一种确定最大动态定位误差的方法及系统
文献发布时间:2023-06-19 10:21:15
技术领域
本发明属于煤矿设备检测技术领域,尤其涉及一种确定最大动态定位误差的方法及系统。
背景技术
煤矿井下的工作环境恶劣,地质环境复杂,一直存在着多种地质灾难的隐患,加之人为原因,导致矿井恶性事故不断发生,井下工作人员的生命安全受到严重威胁。随着科学技术的不断进步,煤矿井下可以安装有人员定位系统,以便获知井下工作人员的位置,方便在发生矿难后及时开展救援工作以及日常生产中的管理调度。
目前,煤矿井下人员定位系统已经从传统落后的人员区域定位,升级为具有无线测距功能的精确定位,但是由于煤矿人员定位系统的定位精度关系到发生矿难后开展救援工作的效率,所以在投入使用之前,一般会以最大定位误差来衡量煤矿人员定位系统的定位精度,也就是说在定位系统投入使用之前,必须先确定该系统的最大动态定位误差,以判断定位系统的定位精度是否达到要求。
现有技术中,在确定最大动态定位误差时,由于难以保证参与误差计算的定位数据与参与误差计算的携卡人员所行至的实际位置在时间上一一准确对应,因此导致不能精准地确定最大动态定位误差,进而导致无法精准衡量定位系统的精度。
发明内容
针对现有技术存在的问题,本发明实施例提供了一种确定最大动态定位误差的方法及系统,用于解决现有技术中在对煤矿井下人员定位系统的定位精度进行检测时,无法准确确定出最大动态定位误差,导致无法检测煤矿井下人员定位系统的定位精度的技术问题。
本发明提供一种确定最大动态定位误差的方法,所述方法包括:
当移动节点在测试时长内通过读卡分站定位区域的测点时,获取所述移动节点经过各所述测点的第一时刻;所述测点包括至少一个,所述移动节点包括至少一个;
针对任一目标时刻,确定所述测试时长内与所述目标时刻最接近的第二时刻,在定位数据库中调取所述移动节点在所述第二时刻的第一定位坐标;所述目标时刻为所述第一时刻中的任一时刻;
获取测距设备在所述第二时刻测得的当前距离,根据所述当前距离确定所述移动节点的第二定位坐标;所述当前距离为所述移动节点与所述读卡分站之间的距离;
基于所述第一定位坐标及所述第二定位坐标确定最大动态定位误差。
可选的,所述在定位数据库中调取所述移动节点在所述第一时刻的第一定位坐标,包括:
基于所述第一时刻,在所述定位数据库中查找所述第一时刻对应的定位数据;
将所述定位数据转换为所述第一定位坐标。
可选的,所述根据所述当前距离确定所述移动节点的第二定位坐标,包括:
获取所述读卡分站对应的坐标;
基于所述当前距离及所述读卡分站对应的坐标确定所述移动节点的第二定位坐标。
可选的,所述基于所述第一定位坐标及所述第二定位坐标确定最大动态定位误差,包括:
根据公式
可选的,所述读卡分站的时间与上位机的时间同步。
本发明还提供一种确定最大动态定位误差的系统,所述系统包括:读卡分站、上位机、测距设备;其中,
所述上位机,用于当移动节点在测试时长内通过所述读卡分站定位区域的测点时,获取所述移动节点经过各所述测点的第一时刻;所述测点包括至少一个,所述移动节点包括至少一个;针对任一目标时刻,确定所述测试时长内与所述目标时刻最接近的第二时刻,在定位数据库中调取所述移动节点在所述第二时刻的第一定位坐标;所述目标时刻为所述第一时刻中的任一时刻;
所述测距设备,用于测量所述移动节点在所述第二时刻的当前距离;所述当前距离为所述移动节点与所述读卡分站之间的距离;
所述上位机还用于:获取所述当前距离,根据所述当前距离确定所述移动节点的第二定位坐标;基于所述第一定位坐标及所述第二定位坐标确定最大动态定位误差。
可选的,所述上位机具体用于:
基于所述第一时刻,在所述定位数据库中查找所述第一时刻对应的定位数据;
将所述定位数据转换为所述第一定位坐标。
可选的,所述上位机具体用于:
获取所述读卡分站对应的坐标;
基于所述当前距离及所述读卡分站对应的坐标确定所述移动节点的第二定位坐标。
可选的,所述上位机具体用于:
根据公式
可选的,所述读卡分站的时间与所述上位机的时间同步。
本发明提供了一种确定最大动态定位误差的方法及系统,方法包括:当移动节点在测试时长内通过读卡分站定位区域的测点时,获取所述移动节点经过各所述测点的第一时刻;所述测点包括至少一个,所述移动节点包括至少一个;针对任一目标时刻,确定测试时长内与所述目标时刻最接近的第二时刻,在定位数据库中调取所述移动节点在所述第二时刻的第一定位坐标;所述目标时刻为所述第一时刻中的任一时刻;获取测距设备在所述第二时刻测得的当前距离,根据所述当前距离确定所述移动节点的第二定位坐标;所述当前距离为所述移动节点与所述读卡分站之间的距离;基于所述第一定位坐标及所述第二定位坐标确定最大动态定位误差;如此,即使当移动节点在经过测点的目标时刻,此时若没有到达读卡分站的定位周期,导致读卡分站没有读取移动节点的定位数据时,为了确保参与误差计算的第一定位坐标能与参与误差计算的移动节点所在的实际位置在时间上可一一准确对应,在确定第一定位坐标时,先找到与目标时刻最接近的第二时刻,然后在定位数据库获取第二时刻对应的定位数据(第一定位坐标);在确定移动节点所在的实际位置时(第二定位坐标),同样的也是获取的测距设备在第二时刻测得的当前距离,再根据当前距离确定第二定位坐标;这样,第一定位坐标和第二定位坐标均是第二时刻对应的坐标,因此可以确保参与误差计算的第一定位坐标能与参与误差计算的移动节点所在的实际位置在时间上可一一准确对应,进而可以准确确定出最大动态定位误差,最终能准确衡量出煤矿井下人员定位系统的定位精度。
附图说明
图1为本发明实施例提供的确定最大动态定位误差的系统结构示意图;
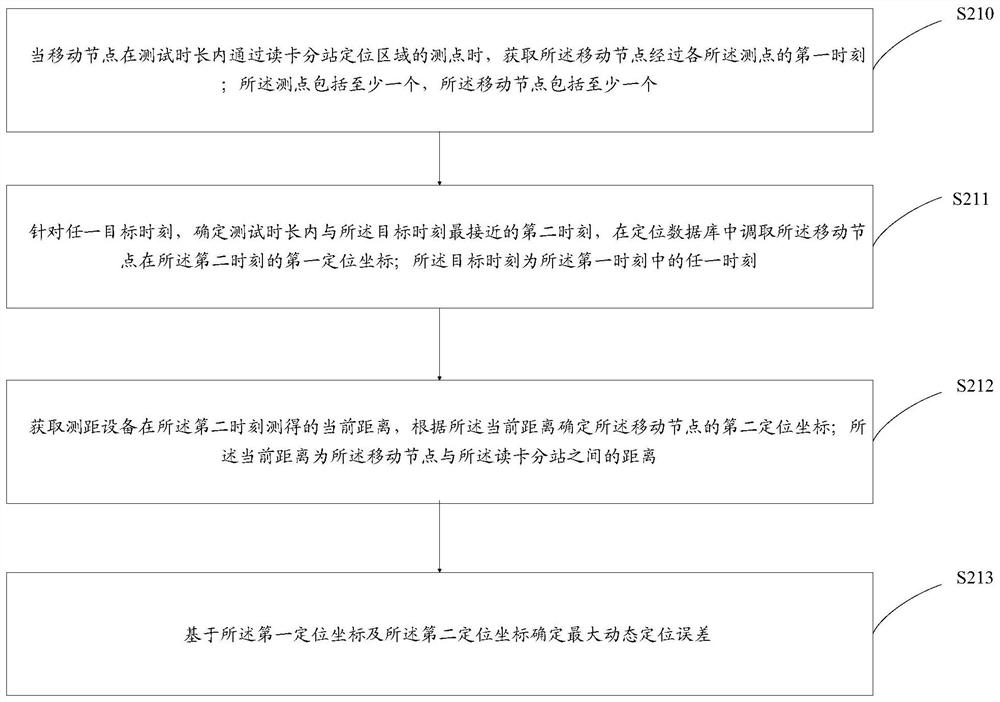
图2为本发明实施例提供的确定最大动态定位误差的方法流程示意图。
具体实施方式
为了解决现有技术中在对煤矿井下人员定位系统的定位精度进行检测时,无法准确确定出最大动态定位误差,导致无法检测煤矿井下人员定位系统的定位精度的技术问题,本发明提供了一种确定最大动态定位误差的方法及系统。
下面通过附图及具体实施例对本发明的技术方案做进一步的详细说明。
实施例一
本实施例提供一种确定最大动态定位误差的方法,主要是用于检测对煤矿井下人员定位系统的定位精度,为了能够更好地理解本实施例的技术方案,这里先介绍下确定最大动态误差的系统,如图1所示,系统包括:读卡分站1、测距设备2、计时设备3、图像采集设备4、移动节点5及上位机6;其中,
读卡分站1安装的有读卡设备,读卡分站1实质上为定位锚点。移动节点5为携带有标识卡的测试人员。
测距设备2安装在读卡分站1的正下方,计时设备3安装在测距设备2的一侧;测距设备2用于测量移动节点5的距离,计时设备3用于记录移动节点经过测点的时刻。
图像采集设备4用于采集测距设备2中的距离以及计时设备3的时间,图像采集设备4将采集到的距离数据及时间数据发送至上位机6中;上位机6中安装有煤矿井下人员定位系统的上位机软件系统。为了确保确定精度,读卡分站1的时间与上位机6的时间保持同步。
具体的,如图2所示,方法包括:
S210,当移动节点在测试时长内通过读卡分站定位区域的测点时,获取所述移动节点经过各所述测点的第一时刻;所述测点包括至少一个,所述移动节点包括至少一个;
这里,预先在读卡分站的定位区域设定测点,测点包括至少一个。具体的,可以在读卡分站附近,读卡分站定位区域的边界以及读卡分站定位区域的中间区域设定测点。其中,读卡分站定位区域的边界为定位区域的最大覆盖半径所在的区域。
举例来说,以读卡分站为中心,在距离读卡分站0~5m内设置测点;若定位区域的最大覆盖半径为200m,那么可以在100m附近设置测点。
测点设置完成后,然后移动节点在测试时长内按照正常步行速度通过读卡分站的定位区域,当移动节点通过读卡分站定位区域的测点时,获取移动节点经过各测点的第一时刻;移动节点包括至少一个,移动节点为携带有标识卡的测试人员,标识卡可与读卡分站进行通信,读卡分站在预设的定位周期内可以读取标识卡的定位数据。比如,定位周期为2s,那么读卡分站会每间隔2s来获取标识卡的定位数据。
当移动节点通过读卡分站定位区域的测点时,计时设备存储有各移动节点经过各测点的第一时刻,测距设备中存储有各移动节点经过各测点时的距离信息,图像采集设备在测试时长内采集计时设备中的第一时刻及距离信息,那么即可从图像采集设备中获取移动节点经过各所述测点的第一时刻T
举例来说,若h和i均为1时,那么获取的是第一个移动节点经过第一个测点时的第一时刻;若h和i均为2时,那么获取的是第二个移动节点经过第二个测点时的第一时刻;以此类推,即可获取到所有移动节点分别经过各测点的第一时刻。
S211,针对任一目标时刻,确定测试时长内与所述目标时刻最接近的第二时刻,在定位数据库中调取所述移动节点在所述第二时刻的第一定位坐标;所述目标时刻为所述第一时刻中的任一时刻;
这里,在实际应用中,可能会出现读卡分站的定位周期与移动节点经过测点的第一时刻不匹配的情况;也即当读卡分站在定位周期内读取移动节点的定位数据时,可能会出现移动节点还未达到某一测点,或者移动已经离开了某一测点。这样,读卡分站读取到的定位数据并不是移动节点在该测点的定位数据,导致后续确定最大动态定位误差时会降低确定精度。
那么为了提高最大动态定位误差的确定精度,本实施例针对任一目标时刻,确定测试时长内与目标时刻最接近的第二时刻T
这里,读卡分站在读取移动节点的定位数据时,会实时将定位数据及对应的第二时刻存储至定位数据库中;那么定位数据库中包括有第二时刻和定位数据的映射关系。作为一种可选的实施例,在定位数据库中调取所述移动节点在第一时刻的第一定位坐标,包括:
基于第一时刻,在定位数据库中查找第一时刻对应的定位数据;
将定位数据转换为第一定位坐标。
S212,获取测距设备在所述第二时刻测得的当前距离,根据所述当前距离确定所述移动节点的第二定位坐标;所述当前距离为所述移动节点与所述读卡分站之间的距离;
因测距设备也在一直测量移动节点的距离,因此在第二时刻,可以获取测距设备在第二时刻测得的当前距离。其中,测距设备可以为激光测距仪,也可以为其他高精度的测距设备,在此不做限制。
具体的,测距设备在测距时,计时设备也在同时计时;测量过程中图像采集设备一直在对测距设备及计时设备进行图像采集,并将该图像发送至上位机。因此上位机可以利用图像分析的方式确定第二时刻测距设备中显示的当前距离。
当前距离确定之后,根据当前距离确定移动节点的第二定位坐标y
作为一种可选的实施,根据当前距离确定移动节点的第二定位坐标,包括:
获取读卡分站对应的坐标;
基于当前距离及读卡分站对应的坐标确定移动节点的第二定位坐标。
这里,若读卡分站的坐标为原点,那么当前距离可等同为第二定位坐标;若读卡分站的坐标不是原点,那么第二定位坐标应为当前距离与读卡分站对应的坐标的总和。
举例来说,若当前距离为10m,读卡分站的坐标为原点,那么第二定位坐标为(10,0);若当前距离为10m,读卡分站的坐标为(5,0),那么第二定位坐标为(15,0)。
S213,基于所述第一定位坐标及所述第二定位坐标确定最大动态定位误差。
第一定位坐标及第二定位坐标确定出之后,根据第一定位坐标及第二定位坐标确定最大动态定位误差。
作为一种可选的实施例,基于第一定位坐标及第二定位坐标确定最大动态定位误差,包括:
根据公式
作为一种可选的实施例,基于第一定位坐标及第二定位坐标确定最大动态定位误差后,还包括:
基于预设的误差阈值判断最大动态定位误差是否满足定位精度的要求,以衡量煤矿井下人员定位系统的定位精度。
这样,即使当移动节点在经过测点的目标时刻,此时若没有到达读卡分站的定位周期,导致读卡分站没有读取移动节点的定位数据时,为了确保参与误差计算的第一定位坐标能与参与误差计算的移动节点所在的实际位置在时间上可一一准确对应,在确定第一定位坐标时,先找到与目标时刻最接近的第二时刻,然后在定位数据库获取第二时刻对应的定位数据(第一定位坐标);在确定移动节点所在的实际位置时(第二定位坐标),同样的也是获取的测距设备在第二时刻测得的当前距离,再根据当前距离确定第二定位坐标;这样,第一定位坐标和第二定位坐标均是第二时刻对应的坐标,因此可以确保参与误差计算的第一定位坐标能与参与误差计算的移动节点所在的实际位置在时间上可一一准确对应,进而可以准确确定出最大动态定位误差,最终能准确衡量出煤矿井下人员定位系统的定位精度。
基于同样的发明构思,本发明还提供了一种确定最大动态定位误差的系统,详见实施例二。
实施例二
本实施例提供一种确定最大动态定位误差的系统,如图1所示,系统包括:系统包括:读卡分站1、测距设备2、计时设备3、图像采集设备4、移动节点5及上位机6;其中,读卡分站1安装的有读卡设备,读卡分站1实质上为定位锚点。移动节点5为携带有标识卡的测试人员。
测距设备2安装在读卡分站1的正下方,计时设备3安装在测距设备2的一侧;测距设备2用于测量移动节点5的距离,计时设备3用于记录移动节点经过测点的时刻。测距设备2可以为激光测距仪,计时设备3可以为计时器,图像采集设备4可以为录像机或摄像头。
图像采集设备4用于采集测距设备2中的距离以及计时设备3的时间,图像采集设备4将采集到的距离数据及时间数据发送至上位机6中。为了确保确定精度,读卡分站1的时间与上位机6的时间保持同步。
具体的,上位机6,用于当移动节点5在测试时长内通过读卡分站1定位区域的测点时,获取移动节点5经过各测点的第一时刻;测点包括至少一个,所述移动节点包括至少一个;针对任一目标时刻,确定测试时长内与目标时刻最接近的第二时刻,在定位数据库中调取移动节点5在所述第二时刻的第一定位坐标;目标时刻为第一时刻中的任一时刻;
测距设备2,用于测量移动节点5在第二时刻的当前距离;当前距离为移动节点5与读卡分站1之间的距离;
上位机6还用于:获取当前距离,根据当前距离确定移动节点5的第二定位坐标;基于第一定位坐标及第二定位坐标确定最大动态定位误差。
这里,预先在读卡分站1的定位区域设定测点,测点包括至少一个。具体的,可以在读卡分站1附近,读卡分站1定位区域的边界以及读卡分站1定位区域的中间区域设定测点。其中,读卡分站1定位区域的边界为定位区域的最大覆盖半径所在的区域。
举例来说,以读卡分站1为中心,在距离读卡分站0~5m内设置测点;若定位区域的最大覆盖半径为200m,那么可以在100m附近设置测点。
测点设置完成后,然后移动节点5在测试时长内按照正常步行速度通过读卡分站1的定位区域,当移动节点5通过读卡分站1定位区域的测点时,获取移动节点5经过各测点的第一时刻;移动节点包括至少一个,移动节点为携带有标识卡的测试人员,标识卡可与读卡分站进行通信,读卡分站在预设的定位周期内可以读取标识卡的定位数据。比如,定位周期为2s,那么读卡分站会每间隔2s来获取标识卡的定位数据。
当移动节点5通过读卡分站1定位区域的测点时,计时设备3存储有各移动节点5经过各测点的第一时刻,测距设备2中存储有各移动节点5经过各测点时的距离信息,图像采集设备4在测试时长内采集计时设备中的第一时刻及距离信息,那么上位机6即可从图像采集设备4中获取移动节点5经过各测点的第一时刻T
举例来说,若h和i均为1时,那么获取的是第一个移动节点经过第一个测点时的第一时刻;若h和i均为2时,那么获取的是第二个移动节点经过第二个测点时的第一时刻;以此类推,即可获取到所有移动节点分别经过各测点的第一时刻。
这里,在实际应用中,可能会出现读卡分站1的定位周期与移动节点5经过测点的第一时刻不匹配的情况;也即当读卡分站1在定位周期内读取移动节点5的定位数据时,可能会出现移动节点5还未达到某一测点,或者移动已经离开了某一测点。这样,读卡分站1读取到的定位数据并不是移动节点在该测点的定位数据,导致后续确定最大动态定位误差时会降低确定精度。
那么为了提高最大动态定位误差的确定精度,本实施例中上位机6还用于:针对任一目标时刻,确定测试时长内与目标时刻最接近的第二时刻T
这里,读卡分站1在读取移动节点5的定位数据时,会实时将定位数据及对应的第二时刻存储至定位数据库中;那么定位数据库中包括有第二时刻和定位数据的映射关系。作为一种可选的实施例,上位机6具体用于:
基于第一时刻,在定位数据库中查找第一时刻对应的定位数据;
将定位数据转换为第一定位坐标。
因测距设备2也在一直测量移动节点的距离,因此在第二时刻,上位机6可以获取测距设备2在第二时刻测得的当前距离。
具体的,测距设备2在测距时,计时设备3也在同时计时;测量过程中图像采集设备4一直在对测距设备2及计时设备3进行图像采集,并将该图像发送至上位机6。因此上位机6可以利用图像分析的方式确定第二时刻测距设备2中显示的当前距离。
当前距离确定之后,上位机6用于根据当前距离确定移动节点的第二定位坐标y
作为一种可选的实施,上位机6根据当前距离确定移动节点的第二定位坐标,包括:
获取读卡分站1对应的坐标;
基于当前距离及读卡分站1对应的坐标确定移动节点的第二定位坐标。
这里,若读卡分站1的坐标为原点,那么当前距离可等同为第二定位坐标;若读卡分站1的坐标不是原点,那么第二定位坐标应为当前距离与读卡分站对应的坐标的总和。
举例来说,若当前距离为10m,读卡分站1的坐标为原点,那么第二定位坐标为(10,0);若当前距离为10m,读卡分站1的坐标为(5,0),那么第二定位坐标为(15,0)。
第一定位坐标及第二定位坐标确定出之后,根据第一定位坐标及第二定位坐标确定最大动态定位误差。
作为一种可选的实施例,上位机6基于第一定位坐标及第二定位坐标确定最大动态定位误差,包括:
根据公式
作为一种可选的实施例,基于第一定位坐标及第二定位坐标确定最大动态定位误差后,上位机6还用于:基于预设的误差阈值判断最大动态定位误差是否满足定位精度的要求,以衡量煤矿井下人员定位系统的定位精度。
这样,即使当移动节点在经过测点的目标时刻,此时若没有到达读卡分站的定位周期,导致读卡分站没有读取移动节点的定位数据时,为了确保参与误差计算的第一定位坐标能与参与误差计算的移动节点所在的实际位置在时间上可一一准确对应,在确定第一定位坐标时,先找到与目标时刻最接近的第二时刻,然后在定位数据库获取第二时刻对应的定位数据(第一定位坐标);在确定移动节点所在的实际位置时(第二定位坐标),同样的也是获取的测距设备在第二时刻测得的当前距离,再根据当前距离确定第二定位坐标;这样,第一定位坐标和第二定位坐标均是第二时刻对应的坐标,因此可以确保参与误差计算的第一定位坐标能与参与误差计算的移动节点所在的实际位置在时间上可一一准确对应,进而可以准确确定出最大动态定位误差,最终能准确衡量出煤矿井下人员定位系统的定位精度。
本发明实施例提供的一种确定最大动态定位误差的方法及系统能带来的有益效果至少是:
本发明提供了一种确定最大动态定位误差的方法及系统,方法包括:当移动节点在测试时长内通过读卡分站定位区域的测点时,获取所述移动节点经过各所述测点的第一时刻;所述测点包括至少一个,所述移动节点包括至少一个;针对任一目标时刻,确定测试时长内与所述目标时刻最接近的第二时刻,在定位数据库中调取所述移动节点在所述第二时刻的第一定位坐标;所述目标时刻为所述第一时刻中的任一时刻;获取测距设备在所述第二时刻测得的当前距离,根据所述当前距离确定所述移动节点的第二定位坐标;所述当前距离为所述移动节点与所述读卡分站之间的距离;基于所述第一定位坐标及所述第二定位坐标确定最大动态定位误差;如此,即使当移动节点在经过测点的目标时刻,此时若没有到达读卡分站的定位周期,导致读卡分站没有读取移动节点的定位数据时,为了确保参与误差计算的第一定位坐标能与参与误差计算的移动节点所在的实际位置在时间上可一一准确对应,在确定第一定位坐标时,先找到与目标时刻最接近的第二时刻,然后在定位数据库获取第二时刻对应的定位数据(第一定位坐标);在确定移动节点所在的实际位置时(第二定位坐标),同样的也是获取的测距设备在第二时刻测得的当前距离,再根据当前距离确定第二定位坐标;这样,第一定位坐标和第二定位坐标均是第二时刻对应的坐标,因此可以确保参与误差计算的第一定位坐标能与参与误差计算的移动节点所在的实际位置在时间上可一一准确对应,进而可以准确确定出最大动态定位误差,最终能准确衡量出煤矿井下人员定位系统的定位精度。
以上所述,仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种确定最大动态定位误差的方法及系统
- 一种确定电网系统的最大送电规模的方法和系统