防止感性负载驱动电路被反电动势损坏的装置和方法
文献发布时间:2023-06-19 10:40:10
技术领域
本发明涉及电子电路,尤其涉及一种防止感性负载驱动电路被反电动势损坏的装置和方法。
背景技术
常见的感性负载包括继电器。继电器由于驱动部分是个具有大感量的线圈,而动作时往往都是短时脉冲,这样,在继电器动作后线圈的电感中便储存了能量,当继电器动作完成,撤去供电电源的时候,储存在线圈中的能量没有适当地释放通路,就会以反向电压的方式对芯片发生电流回灌,因为阻抗很高,所以产生的反向电动势会很高,往往就会超过芯片的设计承载能力从而使芯片损坏。
由于继电器反电动势的存在,因此需要建立一个能量释放的通路,传统继电器由于驱动是单相的,因此在控制端并联一个反向的二极管即可,当反向电动势产生的时候就会通过该二极管将能量释放,如图1中D1所示。
磁保持继电器由于没有维持电流,所以在能耗上比传统继电器有很大优势,但磁保持继电器的开合是由控制电路的给的不同方向的电流脉冲实现的,因此其驱动电路不再是简单的上下电。现有磁保持继电器由于需要双向驱动线圈,因此通常采用H桥式电路进行驱动控制,如图2所示。现有的H桥式电路所在驱动电路的两个输入INA和INB与两个输出OUTA和OUTB的逻辑对应关系通常如图3所示。其中,图3中输出为高阻的状态对应H桥式电路中的4个开关均为关闭状态,此时磁保持继电器关断;图3中两个输出端口OUTA和OUTB输出为“10”和“01”时的状态对应H桥式电路中同一侧的两个开关导通,另一侧的两个开关管关闭的状态,此时磁保持继电器开启。然而由于控制端电平正负交替,即OUTA和OUTB输出“01”、“10”交替,因此现有磁保持继电器的驱动电路无法采用并联二极管的方式来防止被反电动势损坏。
发明内容
发明目的:为了有效地解决反电动势对芯片的伤害的问题,本发明提供一种防止感性负载驱动电路被反电动势损坏的装置和方法。
技术方案:一方面,本发明公开了一种防止感性负载驱动电路被反电动势损坏的装置。该装置包括逻辑控制模块和H桥驱动模块;所述H桥驱动单元包括四个开关模块;第一开关模块的第一端和第三开关模块的第一端均连接至电源;第一开关模块的第二端、负载的第一端和第二开关模块的第一端连接于第一节点;第三开关模块的第二端、负载的第二端和第四开关模块的第一端连接于第二节点;第二开关模块的第二端和第四开关模块的第二端均接地;所述第一节点和所述第二节点分别与感性负载的两个输入端口连接;所述逻辑控制模块包括两个输入端口和四个输出端口;所述四个输出端口分别与所述四个开关模块的控制端相连;所述H桥驱动模块在所述逻辑控制模块的控制下能够具有三种状态:状态一:四个开关模块全部关断;状态二:第一开关模块和第二开关模块导通且第三开关模块和第四开关模块关断;或者第一开关模块和第二开关模块关断且第三开关模块和第四开关模块导通;状态三:第二开关模块和第四开关模块导通且第一开关模块和第三开关模块关断。
进一步地,四个开关模块中的每一者均包括一个MOS管和一个二极管;每一MOS管的源极和漏极分别与对应二极管的正极和负极电连接,每一MOS管的栅极引出作为对应开关模块的控制端。
进一步地,所述逻辑控制模块包括选择器电路。
进一步地,所述第二开关模块的第二端和所述第四开关模块的第二端均经由串联的限流电阻接地。
进一步地,所述感性负载包括磁保持继电器。
进一步地,所述H桥驱动单元中的四个开关模块均响应于低电平而导通;且:当所述逻辑控制模块的第一输入端口和第二输入端口均接收到低电平时,所述逻辑控制模块中第二输出端口和第四输出端口输出低电平,第一输出端口和第三输出端口输出高电平;当所述逻辑控制模块的第一输入端口接收到低电平且第二输入端口接收到高电平时,所述逻辑控制模块中第一输出端口和第二输出端口输出高电平,第三输出端口和第四输出端口输出低电平;当所述逻辑控制模块的第一输入端口接收到高电平且第二输入端口接收到低电平时,所述逻辑控制模块中第一输出端口和第二输出端口输出低电平,第三输出端口和第四输出端口输出高电平;当所述逻辑控制模块的第一输入端口和第二输入端口均接收到高电平时,所述逻辑控制模块的四个输出端口均输出高电平。
进一步地,上述装置还包括第一信号稳定模块和第二信号稳定模块;第一外部输入信号经由第一信号稳定模块连接至所述逻辑控制单元的第一输入端口;第二外部输入信号经由第二信号稳定模块连接至所述逻辑控制模块的第二输入端口;第一和第二信号稳定单元各自包括一个二极管、电阻和反相器;各信号稳定模块中,二极管的负极、电阻的一端和反相器的一端均与对应的外部输入信号相连,二极管的正极和电阻的另一端均接地,反相器的另一端与所述逻辑控制模块的对应输入端口相连。
另一方面,本发明公开了一种利用上述装置来防止感性负载驱动电路被反电动势损坏的方法。该方法包括:当需要使所述H桥驱动单元从状态二向状态一转变时,对所述逻辑控制模块的所述第一输入端口和所述第二输入端口的电平进行控制,使得所述H桥驱动单元先从状态二变为状态三,再从状态三变为状态一。具体包括:使所述逻辑控制模块的第一输入端口和第二输入端口的输入电平从“高电平-低电平”或“低电平-高电平”组合变为“低电平-低电平”组合,再从“低电平-低电平”组合变为“高电平-高电平”组合。
进一步地,该方法还包括当需要使所述H桥驱动单元从状态二向状态一转变时,所述H桥驱动单元处于状态三的时间为10~100us。
有益效果:本发明与现有技术相比,其优点为:
(1)通过改进的驱动方式,配合适当的输入控制达到在驱动继电器的过程中将反激电动势泄放,达到保护控制芯片及主电路,保证设备按照预计的逻辑正常运转;
(2)提高芯片的极限驱动能力,提高系统的可靠性,降低保护电路成本。
附图说明
图1为普通继电器驱动电路及保护二极管的接法示意图;
图2为现有磁保持继电器反电动势泄放原理图;
图3为现有磁保持继电器反电动势泄放保护驱动输入逻辑示意图;
图4为本发明的一个实施例中磁保持继电器反电动势泄放保护驱动输入逻辑示意图;
图5为本发明的一个实施例中输入信号时序示意图;
图6为本发明的一个实施例的电路结构示意图。
具体实施方式
以下是结合附图对本发明进行详细说明。
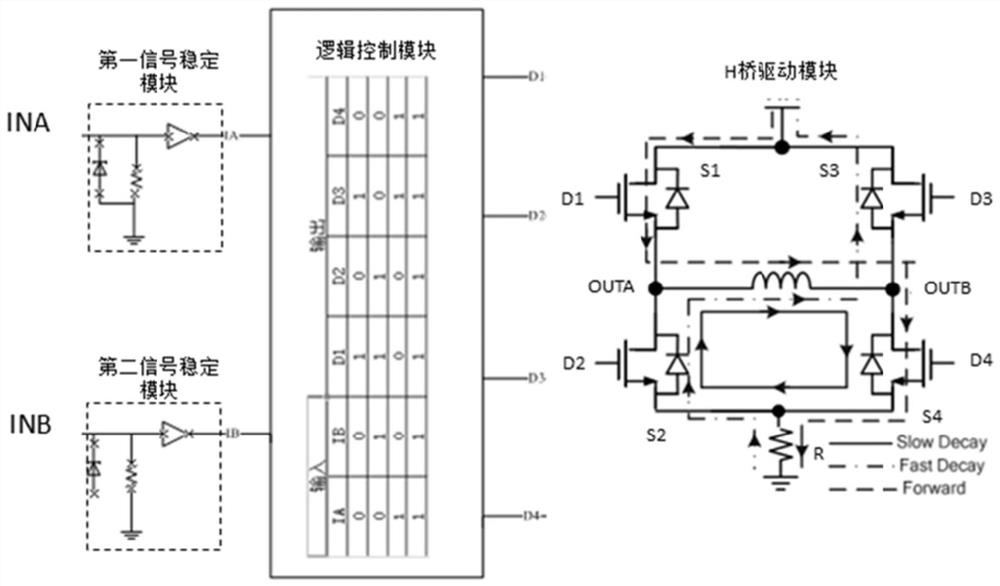
如图6,本实施例中的防止感性负载驱动芯片被反电动势损坏的装置,包括逻辑控制模块和H桥驱动模块。
H桥驱动单元包括四个开关模块。第一开关模块S1的第一端和第三开关模块S3的第一端均连接至电源;第一开关模块S1的第二端、负载的第一端和第二开关模块S2的第一端连接于第一节点OA;第三开关模块S3的第二端、负载的第二端和第四开关模块S4的第一端连接于第二节点OB;第二开关模块S2的第二端和第四开关模块S4的第二端优选地均经由限流电阻R接地;第一节点OA和第二节点OB分别与负载的两个输入端口连接。在其他实施例中,限流电阻R也可以视具体情况而省略。
上述负载通常为感性负载,例如磁保持继电器等。四个开关模块S1~S4中的每一者均包括一个MOS管和一个二极管。每一MOS管的源极和漏极分别与对应二极管的正极和负极电连接,每一MOS管的栅极引出作为对应开关模块的控制端。
逻辑控制模块包括两个输入端口1A和1B以及四个输出端口D1~D4。四个输出端口D1~D4分别与四个开关模块S1~S4的控制端一一对应且相连。
如图6,当逻辑控制模块的第一输入端口1A和第二输入端口1B均接收到高电平(对应逻辑“1”)时,四个输出端口D1~D4均输出高电平。相应地,H桥驱动单元的四个开关模块S1~S4均为关断状态,此时H桥驱动单元对应状态一,第一节点OA和第二节点OB均输出低电平,磁保持继电器关闭。此时H桥驱动单元对应状态一。
当逻辑控制模块的第一输入端口1A接收到高电平且第二输入端口1B接收到低电平(对应逻辑“0”)时,第一输出端口D1和第二输出端口D2均输出低电平,第三输出端口D3和第四输出端口D4均输出高电平。相应地,H桥驱动单元的第一开关模块S1和第二开关模块S2导通,第三开关模块S3和第四开关模块S4关断,第一节点OA输出高电平,第二节点OB输出低电平,磁保持继电器得到正向输入电压。当逻辑控制模块的第一输入端口1A接收到低电平且第二输入端口1B接收到高电平时,第一输出端口D1和第二输出端口D2均输出高电平,第三输出端口D3和第四输出端口D4均输出低电平。相应地,H桥驱动单元的第一开关模块S1和第二开关模块S2关断,第三开关模块S3和第四开关模块S4导通,第一节点OA输出低电平,第二节点OB输出高电平,磁保持继电器得到反向输入电压。这两种情况下,H桥驱动单元对应状态二。
当逻辑控制模块的第一输入端口1A和第二输入端口1B均接收到低电平时,第一输出端口D1和第三输出端口D3输出高电平,第二输出端口D2和第四输出端口D4输出低电平。相应地,H桥驱动单元的第一开关模块S1和第三开关模块S3关断,第二开关模块S2和第四开关模块S4关断,第一节点OA输出高电平,第二节点OB输出高电平,磁保持继电器通过第二开关模块和第四开关模块形成的回路泄放反电动势。此时H桥驱动单元对应状态三。
上述逻辑控制模块可以采用选择器电路来实现。由于选择器电路内具体的电路器件结构和连接关系可以根据选择器电路输入输出的设计需求通过现有设计软件实现,且实现方式多种多样,在此不做具体的限定,只需要选择器的输入输出满足先前叙述过逻辑对应关系即可。而根据现有的输入输出逻辑对应关系设计选择器电路为现有技术。
之前已经提及,反电动势发生在继电器动作完成,撤去供电电源的时候,即当逻辑控制单元的两个输入端口的逻辑电平由“10”或“01”变成“11”的时候(对应H桥驱动单元由状态二向状态一转变)。此时感性负载线圈中的能量没有适当的释放通路,就会以反向电压的方式对H桥驱动单元发生电流回灌。
为了防止上述现象发生,当需要使H桥驱动单元从状态二向状态一转变时,可以对逻辑控制模块的第一输入端口1A和第二输入端口1B的电平进行控制,使得H桥驱动单元先从状态二变为状态三,再从状态三变为状态二。图5示出了切换过程中逻辑控制模块的两个输入端口输入信号的一种状态,其中第一输入端口1A输入的信号在由高电平“1”变为低电平“0”的前一刻,第二输入端口1B输入的信号忽然由“0”变成“1”,再由“1”变成“0”,这也就使得H桥驱动单元先从状态二变为状态三,再从状态三变为状态一。由于H桥驱动单元在状态三下第二开关单元S2和第四开关单元S4均为导通状态,且第一开关单元S1和第三开关单元S3均为关断状态,此时感性负载线圈向H桥驱动单元回灌的电流能够在第二开关单元S2和第四开关单元S4形成的回路中释放,而不会损坏开关单元内的器件,从而也就达到了防止感性负载驱动电路被反电动势损坏的目的。
通常继电器触点动作时间为20ms左右,为了保证感性负载可靠动作,一般提供给逻辑控制单元的启用信号都会至少保持30ms以上的脉冲,泄放周期(即逻辑控制模块的第一输入端口1A和第二输入端口1B的输入信号为“00”的情况)仅需要10~100us。
为了保证输入到逻辑控制模块的两个输入端口的信号稳定性,上述装置还包括第一信号稳定单元和第二信号稳定模块。其中,第一外部输入信号INA经由第一信号稳定单元连接至逻辑控制单元的第一输入端口1A;第二外部输入信号INB经由第二信号稳定单元连接至逻辑控制单元的第二输入端口1B。第一和第二信号稳定单元各自包括一个二极管、电阻和反相器。各信号稳定单元中,二极管的负极、电阻的一端和反相器的一端均与对应的外部输入信号相连,二极管的正极和电阻的另一端均接地,反相器的另一端与所述逻辑控制单元的对应输入端口相连。由于各信号稳定单元中反相器的存在,两个外部输入信号INA和INB与整个装置的两个输出端(整个装置的两个输出端分别从第一节点OA和第二节点OB引出)的两个输出信号OUTA和OUTB的对应关系如图4所示。与图3中的现有技术相比,本实施例中当INA和INB为高电平时,OUTA和OUTB均为低电平,而现有技术中则为高阻状态。
需要说明的是,图6中逻辑控制模块中的输入端口和输出端口的逻辑电平对应关系仅仅是示例性的,其他实施例中可以对其进行调整,只要保证H桥驱动电路具有上述三种状态就行。
- 防止感性负载驱动电路被反电动势损坏的装置和方法
- 防止感性负载驱动电路被反电动势损坏的装置