一种堆垛机升降载货台
文献发布时间:2023-06-19 10:57:17
技术领域
本发明涉及堆垛机技术领域,尤其涉及一种堆垛机升降载货台。
背景技术
有轨巷道堆垛机技术广泛应用于立体仓库中,是一种在高层货架的窄巷道内作业的起重机,可大大提高仓库的面积和空间利用率,是自动化仓库的主要设备。
目前巷道类堆垛机的载货台只能取放固定尺寸的储物盒、纸箱和托盘等,载货台升降到指定货架高度后,载货台货叉伸出,将同等宽度的货箱移载到载货台上,然后由堆垛机沿着巷道将货箱搬运到指定位置,用同样的方法将货箱移载下来。
上述现有技术存在着以下缺点:传统堆垛机载货台只能取放固定尺寸的货物或者置放在托盘、储物箱之上的货物,对产品的包装要求必须是纸箱或者木箱等固定形态的打包形式,或者要求产品放在载具上,且要求每一种型号的产品和载具是一一对应的,需要增加载具回收辅助系统。对于尺寸变化的软包类货物,比如用编织袋包装的包裹,则不能实现货物直接在货架和堆垛机载货台之间的移载。
基于此,本案由此提出。
发明内容
本发明的目的在于提供一种堆垛机升降载货台,以实现非固定尺寸的软包类货物在立体仓库货架和堆垛机升降载货台之间的移载。
为了实现上述目的,本发明的技术方案如下:
一种堆垛机升降载货台,包括载货台框架,所述载货台框架上设有上层抱夹机构和下层输送机构,所述上层抱夹机构包括焊架和用于控制焊架升降的焊架升降驱动机构,焊架上通过轴承连接有丝杆一并设有用于驱动丝杆一的第一驱动部,丝杆一上连有两个相反旋向的丝杆螺母一,丝杆螺母一上固接有双向伸缩机械手,两个双向伸缩机械手相对设置;所述下层输送机构包括输送带和输送带传动系统。
进一步的,所述焊架与载货台框架之间设有直线导向机构。
进一步的,所述焊架升降驱动机构包括丝杆二和用于驱动丝杆二的第二驱动部,第二驱动部固定在载货台框架上,丝杆二通过轴承连接在载货台框架上,所述丝杆二上设有与焊架固接的丝杆螺母二。
进一步的,所述焊架上固定有若干个与丝杆一平行的导轨一,所述双向伸缩机械手滑动连接在导轨一上。
进一步的,所述输送带传动系统包括设置在载货台框架上方的第三驱动部和主动轴,第三驱动部用于驱动主动轴,输送带上设有从动轴,所述主动轴和从动轴上均设有同步轮,主动轴上的同步轮和从动轴上的同步轮通过同步带传动,所述同步带和同步轮沿载货台框架的架体布置。
进一步的,所述输送带有多条,相邻两条输送带之间设有流利条装置。
进一步的,所述载货台框架上设有流利条升降驱动机构。
本发明的优点在于:该技术的双向同步抱夹驱动系统,能实现一定尺寸范围内软包货物在巷道类堆垛机升降载货台和货架之间的取放,同时该技术的双层机构能实现货物在X+、X-、Y+和Y-四个方向上的移动。
附图说明
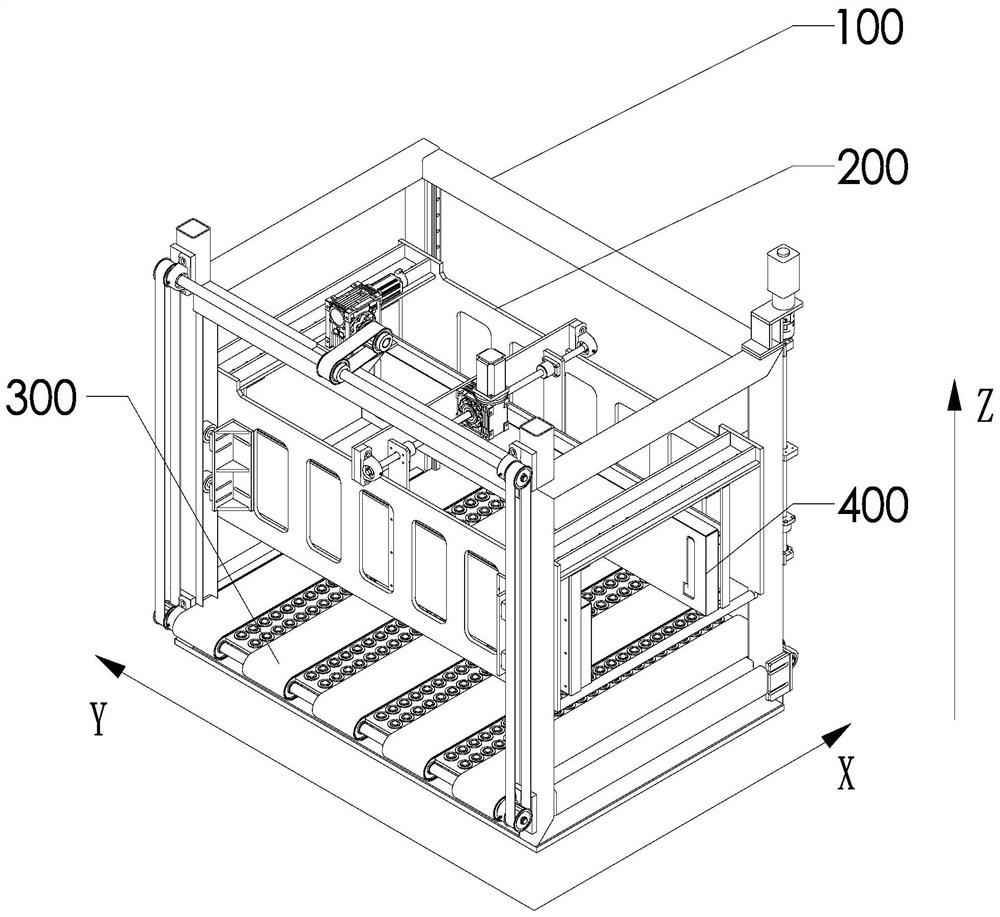
图1本发明在实施例中的三维构造示意图;
图2为实施例中载货台框架的构造示意图;
图3 为实施例中抱夹系统的构造示意图;
图4为图3的上视示意图;
图5为实施例中输送系统的构造示意图;
图6为图5的下视示意图;
图7为实施例中双向伸缩机械手的构造示意图;
图8为实施例装置处在工作状态示意图;
标号说明
100.载货台框架,101.C型槽,102.导轨二;
200.上层抱夹机构,201.焊架,202.导轮,203滑块,204.第一驱动部,205.导轨一,206.安装板,207.丝杆一,208.丝杆螺母一,209.丝杆二,210.第二驱动部,211.丝杆螺母二;
300.下层输送机构,301.输送带 ,302.流利条装置,303.同步带,304.流利条升降驱动装置,305.第三驱动部,306.主动轴,307.从动轴,308.同步轮;
400.双向伸缩机械手,401.拨叉-拽 ,402.拨叉-推。
具体实施方式
以下结合实施例对本发明作进一步详细描述。
本实施例提出一种堆垛机升降载货台,如图1所示,用于实现非固定尺寸软包包装的商品在立体仓库巷道类堆垛机上搬运,包括载货台框架100、下层输送机构300、上层抱夹机构200。下文中的X向和Y向以图1中指示的方向为准。
如图3所示,上层抱夹机构200包括U型的焊架201和用于控制焊架201升降的焊架升降驱动机构,焊架201的中部通过轴承连接有丝杆一207并设有用于驱动丝杆一207的第一驱动部204,丝杆一207沿X向布置,第一驱动部204采用带减速器的伺服电机,并安装在丝杆一207的中间。丝杆一207上位于第一驱动部204的两侧连有两个相反旋向的丝杆螺母一208,丝杆螺母一208上通过安装板206固接有双向伸缩机械手400。通过丝杆一207,实现两个双向伸缩机械手400同步靠近或远离,实现抱夹和松开动作。
该双向同步抱夹驱动系统能实现一定尺寸范围内软包货物在巷道类堆垛机升降载货台和货架之间的取放,同时相比于传统的方式,这种功能能很好的保证物料在货仓和载货台之间的运转中自身的位置能始终居中放置,尤其是软包的货物,用传统的方式很难保证其位置在移载过程始终居中。
如图4所示,为使得双向伸缩机械手400的靠近或远离运动及双向伸缩运动更加稳定,本实施例在焊架201Y向的两端均设有平行于丝杆一207的导轨一205,双向伸缩机械手400与导轨一205之间通过安装板206实现滑动连接,即每一个双向伸缩机械手400与焊架201之间通过三块安装板206实现连接。
如图2至4所示,焊架201与载货台框架100之间设有直线导向机构,即在焊架201X向的两侧分别设有导轮202和滑块203,在载货台框架100上设有与相配合的C型槽101和与滑块203相配合的导轨二102。这样的设计能减少升降动作对于机加工的精度要求。本实施例的焊架升降驱动机构包括丝杆二209和用于驱动丝杆二209的第二驱动部210,第二驱动部210采用电机并固定在载货台框架100上,丝杆二209通过轴承连接在载货台框架100上,所述丝杆二209上设有与焊架201固接的丝杆螺母二211。本实施例丝杆二209的长度需小于载货台框架100的高度,避免上层抱夹机构200与下层输送机构300之间发生干涉。
所述下层输送机构300包括输送带301和输送带传动系统,输送带301能双向将货物从堆垛机缓存区移动到载货台或者将货物从载货台移动到缓存区,相比于依靠机械手推动物料运转,不但节省了空间,且针对摩擦力大,容易形变的物料,更容易准确而轻松的在两个位置之间来回运转。如图5和6所示,本实施例输送带传动系统包括设置在载货台框架100上方的第三驱动部305和主动轴306,第三驱动部305采用带减速机的电机,主动轴306通过轴承连接在载货台框架100上。第三驱动部305用于驱动主动轴306转动(两者之间的传动可通过齿轮,也可通过图中所示同步轮、同步带传动)。输送带301上设有从动轴307,通过从动轴307带动输送带301转动,所述主动轴306和从动轴307的两端均设有同步轮308,主动轴306上的同步轮308和从动轴307上的同步轮308通过同步带303传动。
本实施例的同步带303、同步轮308及主动轴306沿载货台框架100的架体布置,并将驱动机构设置在载货台框架100的上方,这样可使得传送区域更加简洁,减少干涉。
进一步的,本实施例输送带分成多条301,相邻两条输送带301之间设有流利条装置302,流利条装置302用于减少货物和升降载货台之间的摩擦。同时由于传送带的输送方向和双向伸缩机械手400的伸缩方向一般都不在一个方向上,本实施例在载货台框架100的顶部还设有流利条升降驱动机构304。例如在本实施例装置中,传动带沿X向输送,双向伸缩机械手400沿Y向伸缩,即货物与载货台之间的摩擦包括X轴和Y轴两个方向的摩擦。当货物发生Y轴移载时,则流利条升高,避免传送带被横向摩擦;当货物发生X轴移载时,流利条下降,货物和传送带完全接触,被传送带传送,相比较传统堆垛机升降台通过旋转货叉来达到改变传送方向的设计,本实施例结构更加简单。
本实施例的双向伸缩机械手400为现有技术,为三级结构(也可以更多级或者二级),且内置驱动装置以实现双向伸缩,双向伸缩机械手400的第一级用于与焊架201实现固定,第二、三级用于Y轴方向的双向运动。同时,在双向伸缩机械手400的Y向两端,还设有拨叉,拨叉与双向伸缩机械手400之间通过轴承连接,并有双向伸缩机械手400的内置电机控制,实现旋转,每当双向伸缩机械手400伸缩到指定位置后,拨叉旋转90度,当双向伸缩机械手400进行下一个动作(升或缩)后,货物被拨叉拽或推到对应的位置。
本实施例的装置主要应用于堆垛机,使用原理如下所述,
堆垛机取货出库:假设堆垛机要取的货物为A0,堆垛机行走到指定位置,载货台升降到指定高度。流利条升降驱动机构304工作,流利条上升;同时,焊架升降驱动机构工作,将焊架201下降到工作位;两个双向伸缩机械手400同步工作,向Y+方向伸出到位,如图8所示;第一驱动部204通过丝杆一207和丝杆螺母一208带动两侧双向伸缩机械手400同步将货物A0抱夹;拨叉-拽401旋转90度到达阻挡位;双向伸缩机械手400工作,带着货物A0沿着流利条向Y-方向移动,进入到载货台中;拨叉-拽401旋转收回,同时两侧双向伸缩机械手400松开;焊架升降驱动机构工作带动焊架201上升回到避让位;流利条升降驱动机构304带动流利条装置302下降,货物AO被放置在输送带301上;输送带传动系统工作,沿着X+方向,将货物传送到堆垛机的缓存区。
堆垛机存货入库:假设堆垛机要存取的货物为A1,A1在缓存区通过输送带301向X-方向移动,同时载货台输送带301工作,对接缓存区的货物A1,将A1从缓存区传送到载货台上;堆垛机行走到指定位置,载货台带着货物A1升降到指定高度;流利条升降驱动机构304工作,流利条上升;焊架升降驱动机构带动下降到工作位;第一驱动部204通过丝杆一207和丝杆螺母一208带动两侧双向伸缩机械手400同步将货物A1抱夹;同时拨叉-推402旋转90度到达阻挡位;双向伸缩机械手400工作,带着A1向Y+方向伸出到位;将A1推到货位中,双向伸缩机械手400同步向两侧运动松开A1,同时拨叉-推402复位;双向伸缩机械手400工作,缩回到原位。
上述实施例仅用于解释说明本发明创造的构思,而非对本发明创造权利保护的限定,凡利用此构思对本发明创造进行非实质性的改动,均应落入本发明创造的保护范围。
- 一种堆垛机升降载货台
- 一种堆垛机升降载货台