一种塔式起重机无人化控制系统
文献发布时间:2023-06-19 10:55:46
技术领域
本发明涉及塔式起重机控制技术领域,具体涉及一种塔式起重机无人化控制系统。
背景技术
塔机是垂直运输的重要设备,是建筑安装工程必不可少的重要工具,但是建筑塔机都属于高空作业,操作人员天天在百米高空操作控制塔机,危险性大,工效低;由于其安全风险极高导致了这个岗位用工难、用工贵的问题比较突出,严重制约着这个行业发展,同时由于我国老龄化速度加快,在百米高空操作塔机的矛盾越来越突出。
中国专利“一种塔式起重机落地式操作系统”(授权公告号:CN206842899 U)记载了塔式起重机操作系统,其包括无线远程控制系统、视频监控系统。将原设计塔式起重机高空驾驶室改设为便携式控制台,解决原设计高空作业问题,用视频监控系统实现对危险工作区和盲区的实时监控。具备遥控操作、降低操作人员的安全风险;以及无线遥控的特点。但是该技术方案存在一定的弊端,主要表现在:①针对的是单台塔机,不能实现一人操作多台;②没有定位功能;③无塔机吊钩摆幅监测、应力应变监测、毫米波雷达防碰撞功能;④不具备远程遥控功能。如何提高塔式起重机工作效益、实现一人操作多台塔机、使塔机更安全、更高效是塔式起重机无人化控制系统追求的目的。
发明内容
本发明提供了一种塔式起重机无人化控制系统,能够实现塔机无人化控制,减少人力作业,降低司机安全风险,提高企业经济效益。
本发明采取的技术方案为:
一种塔式起重机无人化控制系统,该系统包括:云服务器平台、塔机遥控终端;
所述云服务器平台通过交换机5HI-08分别连接客户端T5820、中央控制台CX-LHJBB03;
所述云服务器平台通过5G通讯模块CPEPRO与塔机监控终端连接;
所述塔机监控终端与GPS固定基站M300通讯连接。
所述交换机5HI-08连接流媒体服务器DVSCAR-51,流媒体服务器DVSCAR-51连接拼接屏CB5503S。
所述塔机监控终端包括信号及通讯部分,信号及通讯部分包括交换机4HI-08,
交换机4HI-08分别连接5G通讯模块CPEPRO、移动基站1CX-E728,移动基站1CX-E728分别连接GPS天线1AT300、GPS天线2AT300;
交换机4HI-08连接力矩限制器CX-AV,力矩限制器CX-AV连接重量传感器SQ-3、幅度传感器CX-FD01;
交换机4HI-08连接防碰撞信号采集仪CX-KC16,防碰撞信号采集仪CX-KC16连接多个防碰撞传感器CX-HB100;
交换机4HI-08分别连接数传电台3SZ02、现地遥控接收机JT-KP。
所述塔机监控终端还包括操作控制部分,操作控制部分包括PLC控制器S7-1500、触摸屏TCP7062Ti;
PLC控制器S7-1500分别连接左操作手柄、右操作手柄、触摸屏TCP7062Ti;
PLC控制器S7-1500连接防摇摆模块CX-FY400,防摇摆模块CX-FY400连接小车变幅变频器;
PLC控制器S7-1500分别连接起升控制变频器、左回转变频器、右回转变频器;
所述PLC控制器S7-1500连接交换机4HI-08。
所述PLC控制器S7-1500分别连接风速传感器YS-CF、钢丝绳磨损传感器CX-CP-3A、吊钩高度编码器GM58S10K6MA12WN、作业面高度传感器HJ-200A。
所述塔机监控终端还包括视频监控部分,视频监控部分包括交换机3HI-08;
交换机3HI-08连接交换机4HI-08;
交换机3HI-08连接录像机DS-7808N-K2,录像机DS-7808N-K2连接显示器E1715SC。
交换机3HI-08分别连接起升钢丝绳摄像机、变幅钢丝绳摄像机、起重臂下球机、平衡臂下球机;
交换机3HI-08连接网桥4MWB505,网桥4MWB505连接网桥3MWB505,网桥3MWB505连接交换机2005,小车下摄像机CX-SXJ02连接交换机2005;
交换机2005连接网桥2MWB505,网桥2MWB505连接网桥1MWB505,网桥1MWB505连接交换机1005;左吊钩摄像机、右吊钩摄像机均连接交换机1005。
所述塔机监控终端还包括小车监控部分,小车监控部分包括恒力矩电源卷筒YLJ90-3/6、交换机2005;
交换机2005分别连接网桥2MWB505、吊钩摄像机、网桥3MWB505、移动基站2CX-E728;移动基站2CX-E728分别连接GPS天线2AT300、数传电台2SZ02;
恒力矩电源卷筒YLJ90-3/6连接开关电源RS-75-12,开关电源RS-75-12连接交换机2005,开关电源RS-75-12连接无线充电器A-PWS-200-DC-70。
所述塔机监控终端还包括吊钩监控部分,吊钩监控部分包括单片机STM32F101C8T6,单片机STM32F101C8T6分别连接防碰撞传感器DYP-A05-V1.0、人体感应传感器HC-SR501、水平传感器ZCT215FL-V1;
单片机STM32F101C8T6连接交换机1005,交换机1005分别连接网络摄像机BS-CA33-IP、网桥1MWB505;
单片机STM32F101C8T6连接声光报警器LTE-1101J;
网桥1MWB505连接网桥4MWB505。
所述吊钩监控部分还包括无线充电接收器B-PWS-200-DC-70、锂电池DLP-24V;
无线充电接收器B-PWS-200-DC-70连接锂电池DLP-24;
锂电池DLP-24V连接电池电压传感器LTC2944,电池电压传感器LTC2944连接单片机STM32F101C8T6;
单片机STM32F101C8T6连接控制继电器ZZ-0071,控制继电器ZZ-0071连接数传电台1SZ02。
本发明一种塔式起重机无人化控制系统,技术效果如下:
1、本发明使用GIS地图对塔机及现场进行数字化,对塔机及周边建筑物建立数字化模型,在数字化模型基础上实现数字化控制及管理;
2.本发明具备远程无人化遥控功能;通过在GIS电子地图上对塔机起点及落点坐标进行设置,利用卫星定位技术及现地遥控接力技术、实现塔机远程起升、下降,回转、变幅等各种操作控制;
3.一人遥控多台塔机自动运行,充分利用云平台远程智能控制与现地遥控相结合的机制,实现一个人遥控多台塔机的目标,从而有效降低用工用工成本;
4.本发明具备5G通讯功能,确保无线通讯带宽满足控制系统要求,而不出现数据堵塞及卡顿;
5.本发明具备防摇摆控制功能,通过大数据及人工智能对塔机吊钩摆幅进行有效抑制,确保塔机稳定、可靠的起升、变幅及下降;
6.本发明具备小车运行可视化功能,小车上安装有卫星移动基站及监控吊钩的长焦距摄像机,通过小车卫星移动基站可以清晰地监控小车及吊钩位置,可以清晰地判断小车幅度及臂架角度以及离周边障碍物的最小安全距离等;通过摄像机可以清晰监控小车下吊钩运行工况;
7.本发明具备吊钩智能化功能,①人体感应报警功能:吊钩上面安装有人体感应传感器、通过人体感应传感器可以判断吊钩下是否有人及对控制系统是否减速或者停止下放操作;②吊钩下视频监控功能,通过吊钩摄像机可以远距离监控吊钩下实时工况;③吊钩横拉倾斜扯违章作业监控报警功能,通过水平传感器可以判断吊钩在吊物时是否有及及预防吊钩落地时倾斜压坏吊钩监控设备;④无线智能充电功能,当吊钩闲置时,PLC控制器会命令吊钩去自动充电,不需要人为干预或者经常换电池;⑤吊钩电源智能管理功能,当吊钩闲置时,PLC控制器会通过无线数传电台命令电源管理继电器动作切断供电回路,从而节省电能消耗,延长电池使用寿命;
8.本发明具备视频监控功能,起重臂及平衡臂下全方位视频监控,吊钩运行视频监控+钩头作业视频监控,对起重臂及平衡臂下作业面工况、小车下工况、钩头下工况一览无余,为正确判断现场工况提供了全方位视频支持;
9.本发明具备塔身防倾翻报警功能,利用GPS卫星定位技术,监测塔身倾斜度,当塔身倾斜度超过设定值时自动报警、自动控制,为塔机远程遥控奠定重要安全基础;
10.本发明具备臂架、吊钩防碰撞报警功能,利用微波雷达对塔机臂架、吊钩构筑安全防护屏障,当相邻塔机向我塔机臂架或者吊钩移动,或者我的臂架或者吊钩向周边建筑物、障碍物、相邻塔机、设备移动进入臂架或者吊钩安全防护屏障时系统就会报警,自动控制,从而预防臂架、吊钩与相邻塔机、周边建筑物、障碍物、相邻设备等发生碰撞;
11.本发明具备塔机安全运行全方位监护功能,系统安装有塔机安全监控管理系统、塔机电气故障监测报警系统、塔机高强度螺栓紧固扭矩监控系统,钢丝绳磨损监测报警、塔机臂架关键部位应力应变监测系统等,确保塔机任何部位不达标、不健康都会实时反馈在GIS远程监控平台上;
12.本发明具备手机移动监控、查询等功能。
附图说明
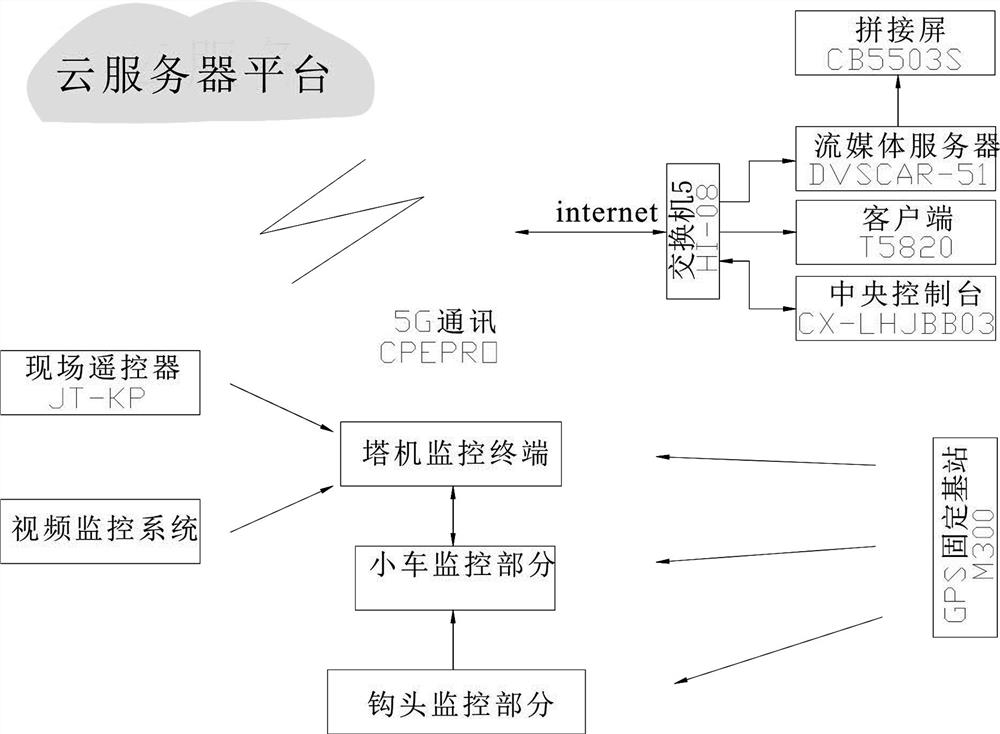
图1为本发明的系统架构图。
图2为场地GIS电子地图制作流程图。
图3为固定基站原理图。
图4为塔机臂架数字化建模流程图。
图5为周边建筑物数字化建模流程图。
图6为本发明塔式起重机无人化控制系统原理图。
图7为塔机监控终端工作原理图。
图8为平台远程遥控和现场遥控工作流程图。
图9为视频监控部分原理图。
图10为塔身倾斜度监测报警原理图。
图11为塔机电子防摇摆原理图。
图12为二次加速及二次减速原理图。
图13为塔机臂架主动防碰撞报警原理图。
图14为小车监控部分原理图。
图15为吊钩监控部分原理图。
图16为周边建筑物、障碍物电子安全围栏的建立流程图。
具体实施方式
一种塔式起重机无人化控制系统,采用SOA技术架构和B/S结构搭建塔机无人化远程遥控管理平台,利用GIS电子信息技术、大数据及AI技术,为塔机自动化控制建立数字化、可视化基础;然后再采用GPS定位、防摇摆控制、5G通讯等先进手段,实现塔机远程遥控、自动寻位、空间防碰撞、吊钩智能识别等从而实现塔机的无人化控制,系统架构如图1所示。系统分为三部分:数据采集控制及报警部分、云服务器平台部分、管理控制部分;数据采集控制及报警部分主要由各种传感器、PLC、变频器、触摸屏、遥控器等组成,主要负责塔机信息采集及现地控制;云服务器平台部分主要由GIS电子地图、云服务器、数据库等组成,主要负责为塔机智能控制终端提供GIS电子地图支持及云计算、AI计算支持服务、为数据可靠存储、数据分析等奠定基础。管理控制部分主要负责对塔机的远程操作、控制、查询、监管等从而实现塔机无人化控制,减少人力作业,降低司机安全风险,提高企业经济效益。
各部分功能的实现:
1:场地GIS电子地图的开发:首先提供工地场地、设备、建筑物等CAD地图,本发明在此基础上采用美国ESRI公司的MO(Map Objects)组件式GIS软件,以文件形式组织和管理矢量数据和影像数据,从而在同一环境中显示多源的空间数据,实现地理空间数据的操作功能。然后建立基于oracle数据库,以ID联结图形和属性数据,实现空间信息和属性信息的综合应用。使用Microsoft VB(Visual Basic)Enterprise Edition作为软件开发工具,结合MO的GIS功能和oracle关系数据库管理功能,建立系统用户界面,提供空间和属性数据浏览、查询、统计、调用、制图等系统工具,实现对场地内各种设备实时的、动态的导航定位、显示、存储发布的应用平台;场地GIS电子地图制作流程如图2所示。
2:塔机数字化建模处理:
电子地图设计完成以后,就可以利用电子地图将塔机数字化建模,然后固化、编号存入数据库。
2.1、固定基站的建立:
首先在塔机工地现场75KM范围内(尽量在场地中央)开阔地房顶上安装一台卫星定位固定基站M300,固定基站上接一个卫星定位天线AT300,一台数传电台SZ02,以提高塔机移动基站卫星定位接收机的定位精度,原理图如图3所示。
2.2.塔机臂架数字化建模:
将塔机智能控制终端的卫星定位的2台移动基站CX-E728(动臂塔机是一台CX-E728移动基站;平臂塔机为2台CX-E728移动基站);在动臂塔机上CX-E728移动基站安装在平衡臂平台的智能控制柜内;在平臂塔机上一台CX-E728移动基站安装在平衡臂平台的智能控制柜内,另外一台移动基站CX-E728主机安装在移动小车上;动臂塔机用的是2个GPS定位天线AT300,一个GPS定位天线AT300安装在塔机回转中心合适位置,另外一个安装在臂架头部;平臂塔机用的是3个GPS定位天线AT300,一个安装在塔机回转中心线上,另外一个安装在臂架头部,第三个天线AT300安装在上小车上;卫星定位设备安装好以后,可以用手持定位仪G200标定塔机平衡臂及起重臂的长度、宽度,然后用经纬仪将其在地图上数字化,再将数字化后的塔机编号用程序将其固化然后存储在数据库,供使用时调用;流程图如图4所示。
2.3.周边建筑物数字化建模:
如果客户有CAD图纸,就可以直接利用CAD图纸尺寸建模,如果没有CAD图纸就要通过手动方法自己测量建模,方法是:用手持定位仪G200标定建筑物长度、宽度,然后用经纬仪将其在地图上数字化,再将数字化后的建筑物编号用程序将其固化然后存储在数据库,供使用时调用,流程图如图5所示。
3.塔机无人化控制功能的实现:
3.1塔机无人化控制系统工作原理:
塔机无人化控制系统的组成:系统是由包含场地电子地图的云服务器平台、internet网络、客户端T5820、中央控制台CX-LHJBB03、流媒体服务器DVSCAR-51、拼接屏CB5503S、塔机遥控终端S7-1500、GPS固定基站M300、小车监控部分CX-E728、钩头监控部分STM32M101C8T6、现场遥控器JT-KP、视频监控部分CX-SXJ03、5G通讯部分CPEPRO等12部分组成,原理图如图6所示。
工作时,操作人员通过客户端T5820或者中央控制台CX-LHJBB03、通过GIS监控平台到internet网络,再到5G通讯模块CPEPRO对塔机监控终端S7-1500发布各种遥控指令,GIS监控云平台通过5G通讯模块CPEPRO将命令转发给塔机监控终端S7-1500,塔机监控终端S7-1500按照客户端T5820命令去执行;吊钩到位以后由现场起重工操作遥控器JT-KP将吊钩下放到合适的位置,然后再通过现场遥控器JT-KP使吊钩起升,然后,自动交给GIS监控平台控制吊钩到指定地点。GPS固定基站M300工作时,是将自己接收到的卫星定位信息不断与塔机控制终端的移动基站1CX-E728、移动基站2CX-E728进行通讯,不断将自己的坐标送给移动基站1CX-E728、移动基站2CX-E728,由移动基站1CX-E728、移动基站2CX-E728对自己的坐标不断进行修正,从而提高塔机位置、小车位置的精确度,供塔机控制系统定位使用。钩头监控部分、小车监控部分的传感器、摄像机都是为塔机无人化控制系统服务的,它们都将自己获得的监控信息送给塔机监控系统S7-1500,塔机监控系统在使用的同时,会通过5G通讯模块CPEPRO将信息反馈给云服务器平台,客户端T5820操作人员通过云平台获取塔机当前工作状态,从而进行分析、判断再决定下一步操作控制策略。
3.2.塔机智能控制终端工作原理:
塔机监控终端的组成:它是由信号及通讯部分、操作控制部分、视频监控部分、小车监控部分、吊钩监控部分,现场遥控器等部分组成原理图如图7所示。
信号及通讯部分由5G通讯模块CPEPRO、塔机移动基站1CX-E728、GPS天线1AT300、GPS天线2AT300、力矩限制器CX-AV、重量传感器SQ-3、幅度传感器CX-FD01、防碰撞信号采集仪CX-KC16、防碰撞传感器CX-HB100、数传电台3SZ02、现地遥控接收机JT-KP、交换机4HI-08、风速传感器YS-CF、高度编码器GM58S10K6MA12WN等组成。
操作控制部分是由:PLC控制器S7-1500、触摸屏TCP7062Ti、左操作手柄、右操作手柄、防摇摆模块CX-FY400、起升控制变频器AV930、小车变幅变频器AV930、左回转变频器AV930、右回转变频器AV930等组成。现场遥控器为JT-KP。
工作时,控制中心操作人员首先在拼接屏CB5503S通过internet网络、5G通讯模块CPEPRO、交换机4HI-08、交换机5HI-08、遥控起重臂及平衡臂的球机DHK-EX300,对施工作业面进行巡视检查,观察工地现场情况有没有不符合远程无人化操作的场景,如果没有异常情况,就可以通过客户端T5820在GIS监控管理平台的场地电子地图上对将要工作的每一台塔机从起点到落点的坐标及吊钩交接点高度进行设置,让其进入自动模式,然后将设置结果由GIS监控管理平台通过internet网络送到5G通讯模块CPEPRO,再由5G通讯模块CPEPRO通过交换机4HI-08将命令转发给PLC控制器S7-1500,S7-1500又将命令转发给触摸屏TCP7062Ti,触摸屏TCP7062Ti根据程序设计下达控制命令,通过PLC控制器驱动起升变频器ATV930将吊钩提起到指定高度,高度值由高度编码器GM58S10K6MA12WN反馈停止,然后PLC控制器S7-1500再驱动左或者右回转变频器ATV930将臂架回转到指定角度,回转角度值由小车移动基站2CX-E728的GPS定位天线2AT300反馈,然后由PLC控制器S7-1500再驱动起升变频器ATV930反转将吊钩下放到设定高度,高度值由高度编码器GM58S10K6MA12WN反馈后停止,此时触摸屏TCP7062Ti会给PLC一个命令,让红色报警灯LTE1101J报警,当起重工听到吊钩到达报警声,就用现场遥控器JT-KP操作将吊钩放到合适位置,便于挂钢丝绳。当起重工将所吊物品、材料绑扎完毕挂钩后,再操作遥控器JT-KP起升按钮,吊钩就会缓缓起升,到达设定高度,高度值由高度编码器GM58S10K6MA12WN反馈后,吊钩进入自动操作模式,根据程序设定,吊钩在重物工况下PLC控制器S7-1500会驱动小车变幅变频器ATV930将小车移动到臂架根部合适位置,位置数据由小车上的移动基站2CX-E728的GPS定位天线2AT300反馈,然后PLC控制器S7-1500再驱动左/右回转变频器ATV930将臂架回转到设定位置,回转角度由小车上的移动基站2CX-E728的GPS定位天线2AT300反馈,然后PLC控制器S7-1500再驱动小车变频器ATV930变幅移动,将材料或者物品吊运到指定位置,位置数据由小车上的移动基站2CX-E728的GPS定位天线2AT300反馈,然后下放吊钩到设定高度,高度值由高度编码器GM58S10K6MA12WN反馈,此时触摸屏TCP7062Ti会给PLC一个命令,让红色报警灯LTE1101J报警,等待终点起重工通过遥控器JT-KP接收吊钩材料进行卸料操作,完毕后,按遥控器JT-KP起升按钮,吊钩就会进入到第二次循环作业。
4.一人控制多台塔机功能的实现:
由上述塔机无人化控制系统的工作原理可知,塔机无人化控制系统是由云服务器平台+控制终端+现地遥控器组成,塔机无人化控制时,是中央控制台操作人员通过客户端T5820在控制中心通过GIS监控管理平台对每一台塔机的起吊点坐标及落点位置坐标进行设置,然后将命令通过5G通讯模块CPEPRO发送给塔机控制终端,由塔机智能控制终端按照命令进入自动运行模式,塔机智能控制终端就会按照程序设置控制塔机按照流程进行来回作业。当每一台塔机到达起点坐标时吊钩会自动停止,后面的操作就交给了现场起重工,现场起重工通过遥控器JT-KP操作将吊钩下放到合适位置,将现场物料挂钩完毕,再按遥控器JT-KP起升按钮,吊钩就会缓缓起升,到达设置高度,塔机控制终端PLC S7-1500就会驱动回转变频器命令塔机自动回转,自动到达终点位置坐标后,等待落点起重工指令,落点起重工通过遥控器JT-KP命令吊钩是否下降,是否停止等,当物料下放完毕,落点起重工按遥控器JT-KP按钮起升,吊钩自动起升,再按照程序设置回到起点坐标位置,进行下一个循环操作。这样每次塔机操作人员只需要在GIS监控管理平台上将每一台塔机的起吊点坐标及落点坐标设置好,让其进入自动运行模式,塔机就会按照流程进行来回作业;此时操作人员就只需要在拼接屏上监控每一台塔机运行就行了,起点和落点的接力操作都由现场起重工通过现场遥控器JT-KP完成,这样一个操作人员就可以操作控制多台塔机运行,塔机无人化控制流程图如图8所示。
5.塔机视频监控功能的实现:
视频监控部分是由:左吊钩摄像机BS-CA33-IP、右吊钩摄像机BS-CA33-IP、交换机1005、网桥1MWB505、网桥2MWB505、小车下摄像机CX-SXJ02、交换机2005、网桥3MWB505、网桥4MWB505、起重臂下球机DHK-EX300、平衡臂下球机DHK-EX300、起升钢丝绳监控摄像机BS-CA33-IP、变幅钢丝绳BS-CA33-IP、交换机3HI-08、录像机DS-7808N-K2、显示器E1715SC、交换机4HI-08、5G通讯模块CPEPRO、交换机5HI-08、客户端T5820、流媒体服务器DVSCAR-51、拼接屏CB5503S等组成,原理图如图9所示。
工作时,左吊钩摄像机BS-CA33-IP、右吊钩摄像机BS-CA33-IP、不断将采集到的视频信号送给交换机1005、交换机1005将视频信号送给网桥1MWB505、网桥1MWB505经过无线将视频信号送给网桥2MWB505、网桥2MWB505又将信号送给交换机2005、交换机2005又将信号送给网桥3MWB505、网桥3MWB505经过无线送给网桥4MWB505、网桥4MWB505又将信号送给交换机3HI-08、交换机3HI-08将信号一路送给录像机DS-7816N-K2,进行存储、同时送给显示器E7-E1715SC;一路送给交换机4HI-08,由交换机4HI-08通过5G通讯模块OPEPRO送给交换机5HI-08,由交换机5HI-08送给流媒体服务器DVSCAR-51、由流媒体服务器DVSCAR-51送给拼接屏CB5503S进行显示,供操作人员监控使用。小车下摄像机CX-SXJ02的视频信号是通过交换机2005到网桥3MWB505、网桥3MWB505经过无线送给网桥4MWB505、网桥4MWB505又将信号送给交换机3HI-08、交换机3HI-08将信号一路送给录像机DS-7816N-K2,进行存储、同时送给显示器E7-E1715SC;一路送给交换机4HI-08,由交换机4HI-08通过5G通讯模块OPEPRO送给交换机5HI-08,由交换机5HI-08送给流媒体服务器DVSCAR-51、由流媒体服务器DVSCAR-51送给拼接屏CB5503S进行显示,供操作人员监控使用。起重臂下球机DHK-EX300、平衡臂下球机DHK-EX300、起升钢丝绳监控摄像机BS-CA33-IP、变幅钢丝绳摄像机BS-CA33-IP等的视频信号是经过交换机3HI-08一路送给录像机DS-7808N-K2,由录像机DS-7808N-K2进行存储同时送给显示器E1715SC显示。另外一路送给交换机4HI-08、由交换机4HI-08送给5G通讯模块CPEPRO,5G通讯模块CPEPRO经过网络送给交换机5HI-08,由交换机5HI-08送给流媒体服务器DVSCAR-51、流媒体服务器DVSCAR-51再送给拼接屏CB5503S进行显示,供操作人员监控使用。对起重臂下球机DHK-EX300、平衡臂下球机DHK-EX300的操作控制是由客户端T5820完成,当操作人员需要对起重臂下球机DHK-EX300、平衡臂下球机DHK-EX300进行操作时,是通过客户端T5820发布命令,通过交换机5HI-08进入网络,然后由5通讯模块CPEPRO到交换机4HI-08再到交换机3HI-08,然后分别驱动起重臂下球机DHK-EX300或者平衡臂下球机DHK-EX300的,从而实现对塔机下作业面的全方位视频监控。
6.塔身倾斜度监测报警功能的实现:
塔身垂直度是否符合塔机安全标准是塔机安全运行的基本条件,如果塔机基础下陷、塔身螺栓松动、塔机臂架变形、塔机附墙异常等都可能导致塔身倾斜,塔身垂直度出现偏差,如果塔身倾斜超过规范要求,垂直度不达标,塔机远程遥控就没有基本条件,所以设计了塔身倾斜度监测报警系统。塔身倾斜度监测报警传感器是塔机移动基站1CX-E728的GPS天线1AT300,GPS天线1AT300安装在塔机回转中心,塔机回转中心坐标点就是本发明关注的塔机垂直度基点,如果塔机发生倾斜,塔机垂直度基准点就会发生偏移,因此,通过检测塔机回转中心基准点坐标的偏移量就可以判断塔机的倾斜度。系统组成:系统是由GIS监控管理平台、客户端T5820、交换机5HI-08、5G通讯模块CPEPRO、塔机智能监控终端S7-1500、触摸屏TCP7062Ti、GPS固定基站M300、固定基站GPS天线AT300、固定基站数传电台SZ02、塔机移动基站1CX-E728、移动基站GPS天线1AT300、移动基站数传电台1SZ02、交换机4HI-08、PLC控制器S7-1500、触摸屏TCP7062Ti、起升控制变频器AV930、小车变幅变频器AV930、左回转变频器AV930、右回转变频器AV930等组成,原理图如图10所示。
工作时,塔机移动基站1CX-E728的GPS天线1AT300不断接收来自北斗卫星发送来的位置信号,经过到的塔机移动基站1CX-E728的差分计算后得出GPS坐标值,同时塔机移动基站1CX-E728通过数传电台4SZ02在不断接收来自GPS固定基站M300的数传电台SZ02发送过来的固定基站GPS天线AT300接收到的坐标修正信号,塔机移动基站1CX-E728将修正后的坐标信号通过交换机4HI-08不断送给5G通讯模块CPEPRO,由5G通讯模块CPEPRO送给GIS监控管理平台、GIS监控管理平台根据程序设定不断将塔机移动基站1CX-E728送来的坐标值与原基准点坐标进行比较、计算,当发现现在的坐标值与原基准点坐标值位移超过设定范围,就会将报警信号通过ietemet及交换机5HI-08向客户端T5820报警;同时通过5G通讯模块CPEPRO及交换机4HI-08向塔机智能监控终端PLC控制器S7-1500报警,塔机智能监控终端PLC控制器S7-1500将报警信号送给触摸屏TCP7062Ti,由触摸屏TCP7062Ti进行显示、报警。如果发现现在的坐标值与原基准点坐标值位移超过设定范围很大,达到了报警、控制级别时,GIS监控管理平台在向客户端T5820报警的同时会通过5G通讯模块CPEPRO及交换机4HI-08向塔机监控终端PLC控制器S7-1500报警,塔机监控终端PLC控制器S7-1500将报警信号送给触摸屏TCP7062Ti,触摸屏TCP7062Ti会命令塔机监控终端PLC控制器S7-1500启动控制信号,自动禁止起升变频器ATV930、回转变频器ATV930、变幅变频器ATV930工作,从而预防安全事故发生;直到现在的坐标值与原基准点坐标值一致或者接近一致时才可以解除报警,塔机才可以正常工作。
7.塔机电子防摇摆功能的实现:
为了提高吊钩运动过程中的稳定性,本发明在小车变幅变频器ATV930回路里安装有防摇摆模块CX-FY400,以便快速抑制吊钩摆幅,达到快速吊运之目的;
系统组成:它是由客户端T5820、交换机5HI-08、internet网络、GIS监控管理平台的场地电子地图、5G通讯模块CPEPRO、塔机移动基站1CX-E728、GPS天线1AT300、力矩限制器CX-AV、重量传感器SQ-3、幅度传感器CX-FD001、小车移动基站2CX-E728、GPS天线2AT300、交换机2SZ02、网桥3MWB505、网桥4MWB505、交换机3HI-08、交换机4HI-08、风速传感器FS-CF、高度编码器GM58S10K6MA12WN、PLC控制器S7-1500、触摸屏TCP7062Ti、防摇摆模块CX-FY400、变幅小车变频器ATV930、现地遥控接收器JT-KP等组成,原理图如图11所示。
系统工作前要将吊钩在不同高度、不同吊重、不同速度、不同风速的工况下按照二次加速及二次减速工作原理对变幅小车速度控制进行程序设计,工作时使其加速-减速在时间上等于零,这样基本上就可以将吊钩在运动过程中的大部分摆幅消除掉;然后将程序固化到防摇摆模块CX-FY400里,塔机作业时一旦启用防摇摆模式,CX-FY400里程序就会自动控制变幅变频器ATV930进行防摇摆作业,达到抑制摆幅大小的作用,从而提高作业效率,二次加速及二次减速原理如图12所示,注:图12中V代表速度,T代表运行时间。
工作时,操作人员在客户端T5820上,通过GIS监控管理平台上的场地电子地图,对将要施工作业的塔机吊钩的工作启点坐标、交接点高度、吊钩运行终点坐标,交接点高度等进行设置,然后让其进入自动模式,此时客户端T5820会通过GIS监控管理平台会将设置结果通过internet网络、5G通讯模块CPEPRO、交换机4HI-08送给塔机PLC控制器S7-1500,塔机PLC控制器S7-1500又将命令送给触摸屏TCP7062Ti,由触摸屏TCP7062Ti根据客户端命令按照按照“先回转、后变幅”的流程对塔机PLC控制器S7-1500进行操作控制,当塔机移动基站1CX-E728的GPS天线1AT300与小车移动基站2CX-E728的GPS天线2AT300坐标在一条直线上时,回转动作自动停止,然后自动启动防摇摆模块CX-FY400工作,防摇摆模块根据终点坐标自动计算防摇摆距离,然后根据吊物重量、吊钩高度、运行速度、环境风速等自动调用防摇摆曲线,自动驱动变幅变频器ATV930进行防摇摆运行。
8.塔机臂架主动防碰撞报警功能的实现:
系统组成:它是由客户端T5820、交换机5HI-08、internet网络、GIS监控管理平台,5G通讯模块CPEPRO、交换机4HI-08、主动感应防碰撞传感器TD24GB003、防碰撞信号采集仪CX-KC16、数传电台3SZ02、PLC控制器S7-1500,触摸屏TCP7062Ti、回转变频器ATV930、起升变频器ATV930等组成。
为了预防塔机臂架与相邻塔机、周边建筑物、障碍物等发生碰撞而发生安全事故,在塔机臂架前部两侧、平衡臂尾部两侧等部位安装有主动感应防碰撞传感器TD24GB003,它是利用多普勒效应原理通过发出的微波信号主动检测周边建筑物、障碍物等反馈的相位差来判断塔机臂架与障碍物之间的距离,然后将采集到的信号送到防碰撞信号采集仪CX-KC16,由防碰撞信号采集仪CX-KC16将信号整理以后送给交换机4HI-08,交换机4HI-08再送给塔机监控终端PLCS7-1500,塔机监控终端PLCS7-1500再送给触摸屏TCP7062ti,触摸屏TCP7062ti经过分析比较,如果发现塔机臂架与相邻塔机、周边建筑物、障碍物等移动距离小于设定值时就会立刻向塔机监控终端PLCS7-1500发布控制命令,禁止塔机回转变频器ATV930继续向危险方向回转,同时禁止起升变频器ATV930继续起升作业,从而避免塔机臂架与相邻塔机、周边建筑物、障碍物等发生碰撞而发生重大安全事故。同时触摸屏TCP7062ti通过5G通讯模块CPEPRO将报警信号送到GIS监控管理云平台,GIS监控管理云平台立即通过internet网络向客户端T5820报警。触摸屏TCP7062ti在向塔机智能监控终端PLCS7-1500发布控制命令的同时,也会将报警信号通过交换机4送给数传电台3SZ02,数传电台3SZ02会将报警信号送给相邻塔机控制器PLC,如果是相邻塔机向我方塔机臂架移动相邻塔机控制器PLC会立刻对其回转变频器进行控制,禁止相邻塔机继续向塔机臂架靠拢;原理图如图13所示。
9.小车吊钩可视化功能的实现:
小车监控部分是由:恒力矩电源卷筒YLJ90-3/6、开关电源RS-75-12、无线充电器A-PWS-200-DC-70、交换机2005、移动基站2CX-E728、卫星定位天线AT300、数传电台2SZ02、网桥3MWB505、吊钩摄像机CX-SXJ02、网桥2MWB505等组成,工作原理图如图14所示。
工作时,恒力矩电源卷筒YLJ90-3/6将主机柜内AC220V电源通过卷筒送到小车上,恒力矩电机只向卷筒提供收线力矩,当小车向臂架头部移动时,是靠小车拉动绑扎在小车上的卷筒钢丝绳电缆进行旋转,卷筒带动恒力矩电机转子旋转,从而始终保持电缆的张力;电缆卷筒送来AC220V电源,一路到开关电源RS-75-12,由开关电源RS-75-12将其转换为DC12V电源为交换机2005、移动基站2CX-E728、GPS定位天线2AT300、数传电台2SZ02、网桥3MWB505、吊钩摄像机CX-SXJ02、网桥2MWB505等供电,一路AC220V到无线充电器A-PWS-200-DC-70为吊钩无线充电器B-PWS-200-DC-70充电。小车移动基站2CX-E728、GPS定位天线2AT300、数传电台2SZ02是负责小车移动定位及臂架回转角度定位的,卫星定位天线2AT300将接收到的差分信号送给小车移动基站2CX-E728,经过小车移动基站2CX-E728解算,将定位信号通过网桥3MWB505送给网桥4MWB505,然后经过交换机3送给PLC控制器S7-1500,供PLC控制器S7-1500使用;同时经过交换机4HI-08到5G通讯模块CPEPRO送到GIS监控管理云平台,由GIS监控管理云平台通过IETERNET送给客户端T5820,供客户端T5820使用。数传电台2SZ02是负责与固定基站通讯,不断接收固定基站M300发来的位置校准参数供移动基站CX-E728对GPS天线2AT300进行位置修正。吊钩摄像机CX-SXJ02是一个长焦距摄像机,可以监控0-400M视频信号,触摸屏TCP7062Ti可以根据吊钩高度编码器GM58S10K6MA12WN检测的吊钩高度信号对吊钩摄像机CX-SXJ02进行自动调焦调距,使小车下视频工况更清晰;吊钩摄像机CX-SXJ02将小车下视频信号经过网桥3MWB505送给网桥4MWB505然后经过交换机3HI-08一路送给录像机DS-7808N-K2存储、显示;一路经过交换机3HI-08到交换机4HI-08再经过5G通讯模块CPEPRO送到流媒体服务器DVSCAR-51、再由流媒体服务器DVSCAR-51送给拼接屏CB5503S、供操作人员监控、查询使用。网桥2MWB505是负责接收吊钩监控信息,并且将吊钩监控信息转送给网桥3MWB505;由网桥3MWB505送给网桥4MWB505。
10.智能吊钩功能的实现:
智能吊钩部分的组成:它是由4个防碰撞传感器DYP-A05-V1.0、2个人体感应传感器HC-SR501、2台网络摄像机BS-CA33-IP、1个水平传感器ZCT215FL-V1、1台交换机1005、一个单片机STM32F101C8T6、一个声光报警器LTE-1101J、一个无线充电接收器B-PWS-200-DC-70、一个电池电压传感器LTC2944、一个锂电池DLP-24V、一个控制继电器ZZ-0071、一台数传电台1SZ02等组成,原理图如图15所示。
工作时,人体感应传感器1HC-SR501和人体感应传感器2HC-SR501负责在吊钩快接近地面时负责感应吊钩下是否有人?如果感应到吊钩下有人,就会将感应信号送给单片机STM32F101C8T6、单片机STM32F101C8T6将感应距离及报警信号通过交换机1005送给网桥1MWB505,网桥1MWB505再将信号送给小车上的网桥2MWB505,网桥2MWB505经过小车上的交换机2005,交换机2005再转发给网桥3MWB505,网桥3MWB505再经过无线传输转给网桥4MWB505然后到达司机室交换机3HI-08,司机室交换机3HI-08将信号再转给PLC控制器S7-1500,PLC控制器S7-1500根据程序设定发布命令立即禁止起升变频器ATV930继续下降,从而保护吊钩下人的安全。水平传感器ZCT215FL-V1信号传输也是经过网桥1MWB505到网桥4MWB505再到PLC控制器S7-1500,PLC控制器S7-1500根据程序设定发布命令立即禁止起升变频器ATV930继续下降或者禁止提升的,从而预防违章作业。吊钩在上下运动时,4个防碰撞传感器DYP-A05-V1.0是在不断检测与周边障碍物之间的安全距离,一旦吊钩某一边与周边障碍物之间的安全距离小于设定值,该边的防碰撞传感器DYP-A05-V1.0就会输出一个开关量,开关量信号进入单片机STM32F101C8T6、单片机STM32F101C8T6将感应距离及报警信号通过交换机1005送给网桥1MWB505,网桥1MWB505再将信号送给小车上的网桥2MWB505,网桥2MWB505经过小车上的交换机2005,交换机2005再转发给网桥3MWB505,网桥3MWB505再经过无线传输转给网桥4MWB505然后到达司机室交换机3HI-08,司机室交换机3HI-08将信号再转给PLC控制器S7-1500,PLC控制器S7-1500根据程序设定发布命令立即禁止起升变频器ATV930继续提升,同时可以采取措施将吊钩从报警边反向移动,直到防碰撞传感器停止报警,从而保护吊钩的安全。网络摄像机1BS-CA33-IP、网络摄像机2BS-CA33-IP将采集的钩头下视频信号也是经过网桥1MWB505到网桥4MWB505再到司机室交换机3HI-08然后一路到录像机DS-7808N-K2、另外一路经过交换机4HI-08到5G通讯模块CPEPRO送到流媒体服务器DVSCAR-51、再由流媒体服务器DVSCAR-51送给拼接屏CB5503S、供操作人员监控、查询使用。为了保证吊钩设备电源不断电,本发明设计了无线充电接收器B-PWS-200-DC-70,当吊钩闲置时,PLC控制器S7-1500就会命令起升变频器将吊钩提起到臂架附近与小车无线充电器A-PWS-200-DC-70进行对接充电,充电器B-PWS-200-DC-70输出恒压恒流电源给锂电池DLP-24V,当电池充满后电池电压传感器LTC2944会将电池电压信号实时通过单片机STM32F101C8T6经过网桥1MWB505到网桥4MWB505送到PLC控制器S7-1500,PLC控制器S7-1500就会驱动起升变频器ATV930反转脱离充电,当锂电池DLP-24V欠压时,单片机STM32F101C8T6就会向PLC控制器S7-1500发出报警信号,PLC控制器S7-1500会通过5G通讯模块CPEPRO送到GIS监控管理云平台,GIS监控管理云平台再送到客户端T5820。当接到遥控器JT-KP工作指令时,吊钩随时就可以停止充电,投入到工作中。为了节约用电、延长电池使用寿命,本发明在吊钩上设计了智能电源控制电路,当吊钩不工作时,PLC控制器S7-1500会通过数传电台2SZ02发指令给吊钩数传电台1SZ02,吊钩数传电台1SZ02将指令送给控制继电器ZZ-0071断开,吊钩单片机STM32F101C8T6、人体感应传感器HC-SR501、水平传感器ZCT215FL-V1、网络摄像机BS-CA33-IP、声光报警器LTE-1101J、网桥1MWB505等均不得电,从而达到节约用电、延长电池使用寿命的目的。
11.周边建筑物、障碍物电子安全围栏的建立:
塔机周边建筑物、障碍物、高压线等电子安全围栏的建立,是通过现场GIS电子地图、数据库技术、5G通讯模块CPEPRO、塔机智能监控终端的PLC控制器S7-1500、触摸屏TCP7062Ti、塔机移动基站CX-E728、GPS定位天线AT300等联动报警;在云服务监控平台的GIS电子地图上,圈定建筑物、障碍物、高压线等禁止进入范围,当塔机臂架GPS天线2AT300或者小车GPS天线3AT300一旦驶入这个范围,就会触发GIS监控云服务平台的报警,GIS监控云平台就会通过5G通讯模块CPEPRO向塔机智能监控终端的PLC控制器S7-1500及触摸屏TCP7062Ti报警,触摸屏TCP7062Ti就会命令PLC控制器S7-1500停止回转变频器ATV930或者变幅变频器继续运行,从而保护塔机臂架或者小车上的吊钩不与周边建筑物、障碍物或者高压线发生碰撞。建模流程图如图16所示。
12.手机移动监控、查询功能的实现:
手机移动监控、查询是通过将云服务器平台与微信小程序绑定实现的;通过微信小程序可以实现对塔式起重机无人化控制的监控、查询等。
- 一种塔式起重机无人化控制系统
- 一种塔式起重机控制系统及智能塔式起重机