一种油动无人机控制方法及装置
文献发布时间:2023-06-19 11:06:50
技术领域
本发明涉及无人机技术领域,尤其涉及一种油动无人机控制方法及装置。
背景技术
目前随着互联网技术的飞速发展,网购成为越来越多人的选择,随之而来的是快递业务的快速发展。传统的快递派送模式有许多问题难以解决,物流派送最后一公里瓶颈就是快递企业面对的一个普遍问题,此外,派送时效和终端用户体验也是快递企业面临的主要问题。
在网购商品调研中发现,大部分包裹是重量轻的小件包裹,小部分是不太重的中件包裹,重量重的大尺寸包裹很少,怎样才能将这些中、小件包裹快速、安全的送到客户手中,并取得广大客户的满意,是目前亟需解决的一个技术问题,现有的快递无人机具有运送速度快、投放精准的优点,能快速地将中小件包裹运送到客户手中。
在快递无人机在通过摇臂夹持包裹载重后,起飞、转弯、急停等动作都会引起包裹的惯性运动,进而对快递无人机产生一定的反作用力,使快递无人机难以控制平衡,从而飞行不平稳,容易导致快递无人机与周围物体相撞,造成安全事故。
发明内容
本发明的目的在于提供一种油动无人机控制方法及装置,旨在解决现有技术中的快递无人机在通过摇臂夹持包裹载重后,起飞、转弯、急停等动作都会引起包裹的惯性运动,进而对快递无人机产生一定的反作用力,使快递无人机难以控制平衡,从而飞行不平稳,容易导致快递无人机与周围物体相撞,造成安全事故的技术问题。
为实现上述目的,本发明采用的一种油动无人机控制装置,包括机体、摇臂、载物箱、摇臂减震装置和机体减震装置;所述摇臂与所述机体滑动连接,并数量为多个,分别位于所述机体的两侧,所述载物箱与所述摇臂卡接,并位于所述摇臂远离所述机体的底端,所述摇臂减震装置与所述机体滑动连接,并与所述摇臂固定连接,且位于所述机体和所述摇臂之间,所述机体减震装置与所述机体滑动连接,并与所述摇臂减震装置固定连接,且位于所述机体远离所述摇臂的一端;所述摇臂减震装置包括阻尼器和减震弹簧,所述阻尼器与所述机体滑动连接,并位于所述机体远离所述摇臂的一端;所述减震弹簧与所述阻尼器抵接,并与所述摇臂固定连接,且位于所述阻尼器和所述摇臂之间。
其中,所述阻尼器包括活塞杆和液压缸,所述活塞杆与所述机体固定连接,并位于所述机体远离所述摇臂的内部,且朝向所述摇臂的方向;所述液压缸与所述机体滑动连接,并与所述活塞杆滑动连接,且与所述减震弹簧抵接,所述液压缸位于所述减震弹簧和所述活塞杆之间。
其中,所述阻尼器还包括阻尼控制阀,所述阻尼控制阀与所述液压缸固定连接,并位于所述液压缸靠近所述活塞杆的内部,且朝向所述活塞杆的方向。
其中,所述摇臂减震装置还包括储油缸和塞头,所述储油缸与所述液压缸滑动连接,并与所述减震弹簧抵接,且围设在所述液压缸的外周,朝向所述摇臂的方向;所述塞头与所述储油缸滑动连接,并与所述减震弹簧固定连接,且与所述摇臂固定连接,所述塞头位于所述减震弹簧和所述摇臂之间,并位于所述液压缸和所述储油缸之间。
其中,所述摇臂减震装置还包括关节轴承,所述关节轴承与所述塞头转动连接,并与所述摇臂固定连接,且位于所述塞头靠近所述摇臂的一侧。
其中,所述机体具有滑槽,所述滑槽位于所述机体靠近所述摇臂的侧面;所述机体减震装置包括滑块和减震组件,所述滑块与所述机体滑动连接,并通过所述减震弹簧和所述阻尼器与所述摇臂滑动连接,且位于所述机体远离所述摇臂的内部,所述减震组件与所述机体滑动连接,并与所述滑块弹性连接,且位于所述滑块和所述机体之间。
其中,所述减震组件包括伸缩弹簧和气缸,所述伸缩弹簧与所述滑块固定连接,并位于所述滑块远离所述阻尼器的表面;所述气缸与所述机体滑动,并与所述伸缩弹簧抵接,且位于所述机体和所述伸缩弹簧之间。
其中,所述油动无人机控制装置还包括反冲喷头,所述反冲喷头与所述载物箱固定连接,并位于所述载物箱靠近所述摇臂的侧壁,且朝向远离所述载物箱的方向。
本发明还包括一种油动无人机控制方法,包括如下步骤:
无人机飞行时转向,摇臂受到载重物的侧向推力,并发生侧向位移;
关节轴承转动带动所述摇臂进行圆周摆动,对塞头施加水平推力;
减震弹簧吸收所述塞头的推力,同时液压缸对所述塞头进行抵接,抑制所述减震弹簧吸收压力后反向回弹力;
无人机平稳飞行。
本发明的一种油动无人机控制方法及装置,当无人机转弯减速时,所述载物箱对所述摇臂施加侧向压力,驱使所述摇臂与所述机体发生侧向位移,并由所述关节轴承带动作轴向圆周摆动,且对所述塞头施加水平推力,驱使所述减震弹簧吸收所述塞头带来的压力,同时所述塞头对所述液压缸传递压力,驱使所述液压缸朝向所述活塞杆的方向挤压内部的液压油对冲击进行减缓,位于所述机体相对一侧的所述液压缸通过所述阻尼控制阀吸入液压油,减缓所述液压缸与所述活塞杆的分离速度,进而抑制所述减震弹簧吸收压力后反弹的振动,如此能在无人机进行转向减速时,减小载重物的惯性对所述机体带来的冲击,进而使无人机保持平稳飞行。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
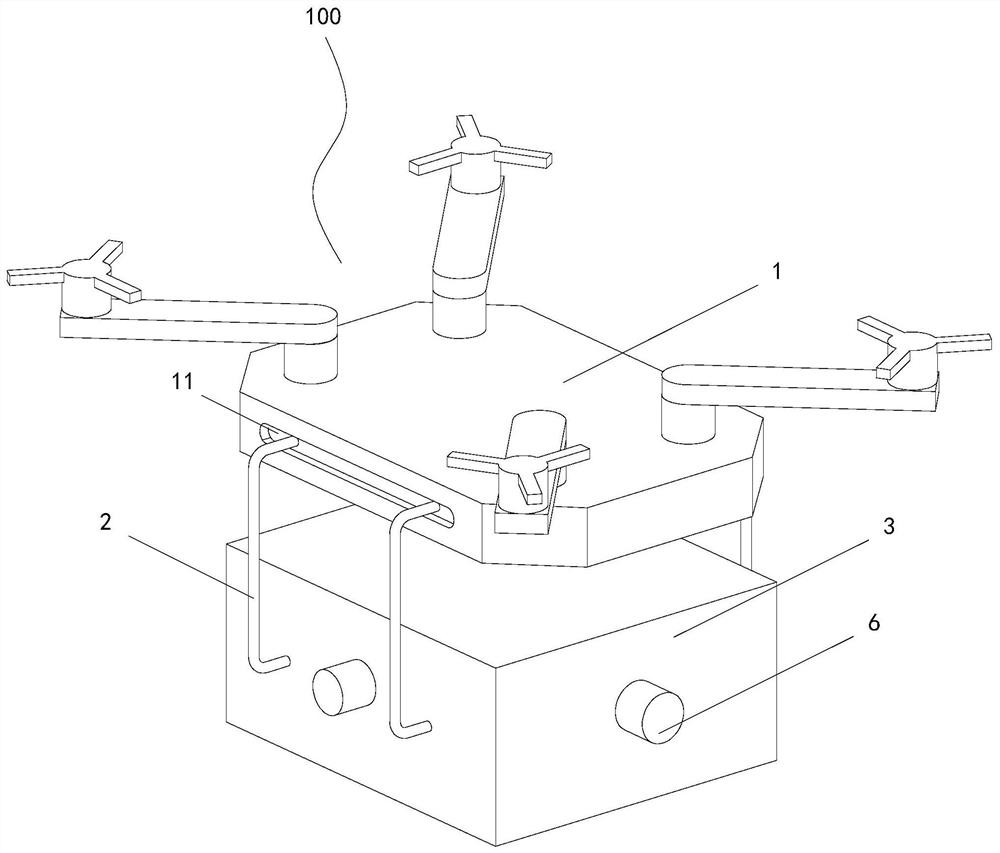
图1是本发明的无人机载物飞行的示意图。
图2是本发明的摇臂减震装置的结构示意图。
图3是本发明的机体减震装置的结构示意图。
图4是本发明的油动无人机控制方法的流程图。
图中:1-机体、2-摇臂、3-载物箱、4-摇臂减震装置、5-机体减震装置、6-反冲喷头、11-滑槽、41-阻尼器、42-减震弹簧、43-储油缸、44-塞头、45-关节轴承、51-滑块、52-减震组件、100-油动无人机控制装置、411-活塞杆、412-液压缸、413-阻尼控制阀、521-伸缩弹簧、522-气缸。
具体实施方式
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
在本发明的描述中,需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
在本实施方式的第一实施例:
请参阅图1和图2,本发明提供了一种油动无人机控制装置100,包括机体1、摇臂2、载物箱3、摇臂减震装置4和机体减震装置5;所述摇臂2与所述机体1滑动连接,并数量为多个,分别位于所述机体1的两侧,所述载物箱3与所述摇臂2卡接,并位于所述摇臂2远离所述机体1的底端,所述摇臂减震装置4与所述机体1滑动连接,并与所述摇臂2固定连接,且位于所述机体1和所述摇臂2之间,所述机体减震装置5与所述机体1滑动连接,并与所述摇臂减震装置4固定连接,且位于所述机体1远离所述摇臂2的一端;所述摇臂减震装置4包括阻尼器41和减震弹簧42,所述阻尼器41与所述机体1滑动连接,并位于所述机体1远离所述摇臂2的一端;所述减震弹簧42与所述阻尼器41抵接,并与所述摇臂2固定连接,且位于所述阻尼器41和所述摇臂2之间。
进一步地,所述阻尼器41包括活塞杆411和液压缸412,所述活塞杆411与所述机体1固定连接,并位于所述机体1远离所述摇臂2的内部,且朝向所述摇臂2的方向;所述液压缸412与所述机体1滑动连接,并与所述活塞杆411滑动连接,且与所述减震弹簧42抵接,所述液压缸412位于所述减震弹簧42和所述活塞杆411之间。
进一步地,所述阻尼器41还包括阻尼控制阀413,所述阻尼控制阀413与所述液压缸412固定连接,并位于所述液压缸412靠近所述活塞杆411的内部,且朝向所述活塞杆411的方向。
进一步地,所述摇臂减震装置4还包括储油缸43和塞头44,所述储油缸43与所述液压缸412滑动连接,并与所述减震弹簧42抵接,且围设在所述液压缸412的外周,朝向所述摇臂2的方向;所述塞头44与所述储油缸43滑动连接,并与所述减震弹簧42固定连接,且与所述摇臂2固定连接,所述塞头44位于所述减震弹簧42和所述摇臂2之间,并位于所述液压缸412和所述储油缸43之间。
进一步地,所述摇臂减震装置4还包括关节轴承45,所述关节轴承45与所述塞头44转动连接,并与所述摇臂2固定连接,且位于所述塞头44靠近所述摇臂2的一侧。
在本实施例中,所述机体1为旋翼式无人机,具有分布于机身四个端部的四个旋翼轴,通过每个旋翼轴上的电机带动端部的旋翼旋转,从而产生推力,所述机体1内具有信号接收器和控制器等多种元器件,可保证飞行路线的可控和防碰撞,所述摇臂2为倒L形摇臂2,所述摇臂2的水平段与所述机体1接触,并少部分伸入所述机体1内,被转动轴承左右滑动方向固定,作水平伸缩和左右摆动,所述摇臂2的数量为四个,左右分别具有两个,并相对设置,所述摇臂2的竖直段朝向下,并在端部连接有扣板,且通过扣板与所述载物箱3可拆卸连接,所述载物箱3内放置有快递件,通过拆卸所述摇臂2的扣板来取放所述载物箱3,所述活塞杆411固定在机架的内部的安装槽内,所述液压缸412与所述活塞杆411滑动连接,使所述活塞杆411在所述液压缸412的内部直线滑动,通过所述活塞杆411的杆头与所述液压缸412的内臂摩擦滑动,所述活塞杆411和所述液压缸412之间存储有液压油,所述储油缸43与所述机体1的安装槽固定,并围设在所述液压缸412的外表面,与所述液压缸412滑动连接,所述液压缸412和所述储油缸43之间通过所述阻尼控制阀413连通,进而所述活塞杆411挤压所述液压缸412内的液压油,通过所述阻尼控制阀413进入所述储油缸43内,反之则使所述储油缸43内的液压油通过所述阻尼控制阀413进入所述液压缸412内,所述储油缸43和所述液压缸412之间连接有所述减震弹簧42,所述减震弹簧42与固定的所述储油缸43的缸底连接,所述塞头44和所述关节轴承45连接在所述减震弹簧42和所述摇臂2之间,所述塞头44与所述储油缸43的内壁滑动连接,并整个固定在所述减震弹簧42的弹簧面上,使所述摇臂2和所述关节轴承45传递的力被均匀地分散到所述减震弹簧42上,使所述减震弹簧42受力更平稳,所述关节轴承45与所述塞头44转动连接,转动方向朝向与靠近的所述机体1的侧面平行,进而使所述载物箱3带动所述摇臂2转动时,不会受到所述机体1和所述塞头44对所述摇臂2的水平阻力,只会绕所述液压缸412的中心线转动,如此,当无人机转弯减速时,所述载物箱3对所述摇臂2施加侧向压力,驱使所述摇臂2与所述机体1发生侧向位移,并由所述关节轴承45带动作轴向圆周摆动,且对所述塞头44施加水平推力,驱使所述减震弹簧42受压,并吸收所述塞头44带来的压力,同时所述塞头44对所述液压缸412传递压力,驱使所述液压缸412朝向所述活塞杆411的方向挤压内部的液压油,通过挤压液压油的过程对冲击进行减缓,并使液压油通过所述阻尼控制阀413进入所述储油缸43内,位于所述机体1相对一侧的所述液压缸412通过所述阻尼控制阀413吸入液压油,减缓所述液压缸412与所述活塞杆411的分离速度,进而抑制所述减震弹簧42吸收压力后反弹的振动,如此能在无人机进行转向减速时,减小载重物的惯性对所述机体1带来的冲击,进而使无人机保持平稳飞行。
在本实施方式的第二实施例:
请参阅图1、图2和图3,本发明提供了一种油动无人机控制装置100,包括机体1、摇臂2、载物箱3、摇臂减震装置4和机体减震装置5;所述摇臂2与所述机体1滑动连接,并数量为多个,分别位于所述机体1的两侧,所述载物箱3与所述摇臂2卡接,并位于所述摇臂2远离所述机体1的底端,所述摇臂减震装置4与所述机体1滑动连接,并与所述摇臂2固定连接,且位于所述机体1和所述摇臂2之间,所述机体减震装置5与所述机体1滑动连接,并与所述摇臂减震装置4固定连接,且位于所述机体1远离所述摇臂2的一端;所述摇臂减震装置4包括阻尼器41和减震弹簧42,所述阻尼器41与所述机体1滑动连接,并位于所述机体1远离所述摇臂2的一端;所述减震弹簧42与所述阻尼器41抵接,并与所述摇臂2固定连接,且位于所述阻尼器41和所述摇臂2之间。
进一步地,所述机体1具有滑槽11,所述滑槽11位于所述机体1靠近所述摇臂2的侧面;所述机体减震装置5包括滑块51和减震组件52,所述滑块51与所述机体1滑动连接,并通过所述减震弹簧42和所述阻尼器41与所述摇臂2滑动连接,且位于所述机体1远离所述摇臂2的内部,所述减震组件52与所述机体1滑动连接,并与所述滑块51弹性连接,且位于所述滑块51和所述机体1之间。
进一步地,所述减震组件52包括伸缩弹簧521和气缸522,所述伸缩弹簧521与所述滑块51固定连接,并位于所述滑块51远离所述阻尼器41的表面;所述气缸522与所述机体1滑动,并与所述伸缩弹簧521抵接,且位于所述机体1和所述伸缩弹簧521之间
在本实施例中,所述机体1的两个侧面分别具有供所述滑块51滑动的所述滑槽11,所述滑块51连接所述活塞杆411和所述储油缸43,并带动所述摇臂2进行水平滑动,所述气缸522固定在所述滑块51的前后两侧,所述滑块51与所述气缸522滑动连接,并可伸入所述气缸522的内部,所述伸缩弹簧521连接在所述滑块51和所述气缸522之间,对所述滑块51施加回弹力,同时挤压所述气缸522内部的气体,驱使所述气缸522从侧面喷出气体进行减压,如此当所述油动无人机控制装置100起飞和直线减速使,所述载物箱3由于惯性水平向前移动,进而对所述滑块51施加向前的推力,所述滑块51与所述伸缩弹簧521抵接,受到所述伸缩弹簧521的回弹力使所述滑块51减速滑动,同时与所述气缸522滑动连接,挤压所述气缸522内的气体,对所述滑块51施加反作用力,减缓所述滑块51的滑动速度,进而减少所述伸缩弹簧521受到的水平推力,进而使无人机能够平稳飞行。
在本实施方式的第三实施例:
请参阅图1和图2,本发明提供了一种油动无人机控制装置100,包括机体1、摇臂2、载物箱3、摇臂减震装置4和机体减震装置5;所述摇臂2与所述机体1滑动连接,并数量为多个,分别位于所述机体1的两侧,所述载物箱3与所述摇臂2卡接,并位于所述摇臂2远离所述机体1的底端,所述摇臂减震装置4与所述机体1滑动连接,并与所述摇臂2固定连接,且位于所述机体1和所述摇臂2之间,所述机体减震装置5与所述机体1滑动连接,并与所述摇臂减震装置4固定连接,且位于所述机体1远离所述摇臂2的一端;所述摇臂减震装置4包括阻尼器41和减震弹簧42,所述阻尼器41与所述机体1滑动连接,并位于所述机体1远离所述摇臂2的一端;所述减震弹簧42与所述阻尼器41抵接,并与所述摇臂2固定连接,且位于所述阻尼器41和所述摇臂2之间。
进一步地,所述油动无人机控制装置100还包括反冲喷头6,所述反冲喷头6与所述载物箱3固定连接,并位于所述载物箱3靠近所述摇臂2的侧壁,且朝向远离所述载物箱3的方向。
在本实施例中,所述反冲喷头6安装在所述载物箱3的四个侧面上,并由控制器控制,当所述油动无人机控制装置100受到减速命令时,相应的所述反冲喷头6工作,并朝向运动方向相同的方向喷出气体,使所述载物箱3受到反作用力,进而抵消部分所述载物箱3的惯性作用力,使所述载物箱3保持平稳减速,进而减小对无人机的影响,使无人机能平稳飞行。
请参阅图4,一种油动无人机控制方法,包括如下步骤,
S801:无人机飞行时转向,摇臂2受到载重物的侧向推力,并发生侧向位移;
S802:关节轴承45转动带动所述摇臂2进行圆周摆动,对塞头44施加水平推力;
S803:减震弹簧42吸收所述塞头44的推力,同时液压缸412对所述塞头44进行抵接,抑制所述减震弹簧42吸收压力后反向回弹力;
S804:无人机平稳飞行。
在本实施方式中,当无人机转弯减速时,所述载物箱3对所述摇臂2施加侧向压力,驱使所述摇臂2与所述机体1发生侧向位移,并由所述关节轴承45带动作轴向圆周摆动,且对所述塞头44施加水平推力,驱使所述减震弹簧42受压,并吸收所述塞头44带来的压力,同时所述塞头44对所述液压缸412传递压力,驱使所述液压缸412朝向所述活塞杆411的方向挤压内部的液压油,通过挤压液压油的过程对冲击进行减缓,并使液压油通过所述阻尼控制阀413进入所述储油缸43内,位于所述机体1相对一侧的所述液压缸412通过所述阻尼控制阀413吸入液压油,减缓所述液压缸412与所述活塞杆411的分离速度,进而抑制所述减震弹簧42吸收压力后反弹的振动,如此能在无人机进行转向减速时,减小载重物的惯性对所述机体1带来的冲击,进而使无人机保持平稳飞行。
以上所揭露的仅为本发明一种较佳实施例而已,当然不能以此来限定本发明之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本发明权利要求所作的等同变化,仍属于发明所涵盖的范围。
- 一种油电混动无人机的供电装置和油电混动无人机
- 一种油电混动多旋翼无人机控制方法