一种车道线提取与生成方法
文献发布时间:2023-06-19 11:14:36
技术领域
本发明属于辅助驾驶技术领域,更具体地说,是涉及一种车道线提取与生成方法。
背景技术
智能驾驶和智能交通的发展依赖高精度、高可用、高安全的导航定位辅助。高精度地图作为实现自动驾驶的必要条件,对于提高城市道路复杂环境下的定位精度有着十分重要的作用。高精度地图需要格式化存储交通场景中的各种交通要素,包括传统地图的道路网数据、车道网络数据、车道线以及交通标志等要素。为了提取高精度地图的主体车道信息,众多学者展开了一系列的探索:早在1998年Bertozzi和Broggi就提出了利用逆透视变换的方式提取车道线;2002年Lee提出了通过建立线性模型提取边缘得到车道线;2013年Shang等人提出利用消失点提取车道线;之后车道线的提取逐渐形成了对图像预处理,通过选定拟合的模型,借助sobel、canny等边缘提取算子的提取模式。随着计算机性能的提升和深度学习的不断发展,2017年Lee提出了VGPNet提取车道线,卷积神经网络提取车道线的方法也越来越多。虽然车道线的提取方式多种多样,但仍然制约于路面状况、光线条件、车辆遮挡等情况。
发明内容
本发明的目的在于提供一种车道线提取与生成方法,旨在解决由于路面状况、光线条件、车辆遮挡等情况下不能有效提取出道路中的车道线信息的问题。
为实现上述目的,本发明采用的技术方案是:提供一种车道线提取与生成方法,包括以下步骤:
步骤1:获取目的图像;
步骤2:目的图像预处理;将所述目的图像进行畸变矫正,得到所述图像内车道线的正射影像,
所述正射影像模型为:
以所述目的图像建立坐标系,
(x
步骤3:阈值分割;利用颜色和梯度阈值结合的方式对分割所述正射影响内的所述车道线;
步骤4:滑动窗口提取车道线;将所述车道线离散化为多个窗口,最底部的所述窗口开始通过对二值化图像的直方图统计获得车道线的起始点,所述二值化图像从底部由下往上进行滑动扫描,将扫描结果进行图示;
步骤5:跟踪车道线;通过单个所述窗口滤波和拟合参数滤波,得到更加平滑稳健的所述车道线,实现跟踪效果,
所述跟踪车道线的速度模型为:
q
z
ε为常数,z
经过计算后得到每个所述窗口中心的位置
步骤6:车道生成;将所述扫描结果进行单应性变换与地面线上的所述车道线进行比对。
优选地,所述阈值分割包优选地,括:
步骤3.1:在明亮情况下采用LAB,HSL,HSV三种模型;
步骤3.2:在较暗或者道线被污渍覆盖,设置梯度阈值提取出车道线的边缘,结合颜色阈值和梯度阈值的提取结果我们得到了所述车道线的所述二值化影像。
优选地,所述滑动窗口提取车道线包括:
步骤4.1,通过所述二值化影像获取高斯分布曲线,每一个所述高斯分布曲线的顶点作为起始窗口的中心位置;
步骤4.2,通过所述起始窗口为中心重新确定新的窗口,并以颜色区分新旧所述窗口,最终得到一连串的所述窗口。
优选地,所述直线模型为:
a,b为常数,经过计算后得到每个所述窗口中心的位置为
优选地,所述二次曲线模型为:
c为常数。
优选地,由于前后窗口车道线相似,模型参数变化较小,使用随机游走模型估计系数部分,常量参数使用白噪声进行估计,状态方程为:
a
优选地,车道生成模型为:
其中(x
优选地,像素坐标直接通过所述车道线提取获得,地面点坐标通过双目相机匹配同名点前方交会得到,公式为:
(u,v)是像主点坐标,f是相机参数,b是双目基线,du是左右影像同名点u的差值,z为观测值。
本发明提供的一种车道线提取与生成方法的有益效果在于:与现有技术相比,本发明一种车道线提取与生成方法图像预处理时得到图像的正射影像,得到正射影响后面对颜色阈值理想情况的路面采用LAB模型对黄色的车道线的良好区分度,HSL,HSV模型分别车道线的亮度,明度的良好区分度,从而对车道线进行提取合成,面对颜色阈值不理想的情况下,结合了梯度阈值进行辅助分割置,梯度阈值可以在光照条件不好的情况下提取出车道线的边缘,结合颜色阈值和梯度阈值的提取结果得到车道线的二值化影像。将所述车道线离散化为多个窗口,最底部的所述窗口开始通过对二值化图像的直方图统计获得车道线的起始点,所述二值化图像从底部由下往上进行滑动扫描,将扫描结果进行图示,再根据得到的扫描结果建立速度模型,根据速度模型与车道线进行拟合,以得到更加平滑稳健的车道线,经过斑马线或车道线部分缺失的情况下可以实现良好的跟踪效果,通过单个所述窗口滤波和拟合参数滤波,得到更加平滑稳健的所述车道线,再由得到的车道线构建数学模型,与地面车道线对应改善了在城市复杂的多变的环境下实时更新和维护车道线是非常耗时且昂贵的问题,提高了经济效应。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
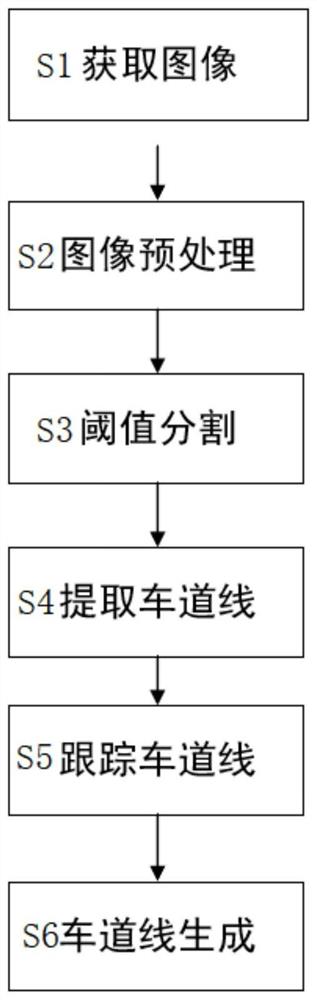
图1为本发明实施例提供的一种车道线提取与生成方法的结构示意图;
图2为本发明实施例提供的一种车道线提取与生成方法的颜色阈值分割示意图;
图3为本发明实施例提供的一种车道线提取与生成方法的滑动窗口提取车道线示意图;
图4为本发明实施例提供的一种车道线提取与生成方法的梯度阈值分割示意图;
图5为本发明实施例提供的一种车道线提取与生成方法的跟踪车道线示意图;
图6为本发明实施例提供的一种车道线提取与生成方法的车道生成示意图。
具体实施方式
为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
请一并参阅图1及图6,现对本发明提供的一种车道线提取与生成方法进行说明。一种车道线提取与生成方法,包括以下步骤:
S1:获取目的图像;
步骤S1的实现方式为:通过车载摄像头获得目的图像。
S2:目的图像预处理;将目的图像进行畸变矫正,得到图像内车道线的正射影像,
步骤S2的实现方式为:正射影像模型为:
以目的图像建立坐标系,
(x
S3:阈值分割;利用颜色和梯度阈值结合的方式对分割正射影响内的车道线;
步骤S3的实现方式为:
利用颜色和梯度阈值结合的方式分割车道线。LAB,HSL,HSV三种模型对于提取白色和黄色的车道线有着不错的效果。LAB色彩模型B通道表示人眼黄色到蓝色的一个范围对于黄色的车道线比较敏感。由于地面相对于车道线比较暗,HSL色彩模型的L通道(亮度)和HSV的V通道(明度)对于车道线有很好的区分度。车道线二值化图像LAB颜色空间B通道HLS颜色空间L通道HSV颜色空间V通道阈值分割(160)阈值分割(140)阈值分割(180)RGB颜色空间。颜色阈值的局限在于光照条件不好的情况下难以区分出车道线,除了采用直方图均衡化提高图像亮度之外,这里结合了梯度阈值进行辅助分割图,利用颜色阈值分割结果较差,设置梯度阈值可以在光照条件不好的情况利用梯度提取出车道线的边缘,结合颜色阈值和梯度阈值的提取结果得到了车道线的二值化影像。
根据不同的数学模型,进行结合,从而达到针对不同光线和颜色的车道线进行阈值切割,从而得到车道线清楚的二值化影像。
S4:滑动窗口提取车道线;将车道线离散化为多个窗口,最底部的窗口开始通过对二值化图像的直方图统计获得车道线的起始点,二值化图像从底部由下往上进行滑动扫描,将扫描结果进行图示;
S5:跟踪车道线;通过单个窗口滤波和拟合参数滤波,得到更加平滑稳健的车道线,实现跟踪效果;
步骤S5的实现方式为:
车辆运动过程中,车道线在相片中的变化是一个缓变的过程,且前后帧相互关联。相片沿着y轴的窗口实际位置是由中心点的x坐标确定的。对于单个窗口,可以使用速度模型建立前后历元的关系:
q
z
ε为常数,z
并拟合出车道线。考虑到车道线一般分为直线和曲线两种模式,根据曲率大小的判断选择直线模型或二次曲线模型做拟合。
直线模型为:
二次曲线模型为:
a,b为常数,经过计算后得到每个窗口中心的位置为
由于前后帧车道线相似,模型参数变化较小,可以使用随机游走模型估计系数部分,常量参数使用白噪声进行估计,列出如下状态方程:
观测方程解得滤波后最终的车道线拟合参数。通过单个窗口滤波和拟合参数滤波,我们可以得到更加平滑稳健的车道线,尤其是在经过斑马线或车道线部分缺失的情况下可以实现良好的跟踪效果。
S6:车道生成;将扫描结果进行单应性变换与地面线上的车道线进行比对:
步骤S6的实现方式为:
车道线作为最常见的道路信息对车辆定位具有重要的价值。最常见的定位方式是车道线保持,让车辆始终处在车道线内,避免发生碰撞。目前高精度地图通常采用昂贵复杂的精密仪器去测量车道线的位置生成车道线底图。在城市复杂的多变的环境下要做到实时更新和维护车道线是非常耗时且昂贵的事情。为了改善这个问题,提取车道线的基础上提出了其生成方法以便应用在辅助定位中:车道线是在地面上的,和像平面构成了单应性变换的关系。
其中(x
(u,v)是像主点坐标,f是相机参数,b是双目基线,du是左右影像同名点u的差值,z为观测值。
只要相机在车辆的位置事先标定好我们就可以建立相片中的像素点与地面对应点的单应性关系H。当我们在相片中提取出车道线时,我们就可以利用单应性关系得到车道线相对于相机的相对距离。通过GNSS等传感器提供绝对位姿,我们就能得到车道线的绝对位置。这种方法简单方便,且效率高,对于车道线的维护和辅助定位有着重要的作用。
本发明提供的一种车道线提取与生成方法,与现有技术相比,图像预处理时得到图像的正射影像,得到正射影响后面对颜色阈值理想情况的路面采用LAB模型对黄色的车道线的良好区分度,HSL,HSV模型分别车道线的亮度,明度的良好区分度,从而对车道线进行提取合成,面对颜色阈值不理想的情况下,结合了梯度阈值进行辅助分割置,梯度阈值可以在光照条件不好的情况下提取出车道线的边缘。结合颜色阈值和梯度阈值的提取结果得到车道线的二值化影像,将车道线离散化为多个窗口,最底部的窗口开始通过对二值化图像的直方图统计获得车道线的起始点,二值化图像从底部由下往上进行滑动扫描,将扫描结果进行图示,再根据得到的扫描结果建立速度模型,根据速度模型与车道线进行拟合,以得到更加平滑稳健的车道线,经过斑马线或车道线部分缺失的情况下可以实现良好的跟踪效果,通过单个窗口滤波和拟合参数滤波,得到更加平滑稳健的车道线,再由得到的车道线构建数学模型,与地面车道线对应改善了在城市复杂的多变的环境下实时更新和维护车道线是非常耗时且昂贵的问题,提高了经济效应。
以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种车道线提取与生成方法
- 假想车道线生成装置与方法及车道线保持控制系统