新能源商用车智能驾驶线控底盘控制系统及控制方法
文献发布时间:2023-06-19 10:41:48
技术领域
本发明涉及新能源汽车设计领域,具体涉及一种适用于新能源商用车智能驾驶线控底盘控制方法。
背景技术
在随着智能技术的不断发展,智能驾驶技术凭借其广阔的应用前景,已经成为汽行业的研究热点。国内的智能驾驶车辆绝大部分都是在现有的量产车上进行改装,其底盘大都采用新能源车型及自动变速箱,以便于适应智能驾驶改装。目前智能驾驶线控底盘的控制主要采用模拟驾驶人员相关动作进行控制。存在改制成本高,结构复杂,安全隐患大。适应性较差等问题。
随着汽车电子技术的快速发展,车辆底盘的电控化、总线化为智能驾驶系统对车辆底盘的控制提供了新的途径。针对新型的新能源商用车电控底盘,对其有效的控制,安全的控制成为研究的主要方向。
根据目前实现智能驾驶后的用途及应用前景,其功能要求主要有以下几个方面:
1)智能系统可以控制车辆油门、刹车、转向、档位;
2)车辆既可以智能驾驶也可以有人驾驶,且智能驾驶模式与有人驾驶模式可以快速切换;
3)智能驾驶系统可以控制车辆的灯光、起动、熄火、喇叭;
4)智能驾驶系统可以控制车辆的全轮驱动装置,包括轮轴差、分动器;
5)智能驾驶模式车辆具有紧急停车功能;
6)智能驾驶系统能够实现汽车车速、档位及方向盘转角等信号的监测。
智能驾驶控制系统通过智能驾驶控制总线向智能驾驶底盘控制器发送油门、档位、制动、转向等控制指令,智能驾驶底盘控制器将油门等指令转换为底盘各电控系统可以识别的信号或指令,通过底盘动力总线接口或底盘各电控单元I/O进行控制,对于喇叭、电磁阀等车辆电器负载,则通过智能驾驶底盘控制器本身的功率驱动口进行控制。智能驾驶底盘控制器能够将车辆最基本的车速、电机转速、档位及方向盘转角等信息通过CAN总线传递给智能驾驶控制层,做到精准控制。
发明内容
本发明为解决现有技术采用模拟驾驶人员相关动作进行控制。存在改制成本高,结构复杂,安全隐患大以及适应性较差等问题,提供一种新能源商用车智能驾驶线控底盘控制系统及控制方法。
包括智能驾驶控制模块,与所述能驾驶控制模块通过CAN总线通讯的电子转向系统、电子驻车系统、档位控制系统、整车控制器、组合仪表、制动系统以及车身控制单元;
所述CAN总线采用SAEJ1939-71规定的标准SPN协议;
所述智能驾驶控制模块根据接收电子转向系统的转向信号,控制转向角速度和目标角度;根据接收的电子驻车系统驻车信号,向电子驻车系统发送指令,所述电子驻车系统根据指令要求,完成指令驻车、释放及坡起辅助功能;
所述智能驾驶控制模块接收档位控制系统的档位信号,并控制档位控制系统按照整车需求控制D、R和N挡位,自动变速系统负责档位升降;
所述智能驾驶控制模块接收VCU的加速信号,并控制VCU发送扭矩请求,模拟油门踏板开度信息进行发送指令;
所述智能驾驶控制模块接收组合仪表的显示信息,并在组合仪表上显示;
以及车身控制单元的车身控制信号;
所述智能驾驶控制模块接收制动系统的制动信号,并向制动系统发送制动指令,使制动系统按照模拟发送制动踏板开度进行,或按照减速度进行减速控制;
所述智能驾驶控制模块接收车身控制单元发送的车身控制信号,并根据接收的控制信号向车身控制单元发送灯光、雨刷、空调及门窗、门键控制指令。
一种适用于新能源商用车智能驾驶线控底盘控制方法,该方法包括对发动机油门的控制,对变速箱档位控制,对制动系统的控制,转向控制以及对底盘电器的控制;
对发动机油门的控制方式为:采用总线方式直接对电动机油门进行控制,控制协议遵循SAEJ1939-71,底盘控制器直接向VCU转发智能驾驶控制模块发出的油门开度控制指令,所述智能驾驶控制模块接收底盘控制器发送的信息,实现对发动机运转状况进行实时远程监测;
对变速箱档位控制的方式为:
车辆采用电控液力自动变速箱,电控单元支持双换挡机构控制器,包括主换挡器和辅换挡器;且为总线控制方式,主换挡控制器的源地址为0x05,辅换挡控制器的源地址为0x06;
换挡器选择开关由底盘控制器驱动换挡器选择继电器实现;
当车辆处于有人驾驶模式时,换挡器选择继电器断开,变速箱电控系统响应主换挡器发出的报文;
当车辆处于智能驾驶模式时,底盘控制器驱动换挡器选择继电器闭合,变速箱电控系统响应辅换挡器发出的报文;所述底盘控制器接收智能驾驶控制模块总线上传输的换挡信息并向变速箱电控单元传输换挡信息;所述
智能驾驶控制模块接收变速箱的信息,实现对变速箱运转状况进行远程监测,同时当变速箱出现故障时,进行远程故障诊断。
对制动系统的控制方式为:
在行车制动方面,在车辆前桥制动回路中串入单模块电控继动阀,采用双模块电控继动阀取代传统后桥制动回路中的气控继动阀,同时电控继动阀保留了传统气控方式;驻车制动方面,在传统的驻车制动回路并入脉冲式电磁开关阀。
当车辆处于有人驾驶模式时,底盘控制器不使能EBS系统,EBS保持原有的控制逻辑;
处于智能驾驶模式时:行车制动方面,底盘控制器通过CAN总线接收智能驾驶控制模块发出的刹车踏板位置报文,底盘控制器按照规定的协议解析刹车踏板位置报文,控制EBS控制器进而控制底盘电控继动阀使车辆制动。同时电控继动阀上集成有压力传感器用GF监测制动气室压力,底盘控制器采集压力传感器的值并通过智能驾驶控制总线传输制动压力信息;
驻车制动方面,底盘控制器接收到智能驾驶控制总线上发送的解除手刹指令时,底盘控制器控制电磁开关阀通气,否则,控制电磁开关阀断气。
本发明的有益效果:
1、本发明所述的控制系统,简化了系统复杂度,提高了系统可靠性,节省了驾驶室宝贵的安装空间。
2、本发明所述的控制系统,省去了以往车型改装需要进行的大量机电系统设计工作,只需更改部分通讯协议,即可实现智能驾驶系统在不同车型之间的移植,具体较强的适应性。
3、本发明所述的控制系统,通过车辆总线可以获得车辆底盘丰富的数据,这些数据可以用于修正智能驾驶的智能控制策略,有助于提高智能驾驶重型车辆的整体性能。
附图说明
图1为现有智能驾驶控制系统的原理框图;
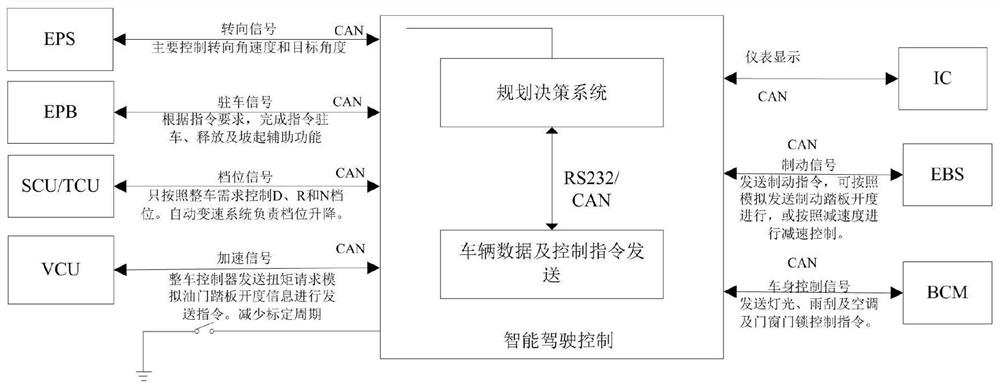
图2为本发明所述的新能源商用车智能驾驶线控底盘控制系统的原理框图图。
具体实施方式
结合图2说明本实施方式,新能源商用车智能驾驶线控底盘控制系统,智能驾驶车辆系统通讯采用SAE1939,控制指令采用“专有A”报文,信息报文采用SAEJ1939-71规定的标准SPN,如信息无定义则可自主定义SPN。根据SAE1939定义及控制器功能,系统对控制器都规定了源地址。
本实施方式所述的智能驾驶线控底盘控制系统,包括电子转向系统(EPS)、电子驻车系统(EPB)、档位控制系统(SCU/TCU)、整车控制器(VCU)、智能驾驶控制模块、组合仪表(IC)、制动系统(EBS)以及车身控制单元(BCM);
所述智能驾驶控制模块与EPS、EPB、SCU/TCU、VCU、IC、EBS以及BCM均通过CAN总线通讯,所述CAN总线采用SAEJ1939-71规定的标准SPN协议。
所述智能驾驶控制模块根据接收EPS的转向信号,控制转向角速度和目标角度;根据接收的EPB驻车信号,向EPB发送指令,所述EPB根据指令要求,完成指令驻车、释放及坡起辅助功能;
所述智能驾驶控制模块接收SCU/TCU的档位信号,并控制SCU/TCU按照整车需求控制D、R和N挡位,自动变速系统负责档位升降;
所述智能驾驶控制模块接收VCU的加速信号,并控制VCU发送扭矩请求,模拟油门踏板开度信息进行发送指令;
所述智能驾驶控制模块接收IC的显示信息,并在IC上显示;
所述智能驾驶控制模块接收EBS的制动信号,并向EBS发送制动指令,EBS控制接收智能驾驶控制器发送的模拟制动踏板开度,或按照减速度进行减速控制;
所述智能驾驶控制模块接收BCM发送的车身控制信号,并根据接收的控制信号向BCM发送灯光、雨刷、空调及门窗、门键控制指令。
具体实施方式二、本实施方式为具体实施方式一所述的新能源商用车智能驾驶线控底盘控制系统的控制方法,该方法包括对发动机油门的控制,对变速箱档位控制,对制动系统的控制,转向控制以及对底盘电器的控制;
所述对发动机油门的控制,根据电动机控制功能的开放程度,采用总线方式直接对电动机油门进行控制,控制协议遵循SAEJ1939-71。底盘控制器直接向VCU转发智能驾驶控制系统发出的油门开度控制指令。
对变速箱档位控制,目标车辆采用的电控液力自动变速箱,其电控单元支持双换挡机构控制器(主换挡器和辅换挡器),且为总线控制方式,主换挡控制器的源地址为0x05,辅换挡控制器的源地址为0x06。换挡器选择开关用于告知变速箱换挡操作由哪个换挡器控制,换挡器选择开关由底盘控制器驱动换挡器选择继电器来实现。当车辆处于有人驾驶模式时,换挡器选择继电器断开,变速箱电控系统响应主换挡器发出的报文;当车辆处于智能驾驶模式时,底盘控制器驱动换挡器选择继电器闭合,变速箱电控系统响应辅换挡器发出的报文,此时,底盘控制器接收智能驾驶控制总线上传输的换挡信息并向变速箱电控单元传输换挡信息。如果要在双换挡器之间进行切换时,两个换挡器都必须处于空档且车辆静止。同样,智能驾驶控制系统接收变速箱的重要信息,实现对变速箱运转状况进行远程监测,同时当变速箱出现故障时,可以远程故障诊断。
本实施方式中,对制动系统的控制方式为:
为了实现智能驾驶控制系统对重型车辆制动系统的控制,必须进行制动系统电控化改装。系统采用国内技术成熟可靠的EBS系统。行车制动方面,在前桥制动回路中串入单模块电控继动阀,用双模块电控继动阀取代传统后桥制动回路中的气控继动阀,同时电控继动阀保留了传统气控方式;驻车制动方面,在传统的驻车制动回路并入脉冲式电磁开关阀。
当车辆处于有人驾驶模式时,底盘控制器不使能EBS系统,EBS保持原有的控制逻辑。处于智能驾驶模式时:行车制动方面,底盘控制器通过智能驾驶控制总线接收智能驾驶控制系统发出的刹车踏板位置报文,底盘控制器按照规定的协议解析刹车踏板位置报文,控制EBS控制器进而控制底盘电控继动阀使车辆制动。同时电控继动阀上集成有压力传感器用来监测制动气室压力,底盘控制器采集压力传感器的值并通过智能驾驶控制总线传输制动压力信息;驻车制动方面,底盘控制器接收到智能驾驶控制总线上发送的解除手刹指令时,底盘控制器控制电磁开关阀通气,反之则控制电磁开关阀断气。
本实施方式中,转向控制方式为:
由于目前车辆的转向系统机构还无法实现线控方式,必须采取硬连接,因此智能驾驶重型车辆转向系统还需采用机电控制系统进行转向控制,但是部分部件可以实现总线控制。系统方案中伺服电机外接行星减速器与转向管柱机械连接,电机驱动器控制伺服电机转动带动转向管柱转动,实现对智能驾驶越野车辆的转向控制。当车辆处于智能驾驶模式,电机驱动器通过智能驾驶控制总线接收目标转向角度及转动方向信息,同时通过总线接收角度传感器发出的实际方向盘角度信息,通过计算后驱动电机转动达到目标转向角度;当车辆处于有人驾驶模式时,电机不通电,电机可跟随方向盘进行转动。
本实施方式中,智能驾驶控制系统对底盘电器控制主要包括雨刮、灯光及电磁阀控制。系统通过在原有车型上变更智能化车身控制器实现智能驾驶控制系统对车辆底盘电器的控制,同时,为了采集车身信息,底盘控制器需连接到底盘车身总线上,将车辆底盘车速、气压、油量信号打包成CAN报文发送至智能驾驶控制总线上供智能驾驶顶层控制使用。系统对底盘电器控制的改装方式无须更改原有车辆车身控制器的控制协议,只需增加控制线路转换继电器来进行控制信号切换。系统对车身信息的采集是通过底盘控制器间接转发CAN报文的方式实现,底盘控制器充当网关对CAN信息进行过滤,只对所需的信息进行打包重组,最后发送至智能驾驶控制总线上供智能驾驶控制使用,其优点在于:减轻智能驾驶控制总线上的负载率,确保总线通讯顺畅。
本实施方式中,CAN通讯采用SAE1939协议,控制报文采用“专有A”报文,结合表1为SAEJ1939-71协议的部分信息,
表1
根据表1,了解智能驾驶线控底盘主要控制信息通讯协议。
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
- 新能源商用车智能驾驶线控底盘控制系统及控制方法
- 一种智能驾驶线控底盘及其控制方法