一种微黏性化工液体全方位混合方法
文献发布时间:2023-06-19 11:09:54
技术领域
本发明涉及预应力钢绞线技术领域,尤其涉及一种微黏性化工液体全方位混合方法。
背景技术
目前,随着科学技术的发展,工业等领域都在快速发展,随之而来的带动化工原料的使用量的剧增,而在化工原料的加工过程中,往往需要对化工原料进行溶解混合处理;但是现有的化工原料溶解混合装置通常是由溶解箱内的搅拌轴和搅拌桨组成,动力装置带动搅拌轴转动,从而带动搅拌桨对物料进行搅拌使其溶解,由于其搅拌范围有限,物料溶解不充分,在容器内还会存在不少搅拌桨作用不到的死角,死角处的液体则难以与容器中心位置的液体实现充分混合,以上的问题最终会导致容器内的各处液体混合搅拌部均匀,搅拌混合效率差。
发明内容
本发明的目的是为了解决现有技术中存在的问题,而提出的一种微黏性化工液体全方位混合方法。
为了实现上述目的,本发明采用了如下技术方案:
一种微黏性化工液体全方位混合方法,基于混合搅拌容器,其侧部设有立式的升降槽;升降槽内具有上下活动的滑座,水平向贯穿滑座设有转轴;转轴朝向混合搅拌容器的端部安装有翻转板,该部分的转轴上还设有第一固定臂和第二固定臂,第一固定臂和第二固定臂均垂直于转轴;转轴背离混合搅拌容器的端部安装有摆动臂,摆动臂末端具有销轴,摆动臂也垂直于转轴,滑座底部设有延长臂,延长臂末端与摆动臂的销轴之间设有弹簧;转轴两侧的滑座上还设有限位销;混合搅拌容器内靠近升降槽的底部设有滑槽,滑槽中具有滑条,滑条中间位置具有立式的三角块,滑条两端固定设有立架,立架下端固定于滑条端部,立架上端设有挡臂,滑座位于两个立架之间升降活动;所述混合方法包括以下步骤:
步骤一:滑条归位,置于滑槽左侧,第一固定臂和第二固定臂也位于转轴(4)的左侧,第一固定臂在上,第二固定臂在下,摆动臂受弹簧的牵引而卡在右侧的限位销上,转轴端部的翻转板呈水平状态,动力设备启动;
步骤二:动力设备驱动滑座下降,翻转板下压整个混合搅拌容器内液体,混合搅拌容器中心位置的液体从翻转板和混合搅拌容器内置之间的缝隙快速上升,滑座下降直至升降槽底部,第二固定臂的末端接触三角块的左侧斜边上部,继续下降后,挤压三角块,第二固定臂相对三角块左侧斜边滑动,使三角块带动滑条向滑槽右侧移动,滑条同时也带动两个立架右移,直至第二固定臂的末端接触三角块的左侧斜边下部;
步骤三:动力设备驱动滑座上升 ,翻转板上提整个混合搅拌容器内液体,混合搅拌容器中心位置的液体从翻转板和混合搅拌容器内置之间的缝隙快速下降,此时滑条保持不动,滑座上升至左侧立架处,处于上部的第一固定臂接触左侧立架的挡臂,滑座继续上升,第一固定臂向上挤压挡臂,则带动转轴逆时针转动,当第一固定臂转动超过1/4圆后,摆动臂随转轴转动正好超过垂直中心线,在弹簧的牵引下,带动摆动臂向左侧活动,直至卡在左侧的限位销上,完成180°的转动,而第一固定臂和第二固定臂也随转轴逆时针完成180°的转动,而转轴端部的翻转板在溶液中也实现180°的翻转,实现大面积的搅动;
步骤四:动力设备驱动滑座再次下降,引起内部液体扰流,下降直至底部,第一固定臂的末端接触三角块的右侧斜边上部,继续下降后,挤压三角块,第一固定臂相对三角块右侧斜边滑动,使三角块带动滑条向滑槽左侧移动,滑条同时也带动两个立架左移,直至第一固定臂的末端接触三角块的右侧斜边下部;
步骤五:动力设备驱动滑座再次上升,第二固定臂向上挤压右侧立架的挡臂,则带动转轴顺时针180°转动,摆动臂向右侧活动,直至卡在右侧的限位销上,翻转板再次翻转,再次实现大面积的搅动;
步骤六:重复操作以上动作,翻转板在混合搅拌容器内的大面积上下升降,作用混合搅拌容器内的几乎全部的液体和空间,配合大范围的翻转动作,实现搅拌混合。
作为更进一步的有优选方案,转轴两侧的限位销处于同一高度,摆动臂在两个限位销之间的活动范围为180度。
作为更进一步的有优选方案,混合搅拌容器为桶状结构,所述翻转板为圆形,翻转板的直径为混合搅拌容器直径的0.7-0.9倍。
作为更进一步的有优选方案,翻转板上分布有若干通孔,通孔的朝向为随机的;翻转板为网状结构。
作为更进一步的有优选方案,滑座完成单次上升或下降的时间为10秒-15秒。
本发明中结构简单,相比较传统搅拌容器而言,其搅拌速度更快,能够作用到容器内各个区域的均匀搅拌,完全无死角,自动化性能高。
附图说明
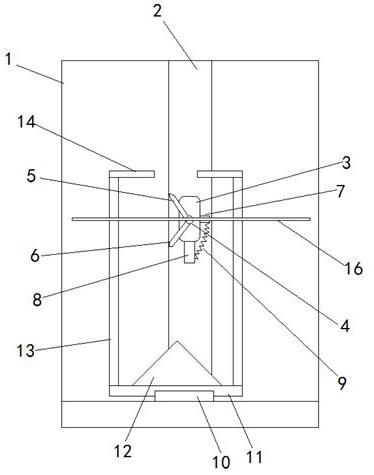
图1为本发明的正视图;
图2为滑座的后视图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
本发明的一种微黏性化工液体全方位混合容器,包括上部开口的混合搅拌容器1,混合搅拌容器1的侧部设有与混合搅拌容器1连通的升降槽2,升降槽2为立式的,混合搅拌容器1一般为桶状或立方体的结构 ;
升降槽2内具有滑座3,滑座3限位于升降槽2,滑座3由动力设备驱动在升降槽2内具有上下活动,水平向贯穿滑座3设有转轴4,转轴4正向朝向混合搅拌容器1;转轴4朝向混合搅拌容器1的端部安装有翻转板16,翻转板16的形状根据混合搅拌容器1的形状而定,混合搅拌容器1为桶状,则翻转板16为圆形,混合搅拌容器1为立方体,则翻转板16为矩形结构;
朝向混合搅拌容器1的转轴4径向上还设有第一固定臂5和第二固定臂6,第一固定臂5和第二固定臂6均垂直于转轴4,两者长度相同,第一固定臂5和第二固定臂之间的夹角为120度;
转轴4背离混合搅拌容器1的端部安装有摆动臂7,摆动臂7末端具有销轴,摆动臂7也垂直于转轴4,滑座3底部设有延长臂8,延长臂8末端与摆动臂7的销轴之间设有弹簧9;所述转轴4两侧的滑座3上还设有用于阻挡摆动臂7向下活动的限位销15;
当转轴4转动,摆动臂7随之转动,经过垂直中心线后,则会受到弹簧9的牵引,快向该侧转动,直至到达该侧的限位销15,而转轴4上的第一固定臂5和第二固定臂6也会相应发生转动。
混合搅拌容器1内靠近升降槽2的底部设有滑槽10,滑槽10垂直于正对升降槽2的混合搅拌容器1的半径,滑槽10垂直于升降槽2,滑槽10中具有滑条11,滑槽10内两端具有避免滑条11滑出的限位块,两限限位块的位置也是滑条11的最大移动路径,滑条11长度大于滑槽10,滑条11中间位置具有立式的三角块12,三角块12的一个角朝上,滑条11两端固定设有立架13,立架13垂直于滑条11,立架13下端固定于滑条11端部,立架13上端朝向另一个立架13的方向设有挡臂14,滑座3位于两个立架13之间升降活动;
挡臂14的高度一般处于混合搅拌容器1的中上部。
注意的是,受到弹簧9的牵引,转轴4转动后,第一固定臂5和第二固定臂6始终位于同一侧,第一固定臂5或第二固定臂6下降会接触挤压三角块12的斜边,带动滑条11移动,第一固定臂5或第二固定臂6上升会接触挡臂14,带动转轴4转动。
本发明的微黏性化工液体全方位混合方法,首先滑条11归位,置于滑槽10左侧(到头),第一固定臂5和第二固定臂6也位于转轴4的左侧(第一固定臂5在上,第二固定臂6在下),摆动臂7受弹簧9的牵引而卡在右侧的限位销15上,转轴4端部的翻转板16呈水平状态,动力设备启动;
然后带动滑座3下降,直至底部,第二固定臂6的末端接触三角块12的左侧斜边上部,继续下降后,挤压三角块12,第二固定臂6相对三角块12左侧斜边滑动,使三角块12带动滑条11向滑槽10右侧移动(到头),滑条11同时也带动两个立架13右移,此时第二固定臂6的末端接触三角块12的左侧斜边下部;
接着带动滑座3上升 ,滑条11保持不动,滑座3上升至左侧立架13处,处于上部的第一固定臂5接触左侧立架13的挡臂14,滑座3继续上升,第一固定臂5向上挤压挡臂14,则带动转轴4逆时针转动,当第一固定臂5转动超过1/4圆后,摆动臂7随转轴4转动正好超过垂直中心线,在弹簧9的牵引下,带动摆动臂7向左侧活动,直至卡在左侧的限位销15上,完成180°的转动,而第一固定臂5或第二固定臂6也随转轴4逆时针完成180°的转动,而转轴4端部的翻转板16在溶液中也实现180°的翻转,实现大面积的搅动;
接着滑座3再次下降,直至底部,第一固定臂5的末端接触三角块12的右侧斜边上部,继续下降后,挤压三角块12,第一固定臂5相对三角块12右侧斜边滑动,使三角块12带动滑条11向滑槽10左侧移动(到头),滑条11同时也带动两个立架13左移,此时第一固定臂5的末端接触三角块12的右侧斜边下部;
最后滑座3上升,第二固定臂6向上挤压右侧立架13的挡臂14,则带动转轴4顺时针转动,翻转板16再次翻转;
以上动作反复运动,可实现翻转板16在混合搅拌容器1内的大面积上下升降,作用混合搅拌容器1内的几乎全部的液体和空间,并且配合大范围的翻转动作,实现搅拌混合。
注意的是,转轴4两侧的限位销15处于同一高度,摆动臂7在两个限位销15之间的活动范围为180度。
摆动臂7与翻转板16平行,翻转板16翻转定位后始终处于水平向,翻转板16与第一固定臂5之间的夹角以及翻转板16与第二固定臂之间的夹角均为60度,且在转轴4的轴向上看,第一固定臂5、第二固定臂6、摆动臂7三者之间的夹角均为120°。
最优的混合搅拌容器1形状为桶状结构,相应的翻转板16为圆形,翻转板16上分布有若干通孔,通孔的朝向为随机的,在翻转板16上升或下降时,液体可经过各个通孔,出孔后可向不同方向运动,实现充分混合,翻转板16的直径为混合搅拌容器1直径的0.7-0.99倍,可最大程度的作用于混合搅拌容器1内的每一块区域,绝对无死角,且各个区域的搅拌机会和混合程度相同。
相对于较为粘稠的液体时,翻转板16可采用网状结构。
动力设备为电机,并纵向贯穿滑座3设有内螺孔,贯穿内螺孔设有与其啮合的螺杆17,电机安装在升降槽2顶部,电机的动力输出端与螺杆17上端固定连接,电机正反转带动螺杆17正反转,使滑座3升降。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种微黏性化工液体全方位混合方法
- 一种微黏性化工液体全方位混合容器