一种多旋翼全向飞行器及其控制方法
文献发布时间:2023-06-19 10:40:10
技术领域
本发明涉及飞行器技术领域,具体涉及一种多旋翼全向飞行器及其控制方法。
背景技术
当前随着无人机技术的逐步成熟,无人机可应用的领域及市场也越来越广阔。伴随着应用发展,相应的技术要求也日益增多,面对更加复杂的空间环境及更大的灵活性需求,逐渐诞生了一种全向飞行器,其基础是采用多轴多旋翼飞行器,进一步设计各旋翼轴不全共平面,进而增加了飞行器整体机动性能,可以在空中做出更多大机动动作。现有的旋翼式全向飞行器均采用了单轴单一电动航空马达(如空心杯电机)进行控制,原理在于由电机控制可以减少部附件数量,也可以实现单轴转速调控,从而改变桨叶产生的升力。但是该种设计由于采用了电池为储能单元,并不能很好的满足续航需求,且电动机的功率也限制了整体飞行能力,抗风等级不足。
专利201721888513.6公开了一种非平面式八旋翼全向飞行器。包括机身、一端安装在机身上的八根支撑臂、分别设置在支撑臂中部的八个转子,八根支撑臂的另一端空间位置位于一以机身为中心的正方体的顶点。上述技术方案具体采用了可逆电机驱动旋翼,虽然电机转向可变,但是旋翼的转向是不能改变的,因为旋翼的翼型是前缘厚,后缘薄,旋翼转向将提供不了升力。所以上述技术方案也无法实现全姿态飞行,只能通过靠上的四个旋翼提供向上的拉力,靠下的四个旋翼提供向上的推力来实现飞行。一旦无人机上下颠倒过来,原本靠下的四个旋翼无法从推力状态切换成拉力状态。原本靠上的四个旋翼也无法从拉力状态切换成推力状态。进一步结合前述内容,该方案还需要8个电机和电池,且旋翼提供的拉力的方向与重力方向有较大的夹角,加上上下的旋翼间气流的干扰,整体续航难以保证。
发明内容
本发明所要解决的技术问题是:需要提供一种长续航且机动性能更好的多旋翼全向飞行器。
本发明解决技术问题所采取的技术方案是:
一种多旋翼全向飞行器,包括:发动机、传动系统、旋翼系统、飞控系统;所述飞控系统控制所述发动机启停及输出功率大小;所述发动机通过所述传动系统驱动所述旋翼系统;
所述旋翼系统包括多个非共平面设置的旋翼轴;每根旋翼轴对应设置有至少两片桨叶;所述桨叶通过桨毂与所述旋翼轴连接,所述桨叶与所述旋翼轴之间还设置有变距机构;所述旋翼系统的旋翼轴共分为两组,且对称分布于所述发动机的上方和下方;
所述发动机为燃油发动机或油电混合发动机其中一种;所述发动机安装于飞行器中部位置;
所述传动系统包括主传动轴、传动机构;所述传动机构共设有两组,分别位于所述发动机的上方和下方;所述发动机的输出端转动连接所述主传动轴,所述主传动轴的两端分别连接两组所述传动机构,所述传动机构连接并驱动对应的所述旋翼轴;所述旋翼轴转动方向不全相同;
所述飞控系统与所述变距机构电连;
所述多旋翼全向飞行器还包括多根撑杆,各撑杆的末端不全为共平面设置。
进一步,所述桨毂为柔性桨毂,中心处与所述旋翼轴固定连接;所述桨毂末端通过对称设置的上、下夹板与所述桨叶固定连接,并通过弹性变形实现桨距变化。
更进一步,所述变距机构包括:变距摇臂、变距拉杆、旋转环、不旋转环、舵机;
所述上、下夹板的根部固定安装有所述变距摇臂;所述变距摇臂末端铰接有所述变距拉杆的一端,所述变距拉杆的另一端铰接于所述旋转环上;所述旋转环与所述不旋转环转动连接,且套装于所述旋翼轴上;所述不旋转环通过拉杆与所述舵机的摇臂连接。
更进一步,所述旋翼轴外部套装有轴套,所述轴套一端固定安装于所述多旋翼全向飞行器的主体上,另一端固定安装有所述舵机。
更进一步,所述多旋翼全向飞行器的主体包括第一隔板、第二隔板、第一盖板、第二盖板;
所述发动机固定安装于所述第一隔板与所述第二隔板之间;所述第一隔板与所述第二隔板之间还垂直设置有所述主传动轴,所述发动机的输出端通过齿轮组转动连接所述主传动轴;所述主传动轴上下两端分别穿过所述第一隔板、第二隔板;所述第一隔板、第二隔板外表面分别安装有所述传动机构;
所述第一盖板安装于所述第一隔板远离所述发动机的一侧,所述第二盖板安装于所述第二隔板远离所述发动机的一侧;
所述第一盖板、第二盖板为锥形圆台结构、锥形棱台结构或球冠结构其中一种;两组旋翼轴分别安装于所述第一盖板和所述第二盖板的周侧面。
更进一步,所述传动机构为齿轮组,包括主动齿轮、第一从动齿轮、换向齿轮、第二从动齿轮;
所述主动齿轮固定套装于所述主传动轴上,外圈沿周向啮合有多个第一从动齿轮和多个换向齿轮,且所述换向齿轮与所述从动齿轮交替分布;每个换向齿轮在远离所述主动齿轮一侧均设有一个所述第二从动齿轮,并互相啮合;每个第一从动齿轮、第二从动齿轮均连接一个所述旋翼轴。
更进一步,所述主动齿轮、第一从动齿轮、换向齿轮、第二从动齿轮均为圆柱齿轮;所述第一从动齿轮、第二从动齿轮通过万向节连接对应的旋翼轴。
进一步,还包括外壳,所述外壳呈椭球状,所述撑杆末端与所述外壳可拆卸连接;所述外壳表面对应各桨盘位置处设有通孔,所述通孔直径大于桨盘直径;所述外壳表面还设置有多个减重孔。
另一方面,本发明还根据前述的多旋翼全向飞行器,提供一种对应的控制方法,飞行方向控制方法为:
所述多旋翼全向飞行器共有m个旋翼轴;所有旋翼轴转速相同且每个旋翼轴的桨叶通过对应的变距机构改变迎角,来改变所述旋翼轴的拉力和扭矩;
在任意姿态情况下均可找到n个与重力方向成钝角的旋翼轴,控制这n个旋翼轴对应的桨叶迎角通过变距机构变距为正迎角,提供拉力;并将另外(m-n)个旋翼轴对应的桨叶迎角通过变距机构变距为负迎角,提供推力;使所述多旋翼全向飞行器的合力沿重力方向分力与重力相等,另一分力方向与设定运动方向相同;
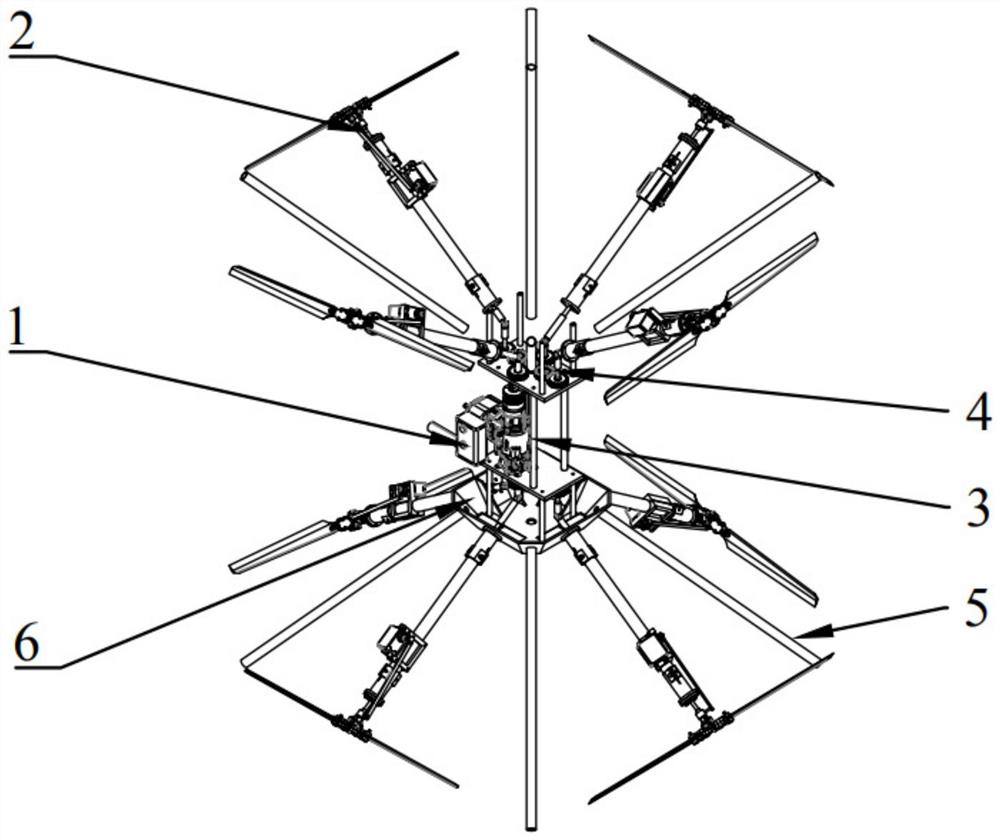
其中,n 进一步,绕轴转动的控制方法为: S1、建立一个垂直于所绕轴的平面,将各旋翼轴对应的桨盘投影于所述平面上; S2、选取桨盘旋转方向与设定绕轴方向相同的旋翼轴进行标记; S3、调大所述S2中标记的旋翼轴对应的桨叶迎角,调小其他旋翼轴对应的桨叶迎角,保持所述多旋翼全向飞行器的合外力方向及大小不变,改变所绕轴的扭矩,完成绕轴转动。 本发明具有如下优点: 本发明通过选取油动发动机,并设置了合理的传动及变距机构,实现了全向飞行器高机动、长续航的能力,同时依靠增设的变距机构更进一步提升了机动性能,整体装置更加简单合理。 附图说明 为了更清楚地说明本发明实施例,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅是本发明的一个或几个实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。 附图中体现的相同结构分布位置及分布数量仅是为了便于描述本发明,而不是指示或暗示所指的结构必须具有特定的方位、分布数量,因此不能理解为对本发明的限制。 图1为本发明具体实施例中内部结构示意图; 图2为本发明具体实施例中旋翼轴及组件结构示意图; 图3为本发明具体实施例中传动系统结构示意图; 图4为本发明具体实施例中主体下部放大示意图; 图5为本发明具体实施例中安装外壳结构示意图; 图6为本发明具体实施例中建立坐标系及标记示意图。 图中: 1-发动机;2-旋翼轴;3-主传动轴;4-传动机构;5-撑杆;6-主体;7-外壳;201-轴套;202-舵机;203-拉杆;204-不旋转环;205-旋转环;206-变距拉杆;207-变距摇臂;208-夹板;209-桨叶;401-主动齿轮;402-第一从动齿轮;403-第二从动齿轮;404-换向齿轮;405-万向节;601-第一隔板;602-第二隔板;603-立柱;604-第二盖板;701-通孔;702-减重孔;2081-上夹板;2082-下夹板。 具体实施方式 下面结合具体附图1-5对本发明具体实施例进行说明。 一种多旋翼全向飞行器,包括:发动机1、传动系统、旋翼系统、飞控系统;飞控系统控制发动机启停及输出功率大小;发动机1通过传动系统驱动旋翼系统; 如图1所示,本实施例中以8轴系统进行说明,其中旋翼系统包括8个非共平面设置的旋翼轴2。结合图2所示,每根旋翼轴2对应设置有两片桨叶209;桨叶209通过桨毂与旋翼轴2连接,桨叶209与旋翼轴2之间还设置有变距机构;优选地,桨毂为柔性桨毂,中心处与旋翼轴2固定连接;桨毂两侧末端通过对称设置的上夹板2081和下夹板2082与桨叶209固定连接,并通过末端弹性变形实现桨距变化。其中,变距机构包括:变距摇臂207、变距拉杆206、旋转环205、不旋转环204、舵机202;夹板208的根部固定安装有变距摇臂207;变距摇臂207末端铰接有变距拉杆206的一端,变距拉杆206的另一端铰接于旋转环205上;旋转环205与不旋转环204转动连接,且套装于旋翼轴2上;不旋转环204通过拉杆203与舵机202的摇臂连接。旋翼轴2外部套装有轴套201,轴套201一端固定安装于多旋翼全向飞行器的主体上,另一端固定安装有舵机202。上述设计的目的在于,保持旋翼轴2转速恒定的情况下,通过调整舵机202,使其摇臂转动带动拉杆203,进而拉动不旋转环204在旋翼轴2上沿轴向移动,使旋转环205也发生轴向移动,随着带动变距拉杆206、变距摇臂207沿轴向移动,扭转夹板208角度来改变桨叶209的迎角。 旋翼系统的旋翼轴2共分为两组,每组4跟且对称分布于整体的上方和下方。每组中各轴沿周向等距分布,且均为斜向设置,具体如图1所示,保持8根轴的延长线交于一点。 发动机1为燃油发动机,为了更好的驱动传动系统,将发动机1安装于飞行器中部位置。 结合图3所示,传动系统包括主传动轴3、传动机构4;传动机构4共设有两组,分别位于发动机1的上方和下方;发动机1的输出端转动连接主传动轴3,主传动轴3的两端分别连接两组传动机构4,传动机构4连接并驱动对应的旋翼轴2;旋翼轴2转动方向不全相同;优选地,多旋翼全向飞行器的主体6包括第一隔板601、第二隔板602、第一盖板、第二盖板604; 发动机1固定安装于第一隔板601与第二隔板602之间;第一隔板601与第二隔板602之间还垂直设置有主传动轴3,发动机1的输出端通过齿轮组转动连接主传动轴3;主传动轴3上下两端分别穿过第一隔板601、第二隔板602;第一隔板601、第二隔板602外表面分别安装有传动机构4;第一隔板601和第二隔板602之间通过多个立柱603固定连接。 结合图1、4所示,第一盖板(图中未显示)安装于第一隔板601远离发动机的一侧,第二盖板604安装于第二隔板602远离发动机1的一侧;第一盖板通过多根支柱与第一隔板601固定连接;第二盖板604通过多根支柱与第二隔板602固定连接。 第一盖板、第二盖板604均为锥形棱台结构,这样旋翼轴2的轴套201便于安装于盖板的周侧面上,同时,多旋翼全向飞行器还包括多根撑杆5,各撑杆5的末端不全为共平面设置,末端位于桨叶209活动范围以外,各撑杆5也可安装于盖板的周侧面上。 优选地,如图3所示,传动机构4为齿轮组,上下两组传动机构为对称设置。主要包括主动齿轮401、第一从动齿轮402、换向齿轮404、第二从动齿轮403; 主动齿轮401固定套装于主传动轴3上,外圈沿周向啮合有2个第一从动齿轮402和2个换向齿轮404,且换向齿轮404与第一从动齿轮402交替分布。每个换向齿轮404在远离主动齿轮401一侧均设有一个第二从动齿轮403,并互相啮合。每个第一从动齿轮402、第二从动齿轮403均连接一个旋翼轴2。通过换向设计,使相邻的两旋翼轴2转动方向相反,平衡了整体扭矩。 优选地,为了减少成本及加工工艺,可不选用锥齿轮设计,将主动齿轮401、第一从动齿轮402、换向齿轮404、第二从动齿轮403选为圆柱齿轮;第一从动齿轮402、第二从动齿轮403通过万向节405连接对应的旋翼轴2。这样可以降低传动部件成本,降低对组装精度要求。 飞控系统与变距机构电连,从而可以在不改变单根轴转速的情况下,通过调整桨叶209的迎角来改变单根旋翼轴2的桨距。 优选地,如图5所示,另一种具体实施例中,撑杆5不再作为起落架使用,整体外部还包括外壳7,外壳7呈椭球状,撑杆5末端与外壳7可拆卸连接;外壳7表面对应各桨盘位置处设有通孔701,通孔701直径大于桨盘直径;外壳表面还设置有多个减重孔702。这样一方面保持气流畅通,还可以保护桨叶,避免直接与外物碰撞,提升整体安全性。 基于上述实施例,提供一种多旋翼全向飞行器的控制方法,飞行方向控制方法为: 多旋翼全向飞行器共有8(即m=8)个旋翼轴;所有旋翼轴转速相同且每个旋翼轴的桨叶通过对应的舵机改变迎角,来改变旋翼轴的拉力和扭矩; 该8旋翼的在任意姿态均可找到方向与重力方向成钝角的4(即n=4)个旋翼,这4个旋翼的迎角通过舵机变距为正迎角,提供拉力,另外4个旋翼的迎角通过舵机变距为负迎角,提供推力。 进一步,如图6所示,建立无人机机体坐标系,给各个旋翼编号为a~h。将提供拉力的4个旋翼分为一组,提供推力的另外4个旋翼分为另一组。 旋翼a、旋翼c、旋翼f、旋翼h始终顺时针转动(正视桨盘方向),旋翼b、旋翼d、旋翼e、旋翼g始终逆时针转动(正视桨盘方向)。且所有轴转速相同。每个旋翼通过单独的舵机改变旋翼的迎角来改变旋翼的拉力系数和扭矩系数,单旋翼增大迎角时,拉力系数和扭矩系数随之增大。 在无人机飞行中,无人机的运动是由6个自由度方向的运动组合而成。 当机体坐标系的Z轴与重力方向重合时的悬停控制方法:使旋翼迎角 向Z轴正方向运动控制方法:等量增大所有旋翼迎角,使拉力和推力增大,同时扭矩也能保持平衡。 向X轴正方向运动控制方法:等量增大旋翼a和旋翼g的迎角 向Y轴方向运动与向X轴方向运动同理。 优选地,针对绕轴飞行的控制方法为: S1、建立一个垂直于所绕轴的平面,将各旋翼轴对应的桨盘投影于平面上; S2、选取桨盘旋转方向与设定绕轴方向相同的旋翼轴进行标记; S3、调大S2中标记的旋翼轴对应的桨叶迎角,调小其他旋翼轴对应的桨叶迎角,保持多旋翼全向飞行器的合外力方向及大小不便,改变所绕轴的扭矩,完成绕轴转动。 具体以绕图6中X\Y\Z三轴方法进行举例说明。 Y轴顺时针旋转的控制方法为例:增大旋翼c和旋翼e的迎角 绕X轴与绕Y轴同理。 绕Z轴顺时针旋转的控制方法:等量增大旋翼a和旋翼c的迎角 其中, 以上具体实施方式仅用以说明本发明的技术方案而非限制,尽管参照实例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
- 一种多旋翼全向飞行器及其控制方法
- 一种可倾转多旋翼飞行器的全向控制方法