桥墩、高耸结构用集成式整体多功能施工平台
文献发布时间:2023-06-19 10:19:37
【技术领域】
本发明涉及建筑施工领域,特别涉及一种桥墩、高耸结构用集成式整体多功能施工平台。
【背景技术】
桥墩等结构现场施工时,需要用模板围合出混凝土的浇筑空间,并需在模板内放置钢筋笼以加强结构强度。模板、钢筋笼等建筑材料通常需要使用地面吊机进行吊装;而工作人员作业时,则需要依靠墩柱临时搭建脚手架和作业平台;而墩柱的施工过程中,需要反复拆装模板。现有施工方式中,模板的拆装也依靠于吊机进行拆装。这种施工方式,由于施工设备功能单一且使用相对独立,因此要启用多种设备才能完成整个施工作业,这样不仅占用施工场地较多,而且拆装工作繁多,在一定程度上会影响施工进度,而且反复的拆装过程中容易存在安全风险,因此,需要设计一种集成度高、智能化程度高的施工平台,从而利于桥墩等结构的现场施工,提高施工效率。
【发明内容】
本发明旨在解决上述问题,而提供一种桥墩、高耸结构用集成式整体多功能施工平台。
为解决上述问题,本发明提供了一种桥墩、高耸结构用集成式整体多功能施工平台,其特征在于,其包括间隔设置的第一立柱和第二立柱、爬升装置、升降机构、作业平台、液压模板装置和悬臂回转吊,所述爬升装置分别设于所述第一立柱和第二立柱上,并可沿所述第一立柱和第二立柱进行爬升;所述升降机构与所述爬升装置连接,所述升降机构可在所述爬升装置的带动下沿所述第一立柱和第二立柱的方向进行升降;所述作业平台设于所述第一立柱和第二立柱之间,所述作业平台的两端可与所述升降机构连接而随所述升降机构升降;所述液压模板装置设于所述作业平台上,用于通过液压驱动而实现合模和拆模;所述悬臂回转吊设于所述作业平台上,用于完成所述液压模板装置的吊装和向所述液压模板装置内吊装钢筋笼。
进一步地,在所述作业平台的底部设有若干支撑固定部,在所述支撑固定部上设有插孔,所述插孔用于通过紧固件而将所述作业平台紧固在墩柱上预埋有穿心孔的位置处。
进一步地,在所述升降机构上设有自升式立竿吊。
进一步地,在所述作业平台上设有自动喷淋和蒸汽养护装置,其用于对混凝土进行喷淋和蒸汽养护。
进一步地,在所述作业平台的底部设有实时检测作业平台受力情况的重力传感器。
进一步地,所述液压模板装置包括模板立柱框架、模板、水平液压撑、斜向液压撑和液压控制系统,所述模板立柱框架设于所述作业平台上;所述模板位于所述模板立柱框架内;所述水平液压撑呈水平设置,一端与所述模板立柱框架连接,一端与所述模板连接;所述斜向液压撑与所述水平液压撑倾斜呈角度,所述斜向液压撑的一端与所述模板立柱框架连接,一端与所述模板连接;所述液压控制系统与所述水平液压撑和斜向液压撑连接,用于控制所述水平液压撑和斜向液压撑自动伸缩。
进一步地,所述模板包括可对合成筒状的第一模板和第二模板;所述模板立柱框架包括间隔设置的第一立柱框架和第二立柱框架;所述水平液压撑包括第一水平液压撑和第二水平液压撑,所述第一水平液压撑连接于所述第一模板与第一立柱框架之间,所述第二水平液压撑连接于所述第二模板与第二立柱框架之间;所述斜向液压撑包括第一斜向液压撑和第二斜向液压撑,所述第一斜向液压撑连接于所述第一模板与第一立柱框架之间,所述第二斜向液压撑连接于所述第二模板与第二立柱框架之间。
进一步地,所述液压模板装置包括第一激光发射器、第二激光发射器、第一激光接收器、第一激光接收器和处理器,所述第一激光发射器和第二激光发射器,分别固定设于所述模板立柱框架上,并位于不同高度处;所述第一激光接收器和第二激光接收器,分别固定设于所述模板上,所述第一激光接收器可接收所述第一激光发射器的激光信号;所述第二激光接收器可接收所述第二激光发射器的激光信号;所述处理器分别与所述第一激光接收器、第二激光接收器及液压控制系统连接,其可根据所述第一激光接收器和第二激光接收器接收到激光信号的时间而计算出所述模板的倾斜度和校正所述模板所需控制的水平液压撑和斜向液压撑的伸缩量。
进一步地,在所述作业平台上设有照明装置。
进一步地,在所述作业平台上设有防雷接地装置。
本发明的有益贡献在于,其有效解决了上述问题。本发明的桥墩、高耸结构用集成式整体多功能施工平台包括立柱、爬升装置、升降机构、作业平台、液压模板装置、悬臂回转吊、自升式立竿吊,其集成度高,可自动升降、自行吊装、自动检测和校正,自动合模和自动拆模,进行混凝土养护等,其集成度高,且智能化程度高,其适用于高速公路、公路、高速铁路、铁路的桥墩以及城乡混凝土高耸独立细长建筑物的施工,其可提高施工效率。本发明的桥墩、高耸结构用集成式整体多功能施工平台具有功能实用,易于使用的特点,其具有很强的实用性。
【附图说明】
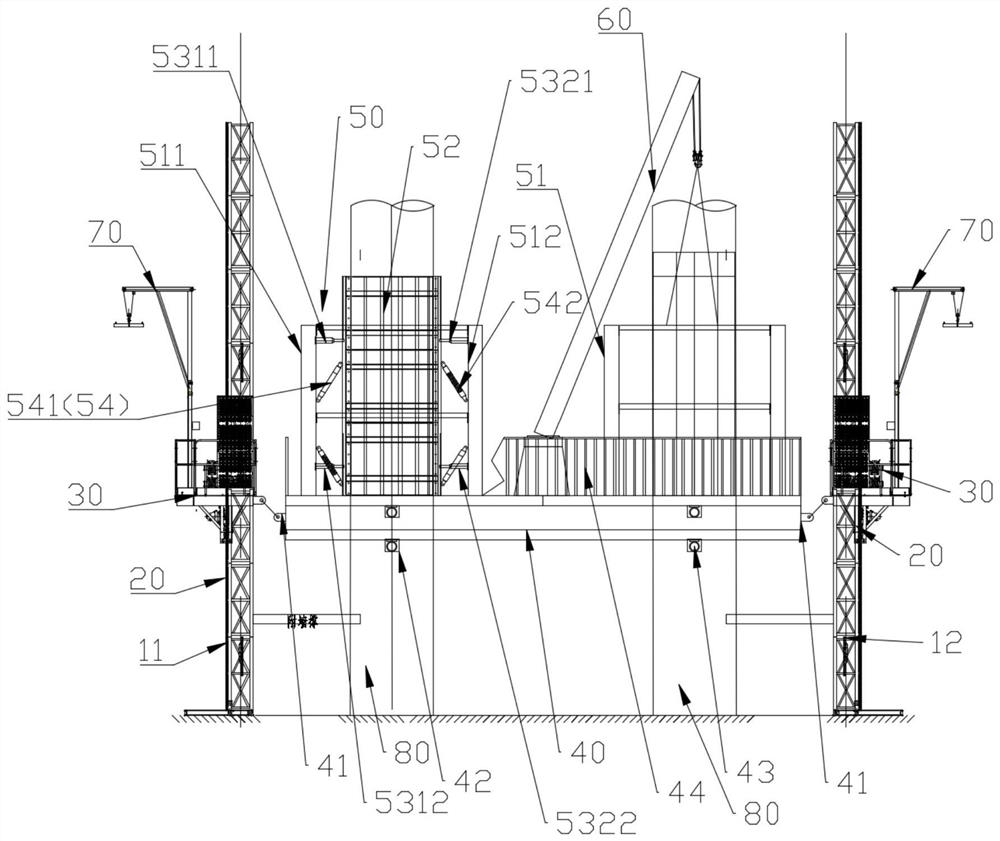
图1是本发明的主视图。
图2是图1的俯视图。
图3是图1的侧视图。
图4是模板自动校模的原理框图。
附图标识说明:立柱10、第一立柱11、第二立柱12、爬升装置20、升降机构30、作业平台40、连接耳41、支撑固定部42、插孔43、防护栏44、行走区45、施工区46、液压模板装置50、模板立柱框架51、第一立柱框架511、第二立柱框架512、模板52、第一模板521、第二模板522、水平液压撑53、第一水平液压撑531、第一上水平液压撑5311、第一下水平液压撑5312、第二水平液压撑532、第二上水平液压撑5321、第二下水平液压撑5322、斜向液压撑54、第一斜向液压撑541、第二斜向液压撑542、液压控制系统55、自动校模装置56、第一激光发射器561、第二激光发射器562、第一激光接收器563、第二激光接收器564和处理器565、悬臂回转吊60、自升式立竿吊70、墩柱80。
【具体实施方式】
下列实施例是对本发明的进一步解释和补充,对本发明不构成任何限制。
如图1~图3所示,本发明的桥墩、高耸结构用集成式整体多功能施工平台包括立柱10、爬升装置20、升降机构30、作业平台40、液压模板装置50、悬臂回转吊60、自升式立竿吊70。
如图1~图3所示,所述立柱10包括第一立柱11和第二立柱12。所述第一立柱11和第二立柱12间隔设置,应用时,其设置于待施工位置的两侧。所述立柱10可参考公知的钢架结构。
如图1~图3所示,所述爬升装置20设于所述第一立柱11和第二立柱12上,其可沿所述第一立柱11和第二立柱12进行爬升。本实施例中,所述爬升装置20选用公知的自升式齿轮齿条爬升结构,其与平时施工电梯行走速度相同,能自动检测受力状态,在上升中可有效的与墩柱80附着连接,保证升降机构30的安全性。所述爬升装置20对称设置于所述第一立柱11和第二立柱12上,可保证结构的平衡。所述爬升装置20的安装,可参考公知技术。
如图1~图3所示,所述升降机构30与所述爬升装置20连接。所述升降机构30可在所述爬升装置20的带动下沿所述第一立柱11和第二立柱12的方向进行升降。本实施例中,在第一立柱11和第二立柱12上对称设置有所述升降机构30。所述升降机构30设有载人载货平台,作业人员可随乘坐升降机构30而上升到高空中以及进行安装操作。
如图1~图3所示,为方便完成爬升装置20的轨道的安装、拆线等工作,在所述升降机构30上设有自升式立竿吊70。所述自升式立竿吊70可参考公知结构。
所述作业平台40是进行混凝土浇筑的主要作业区域。如图1~图3所示,所述作业平台40横向设置于第一立柱11和第二立柱12之间。所述作业平台40的两端,可与所述升降机构30连接,从而可随升降机构30进行升降。所述作业平台40与升降机构30之间的连接,选用可拆卸连接。当需要升降改变作业高度时,作业平台40的两端与升降机构30连接在一起,升降机构30在爬升装置20的带动下进行升降时,将带动作业平台40同步的升降。当需要在作业平台40上进行作业时,拆卸掉升降机构30与作业平台40之间的连接。本实施例中,在所述作业平台40的两端设有连接耳41,其用于与升降机构30通过铁链等连接件进行可拆卸连接。
如图1~图3所示,在所述作业平台40的底部设有若干支撑固定部42,在所述支撑固定部42上设有插孔43,其用于安装紧固件而将作业平台40紧固在墩柱80上。当所述作业平台40升降至所需位置时,通过在所述插孔43内装入紧固件,便可将作业平台40紧固在墩柱80上预埋有穿心孔的位置处,从而可将作业平台40的负荷传递到墩柱80上。
如图1所述,所述作业平台40上设有防护栏44,其可保证作业人员安全性。
如图2所示,所述作业平台40设有行走区45和施工区46。所述行走区45用于作业人员行走进行操作。本实施例中,所述行走区45呈“口”字状。所述施工区46用于吊装模板52、钢筋笼、混凝土等。所述施工区46位于所述行走区45的内部,其为镂空区。换言之,所述作业平台40的四边为行走区45,其内部中空而形成可用于桥墩、高耸结构施工的施工区46。
在一些实施例中,可在所述作业平台40上设置自动喷淋和蒸汽养护装置(图中未示出),其可用于对混凝土进行喷淋和蒸汽养护。
在一些实施例中,可在所述作业平台40的底部设置重力传感器(图中未示出),其可实时监测作业平台40的受力情况,以确保作业平台40的安全。
如图1、图2所示,所述液压模板装置50设于作业平台40上,其用于通过液压驱动而实现合模、拆模及校模,以保证模板52安装的水平度和垂直度。
如图1、图2、图4所示,所述液压模板装置50包括模板立柱框架51、模板52、水平液压撑53、斜向液压撑54、液压控制系统55及自动校模装置56。
如图1、图2所示,所述模板立柱框架51用于支撑液压模板52的安装,以及辅助钢筋笼的安装。所述模板立柱框架51的数量,与墩柱80施工数量相关。当需要浇筑独立桥墩时,所述模板立柱框架51设有一个。当需要浇筑两个桥墩等结构时,所述模板立柱框架51设有两个。所述模板立柱框架51包括间隔设置的第一立柱框架511和第二立柱框架512。所述第一立柱框架511、第二立柱框架512竖直设置于所述作业平台40上,其中,第一立柱框架511设置于所述作业平台40的行走区45,第二立柱框架512设置于所述作业平台40的施工区46,即镂空区。所述第二立柱框架512底部的两端分别与所述作业平台40的行走区45固接。
如图1、图2所示,所述模板52包括可对合成筒状的第一模板521和第二模板522。所述模板52的形状,与所需浇筑的墩柱80形状相关;当需要浇筑出圆柱形墩柱80时,所述模板52呈圆筒状。当需要浇筑方柱时,所述模板52呈矩形筒状。本实施例中,所述第一模板521和第二模板522形状一致,其均为半圆形模板52,其对合成圆筒状。所述模板52设于所述模板立柱框架51范围内。所述模板52的数量,与模板立柱框架51的数量相关。本实施例中,设有两幅模板52。
如图1、图2所示,所述水平液压撑53呈水平设置,其与所述液压控制系统55连接,其可在所述液压控制系统55的控制下进行伸缩。所述水平液压撑53连接于所述模板52与模板立柱框架51之间。具体的,所述水平液压撑53包括第一水平液压撑531和第二水平液压撑532。所述第一水平液压撑531连接于第一模板521与第一模板立柱框架51之间。所述第二水平液压撑532连接于所述第二模板522与第二模板立柱框架51之间。
如图1、图2所示,为便于自动校正模板52的水平度和垂直度,所述第一水平液压撑531包括上下不同高度的第一上水平液压撑5311和第一下水平液压撑5312。所述第二水平液压撑532包括上下不同高度的第二上水平液压撑5321和第二下水平液压撑5322。本实施例中,所述第一上水平液压撑5311和第二上水平液压撑5321位于同一高度;所述第一下水平液压撑5312和第二下水平液压撑5322位于同一高度。
如图1、图2所示,所述斜向液压撑54与所述水平液压撑53倾斜呈角度,所述斜向液压撑54与所述液压控制系统55连接,其可在所述液压控制系统55的控制下进行伸缩。所述斜向液压撑54的一端与所述模板立柱框架51连接,一端与所述模板52连接。具体的,所述斜向液压撑54包括第一斜向液压撑541和第二斜向液压撑542。所述第一斜向液压撑541连接于所述第一模板521与第一模板立柱框架51之间。所述第二水平液压撑532连接于所述第二模板522与第二模板立柱框架51之间。
为稳定支撑所述第一模板521和第二模板522,本实施例中,设有多个第一斜向液压撑541和多个第二斜向液压撑542,其呈对称设置:上下对称,左右对称。
如图4所示,所述液压控制系统55用于自动控制所述水平液压撑53和斜向液压撑54进行伸缩,以实现合模或拆模。所述液压控制系统55与所述水平液压撑53、斜向液压撑54连接。
如图4所示,所述自动校模装置56用于自动校正模板52安装的水平度和垂直度,以保证模板52安装的准确性。所述自动校模装置56与所述液压控制系统55连接,所述自动校模装置56向液压控制系统55提供反馈,液压控制系统55根据反馈自动控制所述水平液压撑53和斜向液压撑54的伸缩量,从而保证模板52安装的垂直度和水平度。
如图4所示,所述自动校模装置56包括第一激光发射器561、第二激光发射器562、第一激光接收器563、第二激光接收器564和处理器565。
所述第一激光发射器561和第二激光发射器562分别设于所述模板立柱框架51上,并位于不同高度处。本实施例中,在第一模板立柱框架51和第二模板立柱框架51的顶部分别设有一个第一激光发射器561,在第一模板立柱框架51和第二模板立柱框架51的底部分别设有一个第二激光发射器562。
所述第一激光接收器563和第二激光接收器564分别固定设于所述模板52上,其中,第一激光接收器563可接收第一激光发射器561的激光信号;第二激光接收器564可接收第二激光发射器562的激光信号。所述第一激光接收器563与第一激光发射器561的数量一致,所述第二激光接收器564与第二激光发射器562的数量一致。
对于本实施例中的圆筒形模板52,所述第一激光发射器561和第一激光接收器563分布于同一直径线上,所述第二激光发射器562和第二激光接收器564分布于同一直径线上,并与第一激光发射器561和第一激光接收器563所处的直径线平行。当模板52安装处于正确位置时,所述多个第一激光接收器563与第一激光发射器561共线,多个第二激光发射器562与第二激光接收器564共线,且第一激光接收器563与第一激光发射器561之间的距离相等,第二激光接收器564与第二激光发射器562之间的距离相等,且第一激光接收器563与第一激光发射器561之间的距离,和第二激光接收器564与第二激光发射器562之间的距离一致。因此,合模时,若模板52安装到位,则各激光接收器接收到激光的时间是一致的,若接收激光的时间出现误差,则代表模板52出现歪斜而需要校正。
所述第一激光接收器563和第二激光接收器564的接收范围,与模板52安装存在的倾斜度相关,当模板52正常安装而出现歪斜时,所述第一激光接收器563和第二激光接收器564依然能接收到激光信号,此时,第一激光接收器563与第一激光发射器561之间的激光路径距离、第二激光接收器564与第二激光发射器562之间的激光路径距离发生变化,从而导致接收到激光信号的时间发生变化;通过多个激光接收器接收到激光的时间值,便能计算出模版52的倾斜角度,从而可进一步得出校模时的液压撑的伸缩量。
如图4所示,所述第一激光接收器563、第二激光接收器564分别与所述处理器565连接,所述处理器565则与液压控制系统55连接。当所述第一激光接收器563、第二激光接收器564接收到激光信号后,其信号传输至所述处理器565,所述处理器565可根据第一激光接收器563、第二激光接收器564接收到激光信号的时间是否一致而判断模板52是否安装到位。当模板52安装到位时,各激光接收器接收到激光信号的时间一致;当时间不一致时,则表明模板52存在倾斜度,此时,根据时间差及自动校模装置56器件之间的距离参数,处理器565可计算出模板52的倾斜程度,从而可通过所述液压控制系统55而控制所述水平液压撑53、斜向液压撑54的伸缩量而自动调整模板52的角度,以校正模板52安装的水平度和垂直度。
所述悬臂回转吊60设于所述作业平台40上,其用于完成所述液压模板装置50的吊装和向所述液压模板装置50内吊装钢筋笼。所述悬臂回转吊60可选用公知结构,其设于所述作业平台40的行走区45。
在一些实施例中,可在所述作业平台40上设置照明装置和防雷接地装置(图中未示出),以便于夜间施工和突降暴雨。
在一些实施例中,可在所述作业平台40上设置质量检测、涂装、修复及操作平台。换言之,可根据需要而在所述作业平台40上进行作业和搭载设备。
藉此,便形成了本发明的桥墩、高耸结构用集成式整体多功能施工平台,其适用于桥墩或高耸建筑。本发明的桥墩、高耸结构用集成式整体多功能施工平台的使用方法为:
利用爬升装置20进行爬升,使升降机构30提升至所需高度;升降机构30提升过程中,作业平台40与升降机构30连接在一起,因而作业平台40随升降机构30上升至所需高度;到达安装高度后,将作业平台40紧固到墩柱80上预埋穿心孔的位置处,将负荷传递到墩柱80上,然后拆卸升降机构30与作业平台40之间的连接,升降机构30可根据需求而进行升降以载人载物;当作业平台40紧固到墩柱80上后,便可在作业平台40上进行作业;作业时,悬臂回转吊60吊装钢筋笼,将钢筋笼放入液压模板装置50的模板52内,然后液压模板装置50进行合模和校模,使模板52正确的围合在钢筋笼外;然后使用悬臂回转吊往模板52内浇筑混凝土;待混凝土固化后,液压模板装置50进行拆模,使模板52与浇筑好的混凝土墩柱80脱离;随后,再次利用爬升装置20进行爬升进行下一环节的施工操作。
尽管通过以上实施例对本发明进行了揭示,但是本发明的范围并不局限于此,在不偏离本发明构思的条件下,以上各构件可用所属技术领域人员了解的相似或等同元件来替换。
- 桥墩、高耸结构用集成式整体多功能施工平台
- 一种电梯井内集成式整体施工平台系统