一种基于阿基米德螺线微通道无阀压电泵的MEMS流体陀螺
文献发布时间:2023-06-19 10:41:48
技术领域
本发明涉及领域一种陀螺,特别是涉及一种基于阿基米德螺线微通道无阀压电泵的MEMS流体陀螺。
背景技术
陀螺技术最早是用于航海导航,但随着科学技术的发展,它在航空和航天事业中也得到广泛的应用。陀螺仪器不仅可以作为指示仪表,而更重要的是它可以作为自动控制系统中的一个敏感元件,即可作为信号传感器。根据需要,陀螺仪器能提供准确的方位、水平、位置、速度和加速度等信号,以便驾驶员或用自动导航仪来控制飞机、舰船或航天飞机等航行体按一定的航线飞行,而在导弹、卫星运载器或空间探测火箭等航行体的制导中,则直接利用这些信号完成航行体的姿态控制和轨道控制。由此可见,陀螺仪器的应用范围是相当广泛的,它在现代化的国防建设和国民经济建设中均占重要的地位。
但是目前市场上的陀螺价格昂贵,体积庞大,占用载体的空间和质量都大,机构比较复杂,不适用于在一些产品应用,而小型化简单的液体陀螺(如基于多种压电泵的陀螺)需要精加工制备,尺寸仍然较大,而且封装复杂。虽然市场上也有MEMS陀螺,但基本上都是固态振动式的,而且需要进行硅工艺的刻蚀等比较复杂的微电子工艺,其性能依赖于结构设计以及硅刻蚀技术的成熟度。
因此,发明人提供了一种基于阿基米德螺线微通道无阀压电泵的MEMS流体陀螺。
发明内容
(1)要解决的技术问题
本发明实施例提供了一种基于阿基米德螺线微通道无阀压电泵的MEMS流体陀螺,通过利用MEMS工艺在无阀压电泵的泵体上制备平面阿基米德螺线微流控通道以及采用MEMS工艺制备压电振子,使得该MEMS流体陀螺结构简单,成本低廉,尺寸较小,适用范围广。
(2)技术方案
第一方面,本发明的实施例提出了一种基于阿基米德螺线微通道无阀压电泵的MEMS流体陀螺,包括相互贴合的上盖和下盖,所述上盖与所述下盖之间设有微腔,所述微腔内的容纳有第一压电振子,还包括采用MEMS工艺成型于所述上盖或所述下盖上的第一平面阿基米德螺线微通道,所述上盖或所述下盖上还设有第一连通微通道,所述第一平面阿基米德螺线微通道的两端分别连接有所述微腔和流体进口,所述流体进口的另一端连接有第一微流管,所述第一连通微通道的两端分别连接所述微腔和流体出口,所述流体出口的另一端连接有第二微流管,所述流体进口与所述流体出口均设于所述上盖或所述下盖上,所述第一微流管与所述第二微流管远离所述流体进口的一端均设置有压电单元,所述压电单元通过导线与用于测量所述压电单元的电荷变化量的传感器单元连接。
进一步地,所述压电单元包括第二压电振子或第三压电振子,所述第一微流管远离所述流体进口的一端连接所述第二压电振子,所述第二微流管远离所述流体出口的一端连接所述第三压电振子,所述传感器单元包括第一传感器或第二传感器,所述第二压电振子通过所述导线与所述第一传感器连接;所述第三压电振子通过所述导线与所述第二传感器连接。
进一步地,所述压电单元还包括用于固定所述第二压电振子或第三压电振子于第一微流管或第二微流管上的压电振子固定件。
进一步地,所述第一平面阿基米德螺线微通道与所述微腔之间设有第二连通微通道,所述第二连通微通道的两端分别与所述第一平面阿基米德螺线微通道与所述微腔连通。
进一步地,所述上盖或所述下盖上设有通过MEMS工艺成型在所述上盖或所述下盖上的第二平面阿基米德螺线微通道,所述第二平面阿基米德螺线微通道的两端分别与所述第一连通微通道和所述流体出口连通。
进一步地,所述第一平面阿基米德螺线微通道为以所述流体进口为中心和起点逆时针方向设置的阿基米德螺线微通道,所述第二平面阿基米德螺线微通道为以所述流体出口为中心和起点顺时针方向设置的阿基米德螺线微通道,所述第一平面阿基米德螺线微通道与所述第二平面阿基米德螺线微通道对称布置与所述上盖或所述下盖上,所述流体进口和所述流体出口以对称布置在所述微腔的中心线的两侧。
进一步地,所述上盖或所述下盖均由PDMS材料浇筑一体成型,所述第一平面阿基米德螺旋微通道为将PDMS材料浇筑在具有与所述第一平面阿基米德螺线微通道相同形状的凸模固化后成型,所述凸模由SU-8光刻负胶图形化出。
进一步地,所述下盖上设有第一凹槽,所述上盖上的第二凹槽,所述第一凹槽与所述第二凹槽密封配合形成所述微腔,所述第一压电振子容纳在所述第二凹槽内,所述第二凹槽呈阶梯状设置。
进一步地,所述微腔通过MEMS工艺成型于所述下盖上,且所述微腔的截面呈圆形。
进一步地,所述第一压电振子、所述第二压电振子与所述第三压电振子具有相同的结构,所述第一压电振子包括衬底以及溅射成型于所述衬底上的导电层,所述导电层包含金属层与压电功能材料层,所述压电功能材料层嵌入至所述衬底内,所述金属层位于所述压电功能材料层的上方,所述衬底由硅材料制成,所述压电功能材料层由无机压电材料制成。
(3)有益效果
综上,本发明通过利用MEMS工艺(微纳加工技术)在无阀压电泵的泵体上制备平面阿基米德螺线微流控通道以及采用MEMS工艺制备压电振子,使得该MEMS流体陀螺结构简单,成本低廉,尺寸较小,适用范围广,易于实现和大规模量产。对于转动的安全性具有很好的敏感度,可以大量运用在载具的侧翻姿态控制上;具有泵的结构的有点,易于微小型化、耗能低、响应快、无电磁干扰。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对本发明实施例中所需要使用的附图作简单地介绍,显而易见地,下面所描述的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
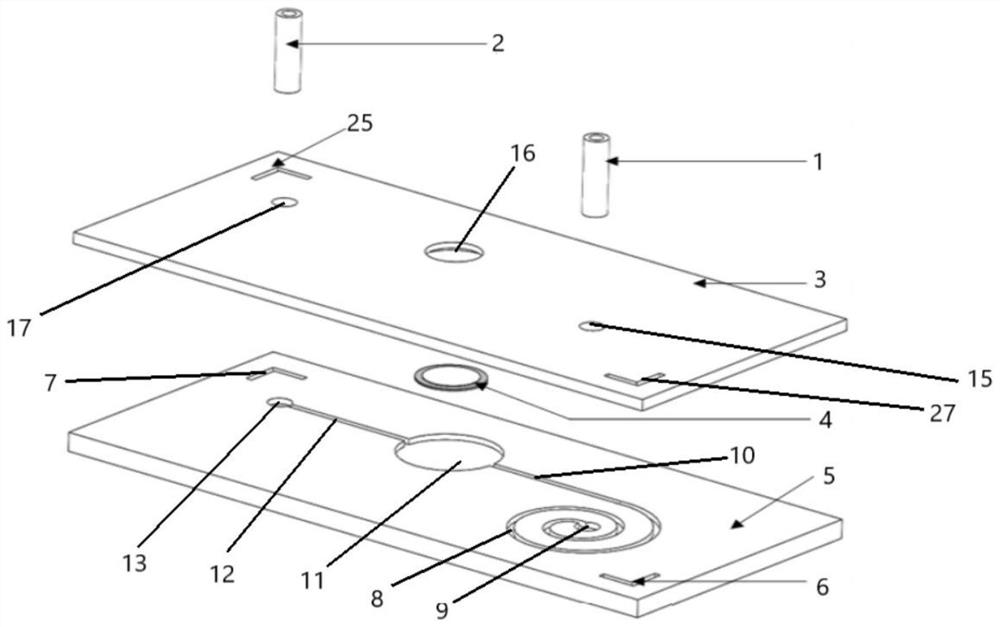
图1是本发明的无阀压电泵的结构示意图。
图2是本发明的下盖结构示意图。
图3是本发明的上盖结构示意图。
图4是本发明的上盖剖视图。
图5是本发明的无阀压电泵的另一结构示意图。
图6是本发明的压电单元的结构示意图。
图7是本发明的压电振子结构示意图。
图8是本发明的下盖的另一结构示意图。
图中:
1-第一微流管;2-第二微流管;3-上盖;4-第一压电振子;5-下盖;6-第一对准标记;7-第二对准标记;8-第一平面阿基米德螺线微通道;9-流体进口;10-第二连通微通道;11-微腔;12-第一连通微通道;13-流体出口;15-第一安装孔;16-第三安装孔;17-第二安装孔;18-压电单元;19-导线;20-第一传感器;21-无阀压电泵;22-压电振子固定件;23-第二压电振子;24-第三压电振子;25-第三对准标记;26-第二传感器;27-第四对准标记;28-第二平面阿基米德螺线微通道;41-衬底;42-导电层;111-第一凹槽;112-第二凹槽。
具体实施方式
下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例的详细描述和附图用于示例性地说明本发明的原理,但不能用来限制本发明的范围,即本发明不限于所描述的实施例,在不脱离本发明的精神的前提下覆盖了零件、部件和连接方式的任何修改、替换和改进。
需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。下面将参照附图并结合实施例来详细说明本申请。
图1是本发明实施例的一种阿基米德螺线微通道无阀压电泵的MEMS流体陀螺的结构示意图,如图1、图2和图5所示,该MEMS流体陀螺包括相互贴合的上盖3和下盖5,该上盖3与该下盖5之间设有微腔11,该微腔11内的容纳有第一压电振子4,还包括采用MEMS工艺成型于上盖3或下盖5上的第一平面阿基米德螺线微通道8,该上盖3或下盖5上还设有第一连通微通道12,该第一平面阿基米德螺线微通道8的两端分别连接有微腔11和流体进口9,该流体进口9的另一端连接有第一微流管1,第一连通微通道12的两端分别连接微腔11和流体出口13,该流体出口13的另一端连接有第二微流管2,该流体进口9与流体出口13均设于上盖3或下盖5上,上盖3或下盖5均设有用于安装第一微流管1以及第二微流管2的第一安装孔15和第二安装孔17,第一微流管1与第二微流管2远离流体进口9的一端均设置有压电单元18,压电单元18通过导线19与用于测量压电单元18的电荷变化量的传感器单元连接,具体来说,该传感器单元还能够传导该电荷变化量信号,该MEMS工艺包括利用SU-8光刻负胶图形化出第一平面阿基米德螺线微通道的凸模(图中未示出);然后在该凸模上浇筑PDMS(聚二甲基硅氧烷)待其固化后剥离凸模得到PDMS材质的第一平面阿基米德螺线微通道8。本实施例中,下盖5为由PDMS材料制作的矩形板,该上盖3为由PDMS材料制作的矩形板或由铝合金材料制作的矩形铝板,该第一平面阿基米德螺线微通道8通过MEMS工艺先加工出下盖5上的第一平面阿基米德螺线微通道8的凸模即模型,然后在该凸模上浇筑PDMS材料用于整体成型具有第一平面阿基米德螺线微通道8的下盖5,且该第一连通微通道12也对应设于该下盖5上,需要说明的是该第一平面阿基米德螺线微通道8也能够设于上盖3上,那么上盖3的只能为PDMS材料制成,而下盖5可以由PDMS材料制作的矩形板或由铝合金材料制成。为了提升封装上盖3与下盖5的效率,分别在下盖5上设有第一对准标记6和第二对准标记7,在上盖3上设有第三对准标记25和第四对准标记27,封装前,通过将第一对准标记6与第四对准标记27以及第二对准标记7与第三对准标记25分别对准,保证上盖3与下盖5对正贴合,提高封装的质量与速度。
本发明通过利用MEMS工艺(微纳加工技术)在无阀压电泵的泵体上制备平面阿基米德螺线微流控通道以及采用MEMS工艺制备压电振子,使得该MEMS流体陀螺结构简单,成本低廉,尺寸较小,适用范围广,易于实现和大规模量产。
作为一种优选实施方式,如图1、图5和图6所示,该压电单元18包括第二压电振子23或第三压电振子24,该第一微流管1远离流体进口9的一端连接第二压电振子23,该第二微流管2远离流体出口13的一端连接第三压电振子24,该传感器单元包括第一传感器20或第二传感器26,第二压电振子23通过导线19与第一传感器20连接;第三压电振子24通过导线19与第二传感器26连接。利用第一传感器与第二传感器可以分别测量第二压电振子和第三压电振子的电荷变化量,并根分析出电荷变化量和受到冲击压力的转换,从而计算该无阀压电泵的输出压力。
作为另一种优选实施方式,如图6所示,压电单元18还包括用于固定第二压电振子23或第三压电振子24于第一微流管1或第二微流管2上的压电振子固定件22。需要说明的是,该压电阵子固定件22与该第二压电振子23或第三压电振子24一体成型,通过压电振子固定件与第一微流管或第二微流管连接,使得第二压电振子或第三压电振子分别与对应的第一微流管或第二微流管连接。
作为其他可选实施方式。
优选地,如图1和图2所示,第一平面阿基米德螺线微通道8与微腔11之间设有第二连通微通道10,第二连通微通道10的两端分别与第一平面阿基米德螺线微通道8与微腔11连通。
优选地,本发明中,基于阿基米德螺线微通道无阀压电泵中采用一个平面阿基米德螺线微通道即可实现泵体中流体的单向流动,也可以采用两个平面阿基米德螺线微通道实现双向流动,如图8所示,上盖3或下盖5上设有通过MEMS工艺在上盖3或下盖5上形成有第二平面阿基米德螺线微通道28,第二平面阿基米德螺线微通道28的两端分别与第一连通微通道12和流体出口13连通,第一平面阿基米德螺线微通道8为以流体进口9为中心和起点逆时针方向设置的阿基米德螺线微通道,第二平面阿基米德螺线微通道28为以流体出口13为中心和起点顺时针方向设置的阿基米德螺线微通道,第一平面阿基米德螺线微通道8与第二平面阿基米德螺线微通道28对称布置与上盖3或下盖5上,流体进口9和流体出口13以对称布置在微腔11的中心线的两侧。这里需要说明的是,第一平面阿基米德螺线微通道8与第二平面阿基米德螺线微通道28的均是通过MEMS工艺制备,相比一个平面阿基米德螺线微通道,只需要利用SU-8光刻负胶图形化出第一平面阿基米德螺线微通道与第二平面阿基米德螺线微通道28的另一凸模(图中未示出)即可,然后整体浇筑PDMS材料用于整体成型具有第一平面阿基米德螺线微通道8与第二平面阿基米德螺线微通道28的下盖5。需要说明的是可以采用相同的成型工艺将该第一平面阿基米德螺线微通道8与第二平面阿基米德螺线微通道28成型于上盖3上。
优选地,如图1、图2与图4所示,下盖5上设有第一凹槽111,该上盖3上的第二凹槽112,该上盖3上设有第三安装孔16,该第二凹槽112设于该第三安装孔16中,封装时,外加一个盖板将该第三安装孔进行密封,第一凹槽111与第二凹槽112密封配合形成微腔11,第一压电振子4容纳在第二凹槽112内,由于第一凹槽的深度使得第一压电振子在振动时有足够的空间产生位移,为了使第一压电振子工作时达到最佳的效果并考虑无阀压电泵21的泵体上其他结构的设置、加工,将该第二凹槽112设计成阶梯状。该微腔11可以设置在下盖5上且开口朝向上盖3,也可以设置在上盖3上且开口朝向下盖5,该微腔11通过MEMS工艺成型于下盖5上,且该微腔11的截面呈圆形,与第一压电振子4的形状相适配。
优选地,该第一压电振子4、第二压电振子23与第三压电振子24具有相同的结构,下面针对其中一个压电振子的具体结构进行说明,如图7所示,该第一压电振子4包括衬底41以及采用溅射工艺成型于衬底41上的导电层42,导电层42包含金属层与压电功能材料层,该压电功能材料层嵌入至衬底41内与该衬底41镶嵌为一体,金属层位于压电功能材料层的上方,衬底41由硅材料制成,压电功能材料层由无机压电材料制成,该金属层为金层,压电功能材料层由无机压电材料制成,该无机压电材料可以选取压电陶瓷、水晶(石英晶体)、镓酸锂、锗酸锂、锗酸钛以及铁晶体管铌酸锂、钽酸锂中的一种或多种,优选为压电陶瓷,该压电功能材料层为压电陶瓷片。
本发明的传感器(20,26)可以测量由具压电振子(23,24)的电荷变化量,并根据分析装置分析出电荷变化量和受到冲击压力的转换。其原理是压电振子利用正压电效应来实现力电转化,即当压电材料受到机械应力时,就会产生电极化,从而产生电荷,所产生的电荷多少与机械应力成正比。利用信号分析装置对所产生的电信号进行测量分析,就可以得到受到力的大小。当压电振子受到的压力不同时,就会使压电振子的产生电荷不同,电荷信号经电荷放大器放大转成电信号后,经模数转换器到计算机接受分析、计算、并给出测试结果。在本发明中,使用压电振子力传感器,测量泵的输出压力。
本发明的基于阿基米德螺线微通道无阀压电泵新型MEMS液体陀螺工作时,先对压电振子施加交流电压,压电振子在逆压电效应下产生轴向振动,引起微腔容积变化;一般可将压电泵的一个工作周期分为两个阶段:从下死点(压电振子在微腔内远离平衡位置的最大位移)经平衡位置到达上死点(压电振子在微腔外远离平衡位置的最大位移)为泵的吸程阶段;从上死点经平衡位置到达下死点为泵的排程阶段。当压电振子从下死点向上死点运动,即微腔容积从最小向最大变换过程中,一边的流体由第一连通微通道直接进入微腔,另一边的流体经过第一螺线微通道进入微腔或者通过第二连通微通道进入微腔,这个过程中,流体在螺线微通道的流动方向,是螺线微通道的曲率逐渐减小的方向;当压电振子从上死点向下死点运动,即微腔容积从最大向最小变换过程中,流体从微腔通过两边的连通微通道向外排出,流体在螺线微通道的流动方向,是螺线微通道的曲率逐渐增大的方向。由于曲率的变化不同,曲率逐渐增大,受到地球科氏力和自旋科氏力的影响,流体受到的阻力是逐渐增大的,曲率逐渐减小,受到地球科氏力和自旋科氏力相反作用的影响,阻力是逐渐减小的,那么流体在通过螺线微通道的往返方向上流动受到的阻力不同,那么流体其从一边的螺线微通道向微腔流入的流量,和从微腔向另一边流出的流量就会不同,使得整个周期内会有一个净流量从进口微通道方向流向出口微通道,当压电振子连续振动时,流体在宏观上就会变现出单向流动,实现泵的功能。
当整个陀螺结构安装在承载平台上,如果承载平台受到转动角速度的影响,比如安装在载具上,载具转弯转动时,整个转动会对陀螺结构中的阿基米德螺线微通道无阀压电泵性能产生影响。
设地球自转的角速度在Z轴的分量为
如果平台没受到外界扰动ω
为了进一步说明本发明的技术效果,结合本发明的工作原理作如下说明,如图1至图8所示,本实施例的陀螺工作过程如下:对第一压电振子4施加交流电压,第一压电振子4在逆压电效应下在平衡位置两侧产生轴向振动,轴向振动位移引起微腔容积变化。把无阀压电泵21的一个工作周期分为两个阶段:从下死点(第一压电振子4向下远离平衡位置的最大位移)经平衡位置到达上死点(第一压电振子4向上离平衡位置的最大位移)为无阀压电泵21的吸程阶段;从上死点经平衡位置到达下死点为无阀压电泵21的排程阶段。当无阀压电泵21处于吸程时,微腔11容积变大,压强变小,在负压作用下第一连通微通道12和第二连通微通道10中的流体向微腔11中流动,从流体进口9流进的流体经过第一阿基米德螺线通道8即槽时,由于受到地球科氏力和自旋科氏力的影响,第一阿基米德螺线微通道8的螺旋线曲率变化方向是逐渐减小的,相对与螺旋线曲率逐渐增大的过程,对流体的流动阻碍小,那么进入微腔11的流量相对大些,当无阀压电泵21进入排程时,微腔11容积变小,在压力下微腔11中的流体向两侧的第一连通微通道12以和第二连通微通道10流出,当从微腔11向第一平面阿基米德螺线微通道8流动的流体经过螺线微通道时,由于受到地球科氏力和自旋科氏力相反作用的影响是螺旋线的曲率逐渐增大的过程,相对螺旋线曲率逐渐减小,此刻第一阿基米德螺线通道8对流体的阻碍程度大,那么从微腔11向第一阿基米德螺线通道8流出的流量就会相对较小,往返的过程中就会产生一个流量差,由于微腔11吸程和排程体积变化基本相等,那么就会使得由微腔11向第一连通微通道12流出的流量大于由第二连通微通道10向微腔11流入的流量,整个周期会产生一个单向运动的净流量,当第一压电振子4连续振动,流体在宏观上就表现出单向流动,从而形成无阀压电泵21的功能。当我们给第一压电振子4固定的输入条件时候,那么第一微流管1中的流体液面高度就会一定,对于第一压电振子4的冲击作用也是大致一样的,反映在第一传感器20(电荷传感器)中数值也是一个变化幅度比较小的恒值,如果承载平台受到转动角速度的影响,整个转动会对陀螺结构中的阿基米德螺线微通道无阀压电泵21性能产生影响,若对流体顺时针流动方向产生加强作用而对逆时针流动产生减弱作用,那么就会提高本泵的输出性能,使得第二微流管2中的液体液面上升,液面对于安装在第二微流管2中的第三压电振子24冲击也会提升,若对流体逆时针流动方向产生加强作用而对顺时针流动产生减弱作用,那么就会降低本无阀压电泵21的输出性能,使得出口的液体液面下降,液面对于安装在其中的第三压电振子24冲击也会减弱,总体上说转动角速度对流体流动方向产生作用,那么就会对无阀压电泵21的输出性能产生影响,使得第一微流管1以及第二微流管2中的液体液面产生变化,液面对于安装在其中的第二压电振子23以及第二压电振子24的冲击也会变化,根据第一传感器20以及第二传感器26分别对于对应的第二压电振子23与第三压电振子24由于压电效应产生的电荷变化测量出来数值,根据两边测量出的数据就可以得出无阀压电泵21的压差变化,根据初试测定的无阀压电泵21的压差和转动的关系就可以得出转动姿态,从而达到陀螺的作用。
另一实施例的主要结构与前述的实施例基本相同,不同的是另一实施例中,在无阀压电泵21部分,有两个以圆形微腔11中心线为对称轴相对称的第一平面阿基米德螺线微通道8、第二平面阿基米德螺线微通道28,第一平面阿基米德螺线微通道8为以流体进口9为中心和起点逆时针方向设置的阿基米德螺线微通道,第二平面阿基米德螺线微通道28为以流体出口13为中心和起点顺时针方向设置的阿基米德螺线微通道。本实施例的陀螺工作时,把压电振子的金属层和压电功能材料层作为两极,向第一压电振子4通交流电时,压电功能材料层会产生沿其径向的伸缩变形,由于硅材料制成的衬底41和压电功能材料层是一体,并且他们的径向伸缩不同,所以当压电功能材料层产生沿径向的伸缩变形时,衬底41也会产生伸缩变形,且伸缩方向与压电功能材料层相反,则第一压电振子4必然会产生沿轴向(压电功能材料的法向方向)的往复变形振动,把第一压电振子4作为无阀压电泵21的动力源,随着第一压电振子4的轴向往复变形振动,从而导致微腔11的体积周期性变化。由于流体的运动受地球自转的影响,以及流体自身沿平面阿基米德螺旋微通道运动时也会产生科氏力,对沿逆时针和顺时针方向旋转的流体产生不同作用,使从流体进口流入和从流体出口流出的流体所受的阻力不相同,而流入或流出流体的体积大小又与微流管的流阻大小成反比,所以当微腔11体积增大时,流体从第一平面阿基米德螺旋微通道8和第二平面阿基米德螺旋微通道28流入微腔11,此时无阀压电泵21处于吸程阶段,但从第一微流管1和第二微流管2流入微腔11的流体体积不相同;当微腔11体积减小时,流体从第一平面阿基米德螺旋微通道8和第二平面阿基米德螺旋微通道28流出微腔11,此时无阀压电泵21处于排出阶段,但从第一微流管1和第二微流管2流出微腔11的流体体积不相同;分析从两微流管在无阀压电泵21处于吸入和排出阶段时,流入和流出的流体体积的多少可以概括为:在无阀压电泵21处于吸入阶段,流入流体体积多的,则在无阀压电泵21处于排出阶段时流出流体的体积少;在无阀压电泵21处于吸入阶段是流入流体体积少的,则在无阀压电泵21处于排出阶段时流出流体的体积多;从宏观上看,无阀压电泵21总是使流体从一个微流管流入,从另一个微流管流出,从而实现了流体的单向流动,实现了泵的功能。当给第一压电振子4固定的输入条件时候,那么第一微流管1与第二微流管2中的流体液面高度就会一定,对于第一压电振子4的冲击作用也是大致一样的,反映在第一电荷传感器20与第二电荷传感器26中数值也是一个变化幅度比较小的恒值,如果承载平台受到转动角速度的影响,整个转动会对陀螺结构中的阿基米德螺线微通道无阀压电泵21性能产生影响,若对流体顺时针流动方向产生加强作用而对逆时针流动产生减弱作用,那么就会提高本泵的输出性能,使得第二微流管2中的液体液面上升,液面对于安装在第二微流管中的第三压电振子冲击也会提升,若对流体逆时针流动方向产生加强作用而对顺时针流动产生减弱作用,那么就会降低本泵的输出性能,使得出口的液体液面下降,液面对于安装在其中的压电振子冲击也会减弱,总体上说转动角速度对流体流动方向产生作用,那么就会对泵的输出性能产生影响,使得第一微流管1和第二微流管2中的液体液面产生变化,液面对于安装在其中的压电振子冲击也会变化,根据电荷传感器对于第二压电振子第三压电振子24由于压电效应产生的电荷变化测量出来数值,根据两边测量出的数据就可以得出泵的压差变化,根据初试测定的泵的压差和转动的关系就可以得出转动姿态,从而达到陀螺的作用。
需要明确的是,本说明书中的各个实施例均采用递进的方式描述,各个实施例之间相同或相似的部分互相参见即可,每个实施例重点说明的都是与其他实施例的不同之处。本发明并不局限于上文所描述并在图中示出的特定步骤和结构。并且,为了简明起见,这里省略对已知方法技术的详细描述。
以上所述仅为本申请的实施例而已,并不限制于本申请。在不脱离本发明的范围的情况下对于本领域技术人员来说,本申请可以有各种更改和变化。凡在本申请的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本申请的权利要求范围内。
- 一种基于阿基米德螺线微通道无阀压电泵的MEMS流体陀螺
- 一种基于阿基米德螺线流管无阀压电泵的陀螺