一种电梯自动化驱赶机构
文献发布时间:2023-06-19 10:55:46
技术领域
本发明涉及电梯装置技术领域,具体涉及一种电梯自动化驱赶机构。
背景技术
在一些建有几层养殖舍的大型养殖场中,如养猪场、养牛场和养羊场等牲畜养殖场,为了方便牲畜的转移,一般设有运送牲畜的专用电梯,比如在转移牲畜幼崽进行分栏时,或者运送牲畜出栏时等,通过电梯的运送能够很快将高层养殖舍的牲畜赶至低层,甚至直接送进牲畜运输车中。但现有的牲畜专用电梯未设有专门的自动化驱赶机构,导致养殖人员很难将牲畜赶出电梯,若是暴力驱赶牲畜可能会导致它们恐慌而找不到电梯出口,从而在电梯狭窄的空间内横冲直撞,这样就会容易发生安全事故,电梯的使用寿命也不能长久。因此,需要在这种运送牲畜的专用电梯内设置一种自动化驱赶机构用于快速安全地将牲畜赶出电梯,减少安全隐患。
发明内容
本发明为了解决上述问题,提供了一种电梯自动化驱赶机构。
本发明采用如下技术方案:
一种电梯自动化驱赶机构,所述驱赶机构本体包括轿厢后壁、底板、前板、剪叉结构和驱动装置,所述剪叉结构活动连接在底板上方的轿厢后壁和前板之间,剪叉结构包括呈剪叉状活动连接的若干连接臂和若干转接支轴,所述轿厢后壁上部设有纵向布置的固定导槽,轿厢后壁下部设有固定支轴,位于轿厢后壁一侧的连接臂分别活动连接在固定导槽和固定支轴上,所述前板上部设有与固定导槽位置对应的前板导槽,前板下部设有与固定支轴位置对应的前板支轴,位于前板一侧的连接臂分别活动连接在前板导槽和前板支轴上,所述驱动装置设在底板下方,驱动装置通过摆杆与固定支轴转动连接。
作为本发明的一种优选技术方案,所述连接臂包括活动连接在一起的主动臂、外后连接臂、内中连接臂、外中连接臂、内前连接臂和外前连接臂,所述主动臂下端活动连接在固定支轴上,所述外后连接臂的上端通过后导向件活动连接在固定导槽中,所述内中连接臂下端通过转接支轴活动连接外后连接臂下端,所述外中连接臂上端通过转接支轴活动连接主动臂上端,所述内前连接臂下端通过转接支轴活动连接外中连接臂下端,内前连接臂上端通过前导向件活动连接在前板导槽中,所述外前连接臂上端通过转接支轴活动连接内中连接臂上端,外前连接臂下端活动连接在前板支轴上,主动臂中间和外后连接臂中间、外中连接臂中间与内中连接臂中间、外前连接臂中间与内前连接臂中间分别通过转接支轴转动连接在一起,所述驱动装置设在底板下方,驱动装置通过摆杆与固定支轴转动连接。
作为发明的一种优选技术方案,所述驱动装置包括油缸、油管和泵站,所述底板下表面设有油缸支座和泵站支架,所述油缸支座设在靠近轿厢后壁一侧,所述油缸通过油缸支座固定在底板下方,油缸自带的活塞杆位于轿厢后壁一侧,底板位于轿厢后壁一侧设有通孔,所述摆杆活动连接在通孔中,摆杆的上端穿出底板上方与固定支轴转动连接,摆杆的下端穿出底板下方与活塞杆连接,所述泵站通过泵站支架固定连接在底板下方,油缸通过油管与泵站连接。
作为本发明的一种优选技术方案,所述底板下方设有收拢开关,所述收拢开关通过导线与油缸电性连接。
作为本发明的一种优选技术方案,所述前板底部前后两侧设有与底板抵接的滚轮。
本发明的有益效果是:
本发明结构简单,使用方便,通过设置与剪叉结构连接的前板,利用液压油缸作为驱动,控制剪叉结构的收拢和推出,从而方便地通过前板将猪、牛、羊等牲畜赶出电梯轿厢,既安全快速又省时省力。
附图说明
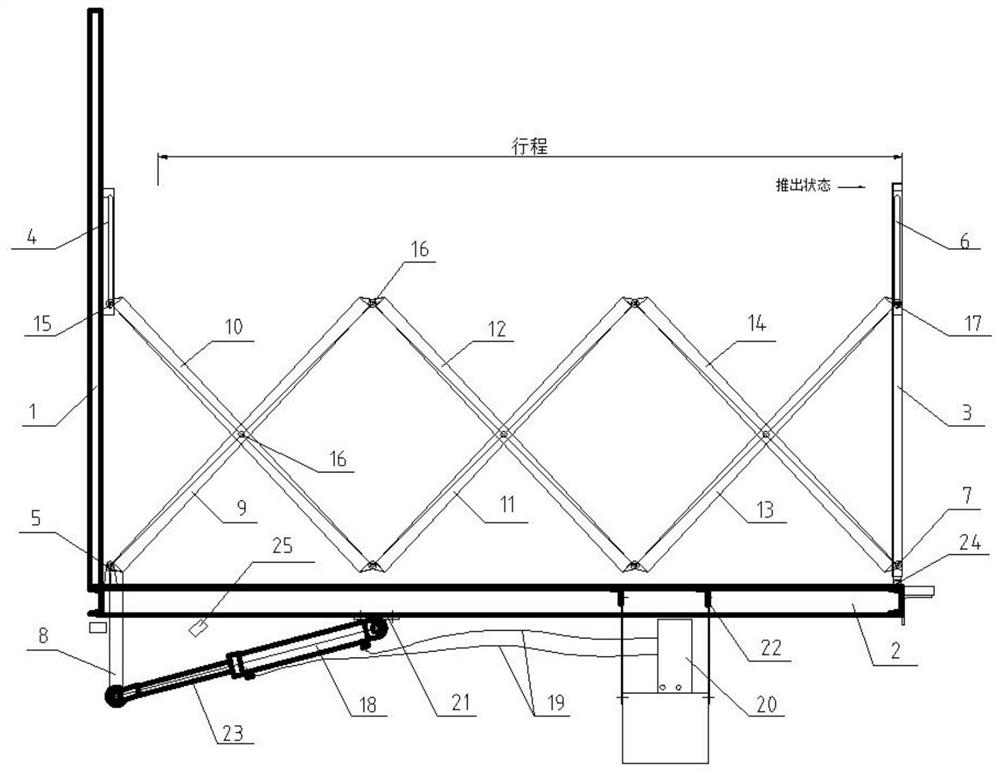
图1为本发明推开状态主视图;
图2为本发明收拢状态主视图。
图中符号说明:
1:轿厢后壁,2:底板,3:前板,4:固定导槽,5:固定支轴,6:前板导槽,7:前板支轴,8:摆杆,9:主动臂,10:外后连接臂,11:内中连接臂,12:外中连接臂,13:内前连接臂,14:外前连接臂,15:后导向件,16:转接支轴,17:前导向件,18:油缸,19:油管,20:泵站,21:油缸支座,22:泵站支架,23:活塞杆,24:滚轮,25:收拢开关。
具体实施方式
现在结合附图对发明行进一步详细说明。
如图1、图2所示,一种电梯自动化驱赶机构,所述驱赶机构本体包括轿厢后壁1、底板2、前板3、剪叉结构和驱动装置,所述剪叉结构活动连接在底板2上方的轿厢后壁1和前板3之间。剪叉结构包括呈剪叉状活动连接的若干连接臂和若干转接支轴,所述轿厢后壁2上部设有纵向布置的固定导槽4,轿厢后壁1下部设有固定支轴5,位于轿厢后壁1一侧的两根连接臂分别活动连接在固定导槽4和固定支轴5上,所述前板3上部设有与固定导槽4位置对应的前板导槽6,所述前板导槽6也呈纵向布置在前板3上部,使其与固定导槽4完全对称,前板3下部设有与固定支轴5位置对应的前板支轴7,位于前板3一侧的两根连接臂分别活动连接在前板导槽6和前板支轴7上,所述驱动装置设在底板2下方,驱动装置通过贯穿底板2的摆杆8与固定支轴5连接,从而通过驱动装置控制剪叉结构的收拢或推出,完成赶猪的作用。
进一步地,本实施例中的所述连接臂包括活动连接在一起的主动臂9、外后连接臂10、内中连接臂11、外中连接臂12、内前连接臂13和外前连接臂14,共6根连接臂,当然也可以根据轿厢的实际大小来设计连接臂的数量,且该数量应为偶数,以使得连接臂能两两组合形成剪叉状,如8根、10根。所述主动臂9下端活动连接在固定支轴5上,所述外后连接臂10的上端通过后导向件15活动连接在固定导槽4中,所述内中连接臂11下端通过转接支轴16活动连接外后连接臂10下端,所述外中连接臂12上端通过转接支轴16活动连接主动臂9上端,所述内前连接臂13下端通过转接支轴16活动连接外中连接臂12下端,内前连接臂13上端通过前导向件17活动连接在前板导槽6中,所述外前连接臂14上端通过转接支轴16活动连接内中连接臂11上端,外前连接臂14下端活动连接在前板支轴7上,主动臂9中间和外后连接臂10中间、外中连接臂12中间与内中连接臂11中间、外前连接臂14中间与内前连接臂13中间分别通过转接支轴16转动连接在一起,以上连接方式使得所有连接臂形成剪叉结构的整体形状。
具体地,当剪叉结构收拢时,所有连接臂均朝轿厢后壁1一侧靠拢,随着剪叉结构逐渐收拢,主动臂9上端逐渐往轿厢后壁1一侧靠拢,同时主动臂9中间通过转接支轴16带动外后连接臂10下端向轿厢后壁1一侧靠拢,外后连接臂10在主动臂9的带动下,其上端通过后导向件15逐渐滑移至固定导槽4的上端,从而使得外后连接臂10最终靠拢在轿厢后壁1上,而主动臂9上端和外后连接臂10下端分别通过转接支轴16带动外中连接臂12和内中连接臂11绕着位于中间的转接支轴16收拢,依次将拉力传递至与前板3连接的外前连接臂14和内前连接臂13,其中内前连接臂13完全靠拢时其上端通过前导向件17滑移至前板导槽6的上端;当想要剪叉结构展开推出时,通过摆杆8带动固定支轴5转动,迫使主动臂9上端远离轿厢1后壁,带动外后连接臂10通过后导向件15沿着固定导槽4下移,从而以转接支轴16为支点撑开主动臂9和外后连接臂10的剪叉形状,随着摆杆8的转动,推力依次传递至与前板3连接的外前连接臂14和内前连接臂13,从而将前板3推出,实现将牲畜从电梯轿厢中赶出的目的。
进一步地,所述驱动装置设在底板2下方,驱动装置通过摆杆8与固定支轴5连接。驱动装置包括油缸18、油管19和泵站20,所述底板2下表面设有油缸支座21和泵站支架22,所述油缸支座21设在靠近轿厢后壁1一侧,所述油缸18通过油缸支座21固定在底板2下方,油缸18自带的活塞杆23位于轿厢后壁1一侧,底板2位于轿厢后壁1一侧设有通孔,所述摆杆8活动连接在通孔中,摆杆8的上端穿出底板2上方与固定支轴5连接,摆杆8的下端穿出底板2下方与活塞杆23连接,所述泵站20通过泵站支架22固定连接在底板2下方,油缸18通过油管19与泵站20连接。所述底板2下方设有收拢开关25,所述收拢开关25通过导线与油缸18电性连接。这样通过摆杆8将转动力矩传递给剪叉结构,控制剪叉结构收拢或展开,当活塞杆23伸出远离油缸18时,此时的剪叉结构处于推出(展开)状态;当活塞杆23收缩靠近油缸18时,此时剪叉结构呈收拢状态。
所述前板3底部前后两侧设有与底板2抵接的滚轮24,通过滚轮24使得前板3移动更加顺畅,避免卡顿,还能减少前板3与底板2的摩擦,延长轿厢的使用寿命
最后应说明的是:这些实施方式仅用于说明本发明而不限制本发明的范围。此外,对于所属领域的技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引申出的显而易见的变化或变动仍处于本发明的保护范围之中。
- 一种电梯自动化驱赶机构
- 一种电梯自动化驱赶机构的驱动装置