一种基于物联网的外科医疗床及其使用方法
文献发布时间:2023-06-19 11:09:54
技术领域
本发明属于医疗床技术领域,特别是涉及一种基于物联网的外科医疗床及其使用方法。
背景技术
医疗床,是指使用于人体的器具或者其他物品,其用于人体体表的作用不适用药理学、免疫学或者代谢的手段获得,但是可能有这些手段参与并起一定的辅助作用;其使用旨在达到下列预期目的:(一)对疾病的预防、诊断、治疗、监护、缓解;(二)对损伤或者残疾的诊断、治疗、监护、缓解、补偿。
对于双腿残疾使用者,现有医疗床功能太少,无法辅助使用者自己起来拿取餐桌物品进食,将餐桌直接放在床上影响使用者翻身,将餐桌放在床头,使用者被托起后无法拿到,仍然需要其他工作人员辅助,不太适用工薪家庭使用,工薪家庭中大多除残疾病人外,其他家属大多工作来维持家庭开支,这种状况下无力抽出人员长期看护残疾家属。
发明内容
本发明的目的在于提供一种基于物联网的外科医疗床及其使用方法,通过在第一滑道内滑动配合有滑动块,滑动块上端转动配合有第一齿轮,第一滑道一侧阵列有多个轮齿,便于滑动滑动块带动,餐桌沿床体长度方向滑动,餐桌由餐桌长度方向与床体长度方向平行转动至餐桌长度方向与床体长度方向垂直,便于使用者拿取物品,当使用者不使用餐桌时反向滑动滑动块带动,餐桌沿床体长度方向滑动,餐桌由餐桌长度方向与床体长度方向垂直转动至餐桌长度方向与床体长度方向平行,餐桌从位于床体上方转动至床体一侧,便于使用者躺下单手拿取物品,同时不影响使用者翻身,解决了上述现有技术中存在的问题。
为达上述目的,本发明是通过以下技术方案实现的:
一种基于物联网的外科医疗床,包括病人坐立辅助组件,餐桌组件,餐桌移动组件、床体;
餐桌移动组件包括开设有床体一侧的第一滑道,第一滑道内滑动配合有滑动块,滑动块上端转动配合有第一齿轮,第一滑道一侧阵列有多个轮齿,第一齿轮上装设有两支撑杆,支撑杆周侧套设有第一圆环,支撑杆周侧滑动配合有第二圆环,第一圆环、第二圆环周侧分别转动配合有第一支撑杆、第二支撑杆,第一支撑杆、第二支撑杆第一端转动配合,第一支撑杆第一端转动配合有第三支撑杆,两支撑杆上端装设有餐桌,餐桌底端滑动配合有第一电动推杆,且第三支撑杆固定在第一电动推杆输出端;
餐桌组件包括开设于餐桌上端的第一阶梯槽,第一阶梯槽内设有集水盒,集水盒周侧设有电动导轨,餐桌一侧开设有与集水盒连通的垃圾槽,餐桌一侧装设有垃圾斗,且垃圾槽位于垃圾斗内;
病人坐立辅助组件包括多个转动配合的第一板体,位于病人坐立辅助组件第一端相对两侧均装设有第一拉杆,位于病人坐立辅助组件第二端相对两侧均装设有第二拉杆,相邻第一拉杆、第二拉杆之间设有链条,床体相对两侧均转动配合有链条向对应的飞轮。
可选的,第一滑道截面为L形。
可选的,第一圆环周侧开设有第一缺口,第一支撑杆第二端转动配合在第一缺口内,第二支撑杆周侧开设有第二缺口,第二支撑杆第二端转动配合在第二缺口内。
可选的,餐桌底端开设有T字形槽道,T字形槽道内滑动配合有T字形凸块,且第一电动推杆固定在T字形凸块的底端,支撑杆周侧套设有第一弹簧,且第一弹簧两端分别固定在第二圆环、第一齿轮相对两侧。
可选的,床体一端转动配合有倾斜靠背,靠背相对两侧均设有转向杆,床体相对两侧均设有转向块。
可选的,链条与转向杆、转向块外侧贴合。
可选的,集水盒上端滑动配合有过滤板,过滤板底端设有两支撑柱,且过滤板、两支撑柱位于集水盒内。
可选的,滑动块截面为C字形,支撑杆为L型杆体,床体相对两侧均设有连接杆,连接杆一端设有第一电机,且第一电机输出端与飞轮卡接。
可选的,第一滑道一侧开设有第二阶梯槽,第二阶梯槽内转动配合有T字形螺纹杆,滑动块一侧开设有螺纹孔,T字形螺纹杆螺纹配合在螺纹孔内,第一滑道一侧设有第二电机,且第二电机输出端与T字形螺纹杆一端卡接。
一种基于物联网的外科医疗床使用方法,其特征在于,包括;
步骤一,转动倾斜靠背,使倾斜靠背与床体高度相同;
步骤二,开启第一电机带动飞轮转动,飞轮通过链条拉动病人坐立辅助组件滑动至倾斜靠背上;
步骤三,转动倾斜靠背,使病人上半身倾斜坐立;
步骤四,开启第二电机,第二电机带动滑动块、餐桌滑动,第一齿轮、轮齿啮合带动,餐桌由餐桌长度方向与床体长度方向平行转动至餐桌长度方向与床体长度方向垂直;
步骤五,开启电动导轨改变电动导轨上食物位置。
本发明的实施例具有以下有益效果:
本发明的一个实施例通过在第一滑道内滑动配合有滑动块,滑动块上端转动配合有第一齿轮,第一滑道一侧阵列有多个轮齿,便于滑动滑动块带动,餐桌沿床体长度方向滑动,餐桌由餐桌长度方向与床体长度方向平行转动至餐桌长度方向与床体长度方向垂直,便于使用者拿取物品,当使用者不使用餐桌时反向滑动滑动块带动,餐桌沿床体长度方向滑动,餐桌由餐桌长度方向与床体长度方向垂直转动至餐桌长度方向与床体长度方向平行,餐桌从位于床体上方转动至床体一侧,便于使用者躺下单手拿取物品,同时不影响使用者翻身,通过在支撑杆周侧套设有第一圆环,支撑杆周侧滑动配合有第二圆环,第一圆环、第二圆环周侧分别转动配合有第一支撑杆、第二支撑杆,第一支撑杆、第二支撑杆第一端转动配合,第一支撑杆第一端转动配合有第三支撑杆,第三支撑杆固定在第一电动推杆输出端,第一支撑杆、第二支撑杆的设置便于支撑餐桌,提高餐桌的稳定性,便于第一电动推杆拉动第一支撑杆调节第一支撑杆远离床体一端与床体的间距,同时调节第一支撑杆支撑力方向,降低第一支撑杆对使用者的影响,通过在集水盒周侧设有电动导轨,便于开启电动导轨,电动导轨带动电动导轨上食物位移,改变电动导轨上不同食物与使用者的间距变化,便于使用者选取不同食物拿取,通过在第一阶梯槽内设有集水盒,餐桌一侧装设有垃圾斗,且垃圾槽位于垃圾斗内,便于使用者将垃圾和废水倒入垃圾斗内,提高双腿残疾使用者的便捷性。
当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
附图说明
构成本申请的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
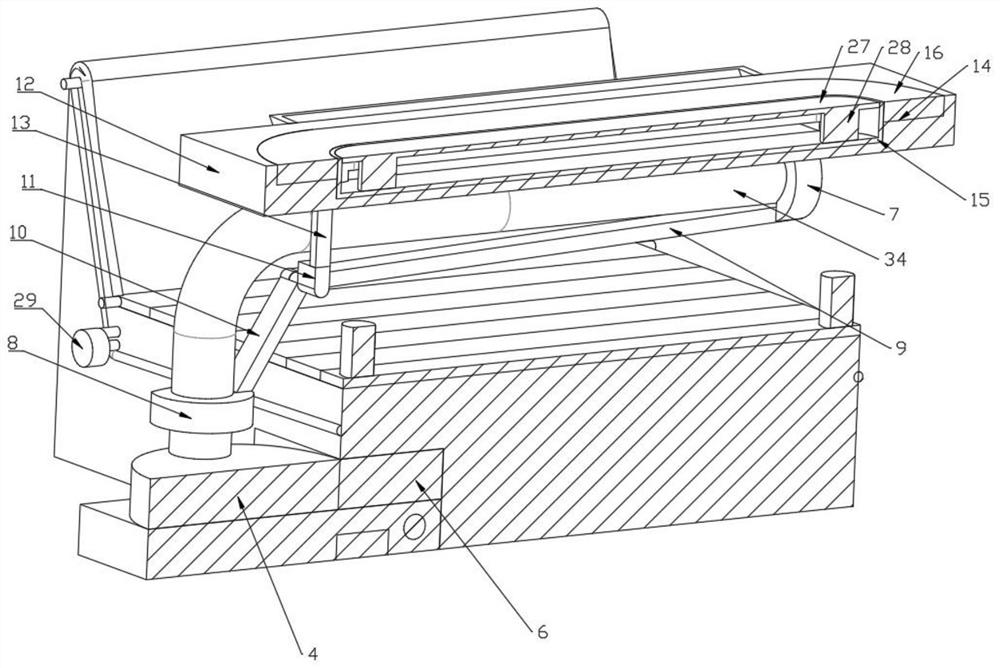
图1为本发明一实施例的立体结构示意图;
图2为本发明一实施例的仰视图;
图3为本发明一实施例的T字形螺纹杆剖视图;
图4为本发明一实施例的剖视图;
图5为本发明一实施例的餐桌剖视图。
其中,上述附图包括以下附图标记:
床体1,第一滑道2,滑动块3,第一齿轮4,抓杆5,轮齿6,第一圆环7,第二圆环8,第一支撑杆9,第二支撑杆10,第三支撑杆11,餐桌12,第一电动推杆13,第一阶梯槽14,集水盒15,电动导轨16,垃圾槽17,垃圾斗18,第一板体19,第一拉杆20,第二拉杆21,链条22,飞轮23,倾斜靠背24,转向杆25,转向块26,过滤板27,支撑柱28,第一电机29,第二阶梯槽30,T字形螺纹杆31,螺纹孔32,第二电机33,支撑杆34。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。
为了保持本发明实施例的以下说明清楚且简明,本发明省略了已知功能和已知部件的详细说明。
请参阅图1-5所示,在本实施例中提供了一种基于物联网的外科医疗床,包括:病人坐立辅助组件,餐桌组件,餐桌移动组件、床体1;
餐桌移动组件包括开设有床体1一侧的第一滑道2,第一滑道2内滑动配合有滑动块3,滑动块3上端转动配合有第一齿轮4,第一滑道2一侧阵列有多个轮齿6,第一齿轮4上装设有两支撑杆34,支撑杆34周侧套设有第一圆环7,支撑杆34周侧滑动配合有第二圆环8,第一圆环7、第二圆环8周侧分别转动配合有第一支撑杆9、第二支撑杆10,第一支撑杆9、第二支撑杆10第一端转动配合,第一支撑杆9第一端转动配合有第三支撑杆11,两支撑杆34上端装设有餐桌12,餐桌12底端滑动配合有第一电动推杆13,且第三支撑杆11固定在第一电动推杆13输出端;
餐桌组件包括开设于餐桌12上端的第一阶梯槽14,第一阶梯槽14内设有集水盒15,集水盒15周侧设有电动导轨16,餐桌12一侧开设有与集水盒15连通的垃圾槽17,餐桌12一侧装设有垃圾斗18,且垃圾槽17位于垃圾斗18内;
病人坐立辅助组件包括多个转动配合的第一板体19,位于病人坐立辅助组件第一端相对两侧均装设有第一拉杆20,位于病人坐立辅助组件第二端相对两侧均装设有第二拉杆21,相邻第一拉杆20、第二拉杆21之间设有链条22,床体1相对两侧均转动配合有链条22向对应的飞轮23。
本实施例一个方面的应用为:先转动倾斜靠背24,使倾斜靠背24与床体1高度相同,转动飞轮23通过链条22拉动病人坐立辅助组件在床体1上滑动,病人坐立辅助组件一端滑动到倾斜靠背24上,然后转动倾斜靠背24,使病人上半身倾斜坐立;
滑动滑动块3,带动支撑杆34、餐桌12沿床体1长度方向滑动,带动多个轮齿6与第一齿轮4啮合,带动餐桌12由餐桌12长度方向与床体1长度方向平行转动至餐桌12长度方向与床体1长度方向垂直,便于使用者拿取物品;
开启电动导轨16,电动导轨16带动电动导轨16上食物位移,改变电动导轨16上不同食物与使用者的间距变化,便于使用者选取不同食物拿取;
开启第一电动推杆13,第一电动推杆13拉动第一支撑杆9转动,第一支撑杆9转动带动第一电动推杆13滑动,第二支撑杆10转动,第二圆环8滑动。
通过在第一滑道2内滑动配合有滑动块3,滑动块3上端转动配合有第一齿轮4,第一滑道2一侧阵列有多个轮齿6,便于滑动滑动块3带动,餐桌12沿床体1长度方向滑动,餐桌12由餐桌12长度方向与床体1长度方向平行转动至餐桌12长度方向与床体1长度方向垂直,便于使用者拿取物品,当使用者不使用餐桌12时反向滑动滑动块3带动,餐桌12沿床体1长度方向滑动,餐桌12由餐桌12长度方向与床体1长度方向垂直转动至餐桌12长度方向与床体1长度方向平行,餐桌12从位于床体1上方转动至床体1一侧,便于使用者躺下单手拿取物品,同时不影响使用者翻身,通过在支撑杆34周侧套设有第一圆环7,支撑杆34周侧滑动配合有第二圆环8,第一圆环7、第二圆环8周侧分别转动配合有第一支撑杆9、第二支撑杆10,第一支撑杆9、第二支撑杆10第一端转动配合,第一支撑杆9第一端转动配合有第三支撑杆11,第三支撑杆11固定在第一电动推杆13输出端,第一支撑杆9、第二支撑杆10的设置便于支撑餐桌12,提高餐桌12的稳定性,便于第一电动推杆13拉动第一支撑杆9调节第一支撑杆9远离床体1一端与床体1的间距,同时调节第一支撑杆9支撑力方向,降低第一支撑杆9对使用者的影响,通过在集水盒15周侧设有电动导轨16,便于开启电动导轨16,电动导轨16带动电动导轨16上食物位移,改变电动导轨16上不同食物与使用者的间距变化,便于使用者选取不同食物拿取,通过在第一阶梯槽14内设有集水盒15,餐桌12一侧装设有垃圾斗18,且垃圾槽17位于垃圾斗18内,便于使用者将垃圾和废水倒入垃圾斗18内,提高双腿残疾使用者的便捷性。
本实施例的第一滑道2截面为L形。
本实施例的第一圆环7周侧开设有第一缺口,第一支撑杆9第二端转动配合在第一缺口内,第二支撑杆10周侧开设有第二缺口,第二支撑杆10第二端转动配合在第二缺口内。
本实施例的餐桌12底端开设有T字形槽道,T字形槽道内滑动配合有T字形凸块,且第一电动推杆13固定在T字形凸块的底端,支撑杆34周侧套设有第一弹簧,且第一弹簧两端分别固定在第二圆环8、第一齿轮4相对两侧,便于第一电动推杆13滑动,第一弹簧的设置便于通过第二圆环8、第二支撑杆10为第一支撑杆9提供支撑力。
本实施例的床体1一端转动配合有倾斜靠背24,靠背24相对两侧均设有转向杆25,床体1相对两侧均设有转向块26。
本实施例的链条22与转向杆25、转向块26外侧贴合。
本实施例的集水盒15上端滑动配合有过滤板27,过滤板27底端设有两支撑柱28,且过滤板27、两支撑柱28位于集水盒15内,便于在过滤板27上食用食物,在食物和饮品洒落时,穿过过滤板27进入集水盒15内,降低食物和饮品洒落流到床上的几率。
本实施例的滑动块3截面为C字形,支撑杆34为L型杆体,床体1相对两侧均设有连接杆,连接杆一端设有第一电机29,且第一电机29输出端与飞轮23卡接,便于第一电机29带动飞轮23转动。
本实施例的第一滑道2一侧开设有第二阶梯槽30,第二阶梯槽30内转动配合有T字形螺纹杆31,滑动块3一侧开设有螺纹孔32,T字形螺纹杆31螺纹配合在螺纹孔32内,第一滑道2一侧设有第二电机33,且第二电机33输出端与T字形螺纹杆31一端卡接,便于第二电机33带动T字形螺纹杆31转动带动滑动块3在第一滑道2内滑动。
一种基于物联网的外科医疗床使用方法,其特征在于,包括;
步骤一,转动倾斜靠背24,使倾斜靠背24与床体1高度相同;
步骤二,开启第一电机29带动飞轮23转动,飞轮23通过链条22拉动病人坐立辅助组件滑动至倾斜靠背24上;
步骤三,转动倾斜靠背24,使病人上半身倾斜坐立;
步骤四,开启第二电机33,第二电机33带动滑动块3、餐桌12滑动,第一齿轮4、轮齿6啮合带动,餐桌12由餐桌12长度方向与床体1长度方向平行转动至餐桌12长度方向与床体1长度方向垂直;
步骤五,开启电动导轨16改变电动导轨16上食物位置。
其中,病人坐立辅助组件周侧设有多个夹子,一第一板体19上端设有两抓杆5,餐桌12设有开关柜,开关柜内设有智能语音音响,开关柜与设备内所有电器连接。
将病人身下被子通过多个夹子与病人坐立辅助组件定位在一起,降低病人倾斜时被子滑动带动病人滑动的几率,抓杆5的设置便于设备带动病人上半身倾斜时,病人双手抓住两抓杆5,进一步降低病人倾斜时被子滑动带动病人滑动的几率;
通过设置开关柜内设有智能语音音响,开关柜与设备内所有电器连接,便于通过智能语音音响声控设备内电器工作,自己控制设备,通过声控控制电器开关为现有物联网技术。
上述实施例可以相互结合。
需要说明的是,本申请的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本申请的实施方式能够以除了在这里图示或描述的那些以外的顺序实施。
在本发明的描述中,需要理解的是,方位词如“前、后、上、下、左、右”、“横向、竖向、垂直、水平”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制;方位词“内、外”是指相对于各部件本身的轮廓的内外。
- 一种基于物联网的外科医疗床及其使用方法
- 一种基于物联网的智能医疗床