一种基于生成对抗神经网络的微电网分层控制策略
文献发布时间:2023-06-19 11:14:36
技术领域
本发明涉及智能电网控制领域,尤其是一种基于生成对抗神经网络的微电 网分层控制策略。
背景技术
随着社会经济的快速发展和生活质量的不断提高,人们对电力能源的需求 和要求也逐渐增加。光伏、风力发电等分布式发电单元由于其具有的清洁性、 高效性已经被广泛应用于电网领域,为了解决分布式电源和传统电网间的矛盾, 提高电力系统的经济性、可靠性,微电网的概念被众多学者提出。目前微电网 普遍采用下垂控制实现系统的即插即用,但由于下垂控制为有静差控制,稳态 时系统电压与频率会与参考值存在偏差,因此需要添加二次控制或改进下垂进 行电压与频率的补偿。传统的二次控制中微电网电压控制采用集中式控制方式, 但该控制方式需要所有发电单元的信息,对于通信网络有着较强的依赖性以及 较高的要求,并且控制过程中需要大量计算,因此集中控制不可靠且不经济;分布式控制利用相邻单元的信息进行信息互换,实现全局控制,大大减少了通 信的依赖性以及计算量,相比于集中控制而言更加稳定可靠,因此分布式控制 被越来越多的应用到微电网控制中。虽然分布式发电降低了通信的依赖程度, 但通信的融入不可避免的会产生时变时延,邻居智能体存在的时变时延仅对系 统的收敛时间产生影响,而本地智能体存在的时变时延会对系统的稳定性和安 全性产生极大影响。因此,如何设计一种通信时变时延下的控制策略,解决本 地智能体的通信时变时延所导致的系统电能质量不稳定问题,保证系统良好的 动态性能,是目前智能电网一个重要研究方向。
发明内容
本发明需要解决的技术问题是提供一种基于生成对抗神经网络的微电网分 层控制策略,基于分布式控制策略对信息传输时的通信时变时延进行考虑,设 计了一种可行、灵活、可靠的电压、频率分层控制策略,进而保证在时变时延 的通信下,能够通过该方法解决智能体的通信时变时延对微电网所造成的系统 电压、频率不稳定问题。
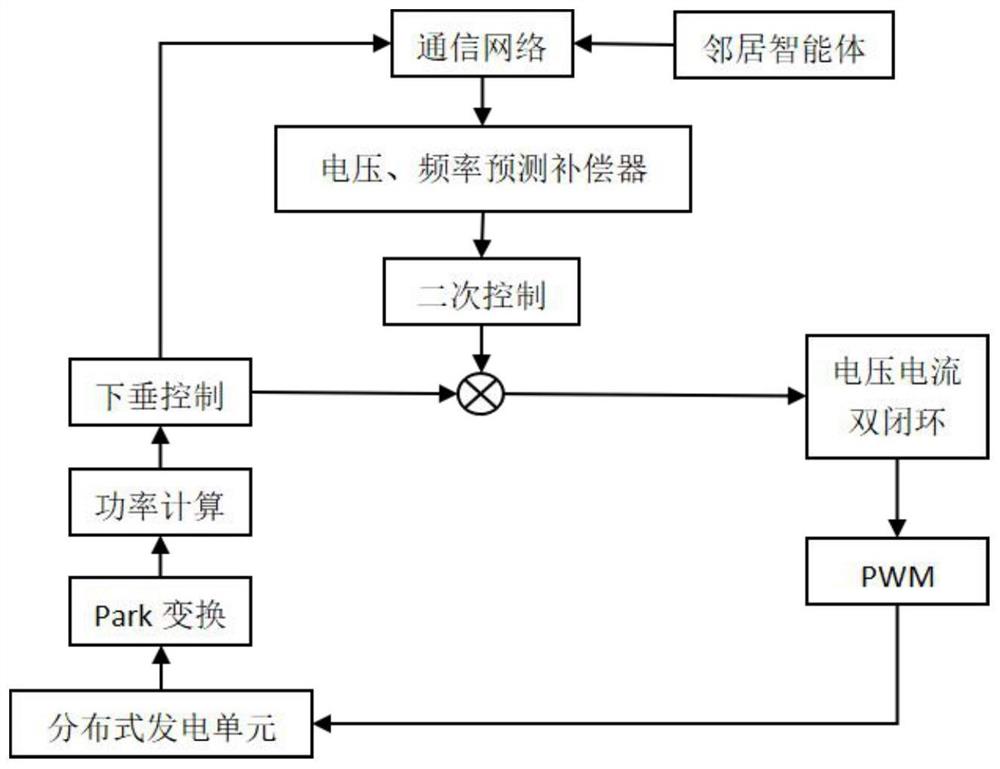
为解决上述技术问题,本发明所采用的技术方案是:一种基于生成对抗神 经网络的微电网分层控制策略,包括物理层和信息层,物理层包括功率计算、 下垂控制、二次控制、电压电流双闭环以及PWM信号产生器;信息层包括考虑 通信时变时延的电压预测补偿器、频率预测补偿器以及通信网络;微电网的分 层控制流程具体如下:
S1、将分布式发电单元输出的电压与电流经过Park变换后输入至功率计算 进行计算得到有功功率P
S2、将功率计算环节输出的有功功率P
S3、将下垂控制生成的频率ω
S4、通过通信网络的数据进入考虑通信时变时延的电压预测补偿器、频率 预测补偿器,对微电网的电压和频率进行预测补偿;
S5、利用电压预测补偿器和频率预测补偿器的输出,使用PI控制器完成系 统的二次控制环节;
S6、二次控制经过电压合成得到合成电压U
θ
S7、电压电流双闭环将输出的控制信号通过PWM信号生成器输出至分布式 发电单元。
本发明技术方案的进一步改进在于:所述步骤S4中电压预测补偿器、频率 预测补偿器包括上层控制架构、中层控制架构和下层控制架构,所述上层控制 架构包括LSTM通信时延神经网络和考虑通信时延的事件触发机制,所述中层控 制架构包括改进的GAN时延生成器,所述下层控制架构包括电压、频率预测BP 神经网络和两模态下的电压虚拟领导者一致性控制器、频率虚拟领导者一致性 控制器,所述LSTM通信时延神经网络将历史实际通信时延进行数据预处理后, 送至LSTM通信时延神经网络不断训练,输出时延预测序列;求出t时刻系统临 界稳定时所允许的最大通信时延,判断预测的时延值与允许的最大通信时延的 大小,当预测的时延值小于最大允许通信时延时为稳定时延,此时将智能体i 输出的电压和频率分别直接输入至两模态下的电压虚拟领导者一致性控制器、 频率虚拟领导者一致性控制器;当预测的时延值大于等于允许的最大通信时延 时为不稳定时延,此时考虑通信时延的事件触发机制被触发,包含不稳定时延 的时延预测序列被输送至改进的GAN时延生成器,所述改进的GAN时延生成器 将上层控制架构输出的包含不稳定时延的时延预测序列和历史实际稳定时延序 列进行博弈,学习历史实际稳定时延的分布,最终将上层控制构架输出的包含 不稳定时延的时延预测序列生成为符合历史分布的稳定时延序列;改进的GAN 时延生成器生成的稳定时延序列和采集的智能体i的电压、频率序列分别传送 至电压预测BP神经网络、频率预测BP神经网络进行二维数据预测,输出稳定 时延输送下的智能体i的电压预测值与频率预测值,将电压预测值与频率预测 值输入至两模态下的电压虚拟领导者一致性控制器、频率虚拟领导者一致性控 制器,实现通信时延下微电网的电压、频率的预测补偿控制。
本发明技术方案的进一步改进在于:求t时刻系统临界稳定时所允许的最 大通信时延具体如下:
当智能体i与邻居智能体j均存在时变时延时,令智能体i和邻居智能体j 的通信时延相同,且t时刻下通信时延为τ(t),x
在t时刻,各智能体通信时延为固定值τ,上式可变为式(12)所示:
式(11)和式(12)中n为智能体数量,k
将系统的稳定性问题转化到频域进行分析,使式(12)能够全局收敛实现 稳定性,如式(13)所示:
[SI+(k
其中,式(13)中L为微电网多智能体网络通信连接的拉普拉斯矩阵,其 中元素可表示为
令G(S)=[SI+(k
s+λ
令s=jω带入式(14)后得到式(15)至(18):
(ω-λ
式(18)中λ
本发明技术方案的进一步改进在于:所述改进的GAN时延生成器包括生成 器G和判别器D,所述生成器G采用参数为θ
原有生成器G的损失函数如式(19)所示:
改进的生成器G的目标函数如式(20)所示:
其中
式(21)为Huber损失函数,其中的δ为设定的真实时延与生成时延间的误 差阈值,式(20)中的
判别器G的目标函数如式(23)所示:
式(23)中,E
根据式(20)和式(23),利用随机梯度下降法对生成器G和判别器D进行 训练,首先,依照式(24)计算判别器梯度,并利用Adam算法计算判别器参数 更新值,通过式(25)更新判别器网络参数:
θ
式(25)中Δθ
其次,当判别器G循环训练k次后,固定训练后的判别器G网络参数不变, 单独对生成器D进行一次训练,依照式(26)计算生成器梯度,并利用Adam算 法计算生成器参数更新值,通过式(27)更新生成器网络参数:
θ
式(27)中Δθ
经过训练后的生成对抗神经网络能够生成虚假稳定时延序列τ
本发明技术方案的进一步改进在于:所述步骤S5中,电压、频率二次 控制环节均采用PI控制器分别实现电压补偿以及频率补偿,电压的反馈量 以及频率反馈量分别如式(43)、式(44)所示:
δU
δω
式(43)中,k
e
e
根据式(3)与式(43)、式(44),得到经过二次控制后,智能体i所 输出的电压和频率为:
将经过二次控制后输出的电压和频率输入至电压合成环节。
由于采用了上述技术方案,本发明取得的技术进步是:本发明针对通信时 变时延下的电压、频率控制,设计了一种基于生成对抗神经网络的微电网分层 控制策略,其中,信息层中提出的考虑通信时变时延的电压预测补偿器、频率 预测补偿器,基于数据驱动的思想首先设计了获取通信时延的LSTM通信时延神 经网络,能够有效准确的对系统未来的通信时延进行预测,解决了测量通信时 延的繁琐性;给出系统临界稳定时所允许的最大通信时延,当预测的时延值大 于等于允许的最大通信时延时,将其定义为不稳定时延,针对不稳定时延提出 并设计了一种基于改进GAN的时延生成器,能够快速有效的将包含不稳定时延 的时延预测序列生成与历史实际稳定时延序列样本相似的时延序列;其次分别 设计了电压预测BP神经网络和频率预测BP神经网络,通过输入稳定时延与采 集的电压和频率,能够对经过稳定时延传输后的电压与频率进行准确预测;最 后根据通信时延大小,分别设计了两模态切换下电压虚拟领导者一致性控制器 与频率虚拟领导者一致性控制器,物理层中利用PI控制器弥补传统下垂造成的 电压偏差与频率偏差,由此完成二次控制环节,实现了不同通信时延条件下的 电压与频率控制,保证了微电网系统在通信时延下的稳定性,为通信时延下的 微电网系统的电压、频率控制提供了一种新的方法。
附图说明
图1是本发明通信时延下分层控制架构图;
图2是本发明电压、频率预测补偿器结构图;
图3是本发明LSTM通信时延神经网络;
图4是本发明时延生成器结构图;
图5是本发明电压预测BP神经网络结构图;
图6是本发明频率预测BP神经网络结构图;
图7是本发明电压、频率二次控制结构图。
具体实施方式
下面结合实施例对本发明做进一步详细说明:
如图1所示,一种基于生成对抗神经网络的微电网分层控制策略,包括物 理层和信息层,物理层包括功率计算、下垂控制、二次控制、电压电流双闭环 以及PWM信号产生器;信息层包括考虑通信时变时延的电压预测补偿器、频率 预测补偿器以及通信网络;微电网的分层控制流程具体如下:
S1、将分布式发电单元输出的电压与电流经过Park变换后输入至功率计算 进行计算得到有功功率P
式(2)中,U
S2、将功率计算环节输出的有功功率P
式(3)中,ω
S3、将下垂控制生成的频率ω
S4、通过通信网络的数据进入考虑通信时变时延的电压预测补偿器、频率 预测补偿器,对微电网的电压和频率进行预测补偿;
对微电网的电压和频率进行预测补偿的方法如图2所示:电压预测补偿器、 频率预测补偿器包括上层控制架构、中层控制架构和下层控制架构,所述上层 控制架构包括LSTM通信时延神经网络和考虑通信时延的事件触发机制,所述中 层控制架构包括改进的GAN时延生成器,所述下层控制架构包括电压、频率预 测BP神经网络和两模态下的电压虚拟领导者一致性控制器、频率虚拟领导者一 致性控制器,所述LSTM通信时延神经网络将历史实际通信时延进行数据预处理 后,送至LSTM通信时延神经网络不断训练,输出时延预测序列;求出t时刻系 统临界稳定时所允许的最大通信时延具体如下:
当智能体i与邻居智能体j均存在时变时延时,令智能体i和邻居智能体j 的通信时延相同,且t时刻下通信时延为τ(t),x
在t时刻,各智能体通信时延为固定值τ,上式可变为式(12)所示:
式(11)和式(12)中n为智能体数量,k
将系统的稳定性问题转化到频域进行分析,使式(12)能够全局收敛实现 稳定性,如式(13)所示:
[SI+(k
其中,式(13)中L为微电网多智能体网络通信连接的拉普拉斯矩阵,其 中元素可表示为
令G(S)=[SI+(k
s+λ
令s=jω带入式(14)后得到式(15)至(18):
(ω-λ
式(18)中λ
判断预测的时延值与允许的最大通信时延的大小,当预测的时延值小于最 大允许通信时延时为稳定时延,此时将智能体i输出的电压和频率分别直接输 入至两模态下的电压虚拟领导者一致性控制器、频率虚拟领导者一致性控制器; 当预测的时延值大于等于允许的最大通信时延时为不稳定时延,此时考虑通信 时延的事件触发机制被触发,包含不稳定时延的时延预测序列被输送至改进的 GAN时延生成器,所述改进的GAN时延生成器将上层控制架构输出的包含不稳定 时延的时延预测序列和历史实际稳定时延序列进行博弈,学习历史实际稳定时 延的分布,最终将上层控制构架输出的包含不稳定时延的时延预测序列生成为 符合历史分布的稳定时延序列;改进的GAN时延生成器生成的稳定时延序列和 采集的智能体i的电压、频率序列分别传送至电压预测BP神经网络、频率预测 BP神经网络进行二维数据预测,输出稳定时延输送下的智能体i的电压预测值 与频率预测值,将电压预测值与频率预测值输入至两模态下的电压虚拟领导者 一致性控制器、频率虚拟领导者一致性控制器,实现通信时延下微电网的电压、 频率的预测补偿控制。
如图3所示:所述LSTM通信时延神经网络包括若干个细胞状态,每个细胞 状态由三个门构成,分别为输入门、遗忘门和输出门,输入数据为历史实际通 信时延序列,输出数据为时延预测序列,LSTM通信时延神经网络输出时延预测 具体步骤如下:
步骤一:对采集到的历史实际通信时延进行数据预处理,所述预处理方式 可根据式(4)进行:
式(4)中,τ'为归一化后的通信时延,τ
步骤二:将归一化预处理后的通信时延分别输入遗忘门、输入门和输出门 进行时延预测;
遗忘门对输入的归一化通信时延序列中无用的状态信息进行丢弃,将t-1 时刻隐藏层细胞输出的时延状态h
f
式(5)中的σ为Sigmoid激活函数,w
输入门起控制信息输入的作用,将t-1时刻隐藏层细胞输出的时延状态h
i
式(6)中的σ为Sigmoid激活函数,w
对细胞状态进行更新,可由式(7)得出t时刻输出的细胞状态:
c
式(7)中的σ为激活函数,f
输出门决定了要输出的通信时延,将t-1时刻隐藏层细胞输出的时延状态 h
o
式(8)中的σ为激活函数,w
t时刻隐藏层细胞的输出状态,如式(9):
h
式(9)中:tanh(c
步骤三:通过多次迭代对预测模型进行训练,对步骤二中得到的各权值和 阈值进行更新,选用均方根误差作为损失函数,当损失函数满足式(10)所示 条件时,停止通信时延预测模型中各权值和阈值的更新,并输出未来一段时间 的预测时延序列:
式(10)中,
如图4所示:所述改进的GAN时延生成器包括生成器G和判别器D,所述生 成器G采用参数为θ
本发明所提的改进GAN中,为了获得生成效果较好的时延序列,首先需要 生成器和判别器进行训练。生成器的目的是生成一部分符合历史稳定时延分布 的稳定时延序列,一定程度上也可视为类回归问题,为了保证生成序列的多样 性和准确性,在原有生成器的损失函数上添加了Huber损失函数并进行改进,
原有生成器G的损失函数如式(19)所示:
改进的生成器G的目标函数如式(20)所示:
其中
式(21)为Huber损失函数表达式,其中的δ为设定的真实时延与生成时延 间的误差阈值,式(20)中的
判别器G的目标函数如式(23)所示:
式(23)中,E
根据式(20)和式(23),利用随机梯度下降法对生成器G和判别器D进行 训练,首先,依照式(24)计算判别器梯度,并利用Adam算法计算判别器参数 更新值,通过式(25)更新判别器网络参数:
θ
式(25)中Δθ
其次,当判别器G循环训练k次后,固定训练后的判别器G网络参数不变, 单独对生成器D进行一次训练,依照式(26)计算生成器梯度,并利用Adam算 法计算生成器参数更新值,通过式(27)更新生成器网络参数:
θ
式(27)中Δθ
经过训练后的生成对抗神经网络能够生成虚假稳定时延序列τ
所述的两模态下的电压虚拟领导者一致性控制器如式(28)所示,
式(28)中,k
所述的两模态下的频率虚拟领导者一致性控制器如式(31)所示,
式(31)中,k
如图5所示:所述电压预测BP神经网络包括输入层、隐藏层和输出层,所 述电压预测BP神经网络输入层的输入数据为包括稳定时延序列和系统电压的二 维数据,输出层的输出数据为经过稳定时延传输后的电压预测值,经过稳定时 延传输后的电压预测值具体获取步骤如下:
步骤一:将稳定时延序列以及电压进行归一化预处理,预处理方式按照式 (33)、(34)所示:
式(33)中τ
步骤二:在稳定时延序列以及电压进行预处理后,将稳定时延序列以及电 压作为电压预测BP神经网络的输入,输入至初始化的BP神经网络中进行训练, 并依据式(35)对参数进行更新:
式(35)中,α
式(36)中
步骤三:当式(36)计算所得的预测误差值满足式(37)所示的条件时, 停止对权值w
e
式(37)中,ξ
如图6所示:所述频率预测BP神经网络包括输入层、隐藏层和输出层,所 述频率预测BP神经网络输入层的输入数据为包括稳定时延序列和系统频率的二 维数据,输出层的输出为经过稳定时延传输后的频率预测值,经过稳定时延传 输后的频率预测值具体获取步骤如下:
步骤一:将稳定时延序列以及频率进行归一化预处理,预处理方式按照式 (38)、(39)所示:
式(38)中τ
步骤二:稳定时延序列以及频率进行预处理后,将稳定时延以及频率作为 频率预测BP神经网络的输入,输入至初始化的BP神经网络中进行训练,并依 据式(40)对参数进行更新:
式(40)中,α
式(41)中
步骤三:当式(41)计算所得的预测误差值满足式(42)所示的条件时, 停止对权值w
e
式(42)中,ξ
S5、利用电压预测补偿器和频率预测补偿器的输出,使用PI控制器完成系 统的二次控制环节;
对微电网的电压、频率二次控制的方法如图7所示:所述步骤S5中, 电压、频率二次控制环节均采用PI控制器分别实现电压补偿以及频率补偿, 电压的反馈量以及频率反馈量分别如式(43)、式(44)所示:
δU
δω
式(43)中,k
e
e
根据式(3)与式(43)、式(44),得到经过二次控制后,智能体i所 输出的电压和频率为:
S6、二次控制经过电压合成得到合成电压U
θ
S7、电压电流双闭环将输出的控制信号通过PWM信号生成器输出至分布式 发电单元。
本发明实现了不同通信时延条件下的电压与频率控制,保证了微电网系统 在通信时延下的稳定性,为通信时延下的微电网系统的电压、频率控制提供了 一种新的方法。
- 一种基于生成对抗神经网络的微电网分层控制策略
- 一种基于分层控制策略的孤岛微电网分布式协调控制方法