采煤机专用拖缆系统控制方法
文献发布时间:2023-06-19 11:08:20
技术领域
本发明涉及一种采煤机拖缆装置的自动控制方法。
背景技术
采煤机供电电缆是采煤机的动力来源。采煤机作业时,拖缆装置拖曳采煤机供电电缆跟随采煤机机身行走以保证采煤机的供电。由于工况复杂,采煤机供电电缆易发生堆叠、脱出电缆槽等异常情况,甚至有被卡断的风险,严重影响生产安全和生产效率,因而通常需要煤矿工人对采煤机供电电缆进行实时监控和调整,造成了人力和物力上的大量浪费,而且这种情况在薄煤层采煤作业中尤为突出。
发明内容
本发明的目的是提供一种采煤机专用拖缆系统控制方法,解决拖缆过程中供电电缆堆叠、脱出电缆槽甚至被卡断等问题,实现采煤机工作过程中拖缆的高可靠性和自动化。
本发明的主要技术方案有:
一种采煤机专用拖缆系统控制方法,包括以下几个控制阶段:
S1、拖缆启动阶段:采煤机牵引启动前,通过拖缆变频器控制拖缆电机拖动拖缆装置,对采煤机供电电缆进行收紧,直至拖缆装置处的供电电缆的张力检测值进入预设的安全运行张力范围内;
S2、拖缆运行阶段:采煤机牵引启动,拖缆电机启动,通过控制拖缆电机的转速,控制拖缆装置的移动速度与采煤机牵引速度的比值在设定范围内,同时保持拖缆装置处的供电电缆的张力检测值处于所述安全运行张力范围内,并控制拖缆电机的转向随采煤机牵引方向的改变而改变;
S3、拖缆收尾阶段:采煤机先停止牵引,然后控制所述拖缆装置放松所述供电电缆,直至采煤机机身处的供电电缆的张力检测值进入预设的安全运行张力范围内。
在所述拖缆运行阶段,在采煤机上行过程中,拖缆变频器的控制策略优选以转矩控制为主、速度监控为辅,当所述拖缆装置处于超速工作状态时,减小所述拖缆变频器的输出转矩;当所述拖缆装置处于欠速工作状态时,增大所述拖缆变频器的输出转矩。
设置采煤机牵引速度为基准速度V0,当所述拖缆装置的移动速度在V0的49%-51%范围内时,为正常工作状态,当所述拖缆装置的移动速度高于V0的51%时,所述拖缆装置处于超速工作状态,当所述拖缆装置的移动速度低于V0的49%时,所述拖缆装置处于欠速工作状态。
在所述拖缆运行阶段,在采煤机下行过程中,拖缆变频器的控制策略优选以转矩控制为主、张力监控为辅,当拖缆装置处的供电电缆的张力检测值低于所述安全运行张力范围的下限,则增大拖缆变频器的输出转矩,当拖缆装置处的供电电缆的张力检测值高于所述安全运行张力范围的上限,则减小拖缆变频器的输出转矩。
在所述拖缆运行阶段,当采煤机机身处的供电电缆的张力检测值和拖缆装置处的供电电缆的张力检测值其中之一高于相应的张力警报阈值时,则控制模块控制警报装置立即发出警报,其中之一高于相应地停机阈值时,则控制模块发送停机指令,针对同一位置处的供电电缆,所述停机阈值高于所述张力警报阈值,对于拖缆装置处的供电电缆,相应的张力警报阈值不低于所述安全运行张力范围的上限。
所述控制模块发送停机指令后,直接进入所述拖缆收尾阶段。
控制所述拖缆装置放松所述供电电缆的方法优选为:按照采煤机牵引方向的前后,采煤机停止牵引时,如果采煤机在前、拖缆装置在后,控制拖缆电机在采煤机停机后延迟一定时间再停机;如果拖缆装置在前、采煤机在后,控制拖缆电机反转。
采煤机机身处的供电电缆的张力检测值可以通过在采煤机机身与供电电缆连接处设置第一张力检测模块直接获取,拖缆装置处的供电电缆的张力检测值可以通过在拖缆电机与拖缆链连接处设置第二张力检测模块间接获取。
本发明的有益效果是:
本发明通过速度控制、转矩控制和张力控制的协调配合,保证拖缆装置自动动态跟随采煤机行进,且行进速度与采煤机牵引速度保持稳定匹配。
本发明通过控制拖缆装置行进前和停止后供电电缆的适时、适度张紧或放松,避免供电电缆发生堆叠或被拉断,由于整个控制过程自动完成,不需要人工监控和调整,极大地降低了人力和物力成本,而且还实现了采煤机工作过程中拖缆的高自动化。
由于张力检测模块对供电电缆的张力的实时检测,以及拖缆过程中不同阶段的涉及供电电缆张力安全范围的多个阈值的设定,对供电电缆各种可能的异常状态都做到可测、可防、可控,实现了采煤机工作过程中拖缆的高可靠性。
附图说明
图1是本发明的采煤机专用拖缆系统控制方法的流程示意图;
图2是本发明的供电电缆和张力检测模块布置示意图;
图3是所述拖缆启动阶段的控制流程图;
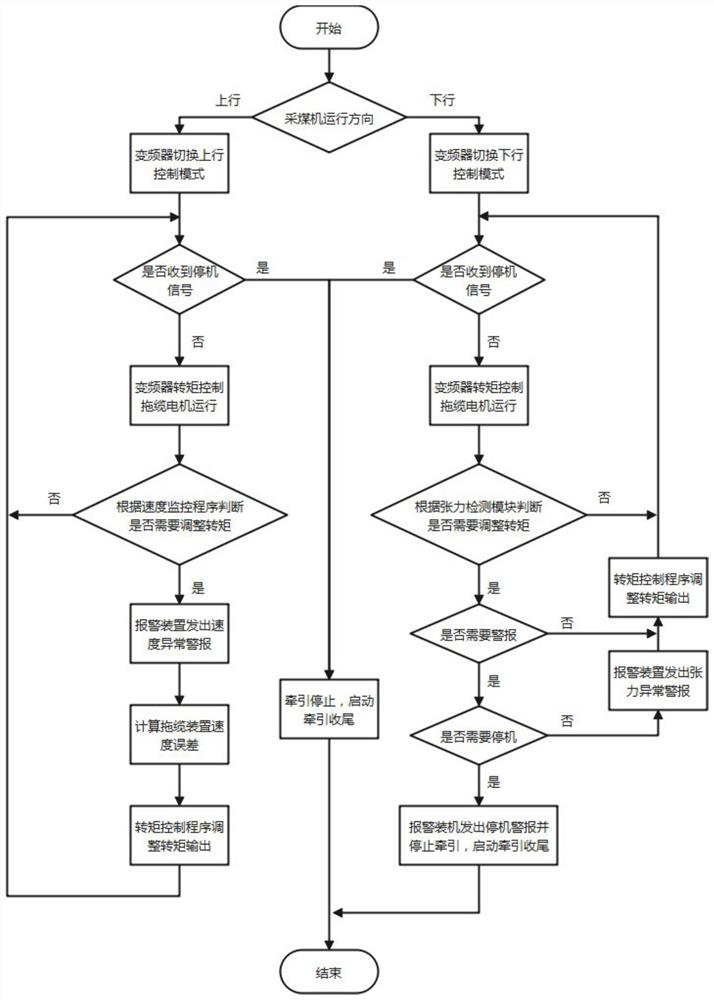
图4是所述拖缆运行阶段的控制流程图;
图5是所述拖缆收尾阶段的控制流程图。
附图标记:
1.采煤机;2.张力检测模块(A1);3.采煤机供电电缆;4.拖缆装置;5.张力检测模块(A2);6.拖缆电机;7.拖缆变频器。
具体实施方式
本发明公开了一种采煤机专用拖缆系统控制方法(可简称为拖缆系统控制方法),如图1-5所示,包括以下几个控制阶段:
S1、拖缆启动阶段:采煤机1牵引启动前,通过拖缆变频器7控制拖缆电机6拖动拖缆装置4,对采煤机供电电缆3进行自动收紧,直至拖缆装置处的供电电缆的张力检测值T2进入预设的安全运行张力范围内;
S2、拖缆运行阶段:采煤机牵引启动,拖缆电机启动,通过控制拖缆电机的转速,控制拖缆装置的移动速度与采煤机牵引速度的比值在设定范围内,同时保持拖缆装置处的供电电缆的张力检测值处于所述安全运行张力范围内,并控制拖缆电机的转向随采煤机牵引方向的改变而改变;
S3、拖缆收尾阶段:采煤机先停止牵引,然后控制所述拖缆装置放松所述供电电缆,直至采煤机机身处的供电电缆的张力检测值进入预设的安全停机张力范围内,说明供电电缆已经被适当放松,以避免采煤机或者拖缆装置发生滑动等情况时将电缆拉断。然后拖缆系统停机,牵引收尾结束。
所述拖缆系统控制方法的实施主体是控制模块,控制针对的对象包括拖缆装置、拖缆电机、拖缆变频器和采煤机牵引系统。
在所述拖缆运行阶段,通常设置靠近刮板输送机机头侧的牵引变频器为主从控制的主机,拖缆变频器和靠近刮板输送机机尾侧的牵引变频器为从机。拖缆变频器和牵引变频器对拖缆速度和牵引速度进行实时控制。根据采煤机上行(由机头向机尾方向牵引)和下行(由机尾向机头方向牵引)时供电电缆和拖缆装置的不同受力特点,拖缆变频器分别采用不同的控制逻辑。
在所述拖缆运行阶段,在采煤机上行过程中,拖缆变频器的控制策略优选以转矩控制为主、速度监控为辅,当所述拖缆装置处于超速工作状态时,减小所述拖缆变频器的输出转矩;当所述拖缆装置处于欠速工作状态时,增大所述拖缆变频器的输出转矩。速度监控通过速度调节程序实现,当拖缆装置处于超速或欠速工作状态时,速度调节程序根据速度偏离正常工作状态的程度给出相应大小的输出反馈信号到转矩控制程序,使变频器输出转矩进行相应的调整,改变输出转矩,进而调控拖缆电机的转速,从而保持所述拖缆装置的移动速度对采煤机牵引速度的稳定跟随,避免拖缆装置的移动速度脱离安全范围。
超速和欠速优选按照如下范围设定:设置采煤机牵引速度为基准速度V0,当所述拖缆装置的移动速度在V0的49%-51%范围内时,视为正常工作状态,当所述拖缆装置的移动速度高于V0的51%时,认为所述拖缆装置处于超速工作状态,当所述拖缆装置的移动速度低于V0的49%时,认为所述拖缆装置处于欠速工作状态。
当拖缆装置处于超速或欠速工作状态时,控制模块可以控制报警装置发出速度异常警报。
在所述拖缆运行阶段,在采煤机下行过程中,拖缆变频器的控制策略优选以转矩控制为主、张力监控为辅,当拖缆装置处的供电电缆的张力检测值T2低于所述安全运行张力范围的下限,则增大拖缆变频器的输出转矩;当拖缆装置处的供电电缆的张力检测值T2高于所述安全运行张力范围的上限,则减小拖缆变频器的输出转矩。以此将供电电缆张力控制在安全范围内,避免电缆堆叠或被拉断等危险情况的发生。
在所述拖缆运行阶段,无论上行还是下行,当采煤机机身处的供电电缆的张力检测值T
当张力检测值高于张力警报阈值时,通常先判断张力检测值是否还高于相应的停机阈值,当张力检测值也高于停机阈值时,控制模块直接发出停机指令,当张力检测值不高于停机阈值时,控制模块控制警报装置发出张力异常警报。
张力警报阈值和停机阈值以及相应的张力检测值超限判断的设置,可避免意外情况导致供电电缆被拉断或供电电缆脱出电缆槽的极端情况的发生,从而保证采煤机和拖缆系统的安全。
需要说明的是,由于采煤机上行和下行时拖缆装置的受力不同,因此上行和下行时即使针对供电电缆在同一位置的张力检测值,所述安全运行张力范围、张力警报阈值和停机阈值也可能各不相同。
所述控制模块发送停机指令后,直接进入所述拖缆收尾阶段,即采煤机先停止牵引,然后拖缆装置放松供电电缆,最后拖缆装置停机。
控制所述拖缆装置放松所述供电电缆的方法为:按照采煤机牵引方向的前后,采煤机停止牵引时,如果采煤机在前、拖缆装置在后,控制拖缆电机在采煤机停机后延迟一定时间再停机;如果拖缆装置在前、采煤机在后,控制拖缆电机反转实现供电电缆的放松。
采煤机机身处的供电电缆的张力检测值可以通过在采煤机机身与供电电缆连接处设置第一张力检测模块(A1)2直接获取。拖缆装置处的供电电缆的张力检测值可以通过在拖缆电机与拖缆链连接处设置第二张力检测模块(A2)5间接获取。由于拖缆过程中,拖缆电机与拖缆链连接处的张力包括了拖缆装置处的供电电缆的张力和拖缆装置本身的摩擦力,其中拖缆装置本身的摩擦力较为稳定,基本不变,因此根据第二张力检测模块的监测数据可以推算出拖缆装置处的供电电缆的张力及其变化情况。
在所述拖缆运行阶段,控制拖缆装置的行进速度与采煤机牵引速度的比值优选为1/2,保证供电电缆适度张紧。
需要说明的是,所述安全运行张力范围、安全停机张力范围、张力警报阈值和停机阈值是根据实际工况,例如电缆型号、电缆长度、电缆单位重量、工作面长度以及采煤机电缆连接处距电缆槽的垂直距离等参数对供电电缆进行受力分析和张力计算的基础上确定的。不同位置处的供电电缆、处于不同的控制阶段时的受力不同(例如采煤机上行和下行时拖缆装置的受力不同),因此相应的上述各张力范围和各阈值通常不相同。
进一步地,在采煤机牵引方向改变前,可再次判断拖缆装置处的供电电缆的张力检测值是否在所述安全运行张力范围内,如果低于所述安全运行张力范围的下限,通过拖缆变频器控制拖缆电机拖动拖缆装置,对供电电缆进行再次收紧,直至拖缆装置处的供电电缆的张力检测值进入针对该处供电电缆预设的安全运行张力范围内。如果拖缆装置处的供电电缆的张力检测值仍在安全运行张力范围内,则不需要进行收紧,采煤机可以直接换向。
- 采煤机专用拖缆系统控制方法
- 电牵引采煤机专用拖缆系统电气控制装置