Y方向导向槽22移动,保持在X轴线和Y轴线相交的位置,容许第一部件12向XY合成方向移动。
图4(c)显示关于使第一部件12相对于第二部件在Z轴周围旋转(图中顺时针旋转)的情形。第二部件14的Y方向导向槽22的位置不变,但是第一部件12的X方向导向槽18在Z轴周围旋转。如果第一部件12的X方向导向槽18在Z轴周围旋转,则球体24在X方向导向槽18以及Y方向导向槽22移动,保持在X轴线和Y轴线相交的位置,容许第一部件12在Z轴周围旋转。此时,平行于Y方向位于+X侧的二个所述球体24沿着+Y方向移动,平行于Y方向位于-X侧的剩下的二个所述球体24沿着-Y方向移动。如果球体24反向移动,则第一部件12会反向旋转。
如上所述,由于该第一实施例所涉摇动装置10通过第一部件12和第二部件14将球体夹在其中,因此可使Z方向的厚度变薄。而且,其容许X方向、Y方向的移动以及Z轴周围的旋转。
图5显示关于使用所述第一实施例所涉摇动装置10的光学部件驱动装置的一个实例,即照相装置32。照相装置32被用作例如手机或智能手机等电子设备所使用的小型照相装置。
照相装置32由自动聚焦组件34、摇动装置10以及基台36组成。
自动聚焦组件34在筐体38内收纳透镜40。筐体38从透镜40的光轴方向观察呈四角形,在该筐体38的上面,形成使光入射的圆形入射孔。透镜40被未进行图示的透镜支撑体支撑,该透镜支撑体通过众所周知的自动聚焦机构向透镜40的光轴方向移动,调节从入射孔42入射的光,使其向后面所述的图像传感器44聚焦。筐体38的下端被固定在基台36上,使其相对于摇动装置10的第一部件12非接触。而且,第二部件14也被固定在基台36上。
而且,在该实施例中,以Z方向作为光轴方向。
图像传感器44被固定在第一部件12的上面。因此,图像传感器44通过摇动装置10相对于自动聚焦组件34(即透镜40)向XY方向移动,并在Z轴周围旋转,以对照相装置32进行抖动补偿。
实施例二:
图6以及图7显示本发明的第二实施例所涉摇动装置10。
所述第一实施例的结构通过X方向导向槽18以及Y方向导向槽22引导球体24,与之相对,而该第二实施例的结构则通过滚轮引导球体24。
即如图7所示,球体24被配置在形成于第一部件12以及第二部件14的四个角落的球体配置槽46上,配置在该球体配置槽46内的球体24通过X方向支撑滚轮48以及Y方向支撑滚轮50获得支撑。
球体配置槽46向X方向以及Y方向延伸,使球体24向X方向以及Y方向移动。
对于X方向支撑滚轮48组,其具有两根(即一对)向X方向延伸的X方向支撑轴52,该X方向支撑轴52被固定在第一部件12上,且为了以该X方向支撑轴52为中心自由旋转而被设置在第一部件12上。另一方面,Y方向支撑滚轮50组也同样具有2根两根(即一对)向Y方向延伸的Y方向支撑轴54,该Y方向支撑轴54被固定在第二部件14上,且为了以该Y方向支撑轴54为中心自由旋转而被设置在第二部件14上。
如图8所示,球体24的+Z侧与X方向支撑滚轮48接触,使其被两根X方向支撑滚轮48夹着,-Z侧与Y方向支撑滚轮50接触,使其被两根Y方向支撑滚轮50夹着。因此,如果使第一部件12向比如X方向移动,则球体24不在Y方向支撑滚轮50上移动,此时在该状态下转动,X方向支撑滚轮48在球体24上向X方向移动,容许第一部件12移动。而且,如果使第一部件12在Z轴周围旋转,则球体24转动,以至于不在X方向支撑滚轮48以及Y方向支撑滚轮50上移动,容许第一部件12的旋转。
而且,在第一部件12的背面(+Z侧面),固定着与四块磁石28同样形状的背面侧轭56。四块磁石28通过磁力被固定在该背面侧轭56上。而且,在第二部件14的中央,设置与四块磁石28同样形状的前面侧轭58,线圈30被固定在该前面侧轭58上。在背面侧轭56和前面侧轭58上流过来自磁石28的磁力线,以提高磁力效率。而且,前面侧轭58通过磁石28的磁力被磁石28吸引,因此第一部件12被第二部件14吸引,相对于第二部件14被保持着吸附状态。进而,在第一部件12相对于第二部件14移动时,可赋予使第一部件12返回初始位置的复原力。
本发明的第二实施例所涉的摇动装置10通过设置在第一部件12以及第二部件14上的支撑滚轮48、50将球体24夹在其中,因此可使Z方向的厚度变薄。而且,容许X方向、Y方向的移动以及Z轴周围的旋转。而且对于与第一实施例相同的部分,在图纸中附上同一编号,省略其说明。
在上述两项实施例中,显示旨在调整透镜或者图像传感器位置的摇动装置,但是本发明不限于此,其还可适用于例如调整发光元件的发光位置、调整制造工序的半导体等位置的装置。
- 摇动装置、光学部件驱动装置以及电子设备
- 驱动装置、光学部件驱动装置、照相装置以及电子设备