管道内壁四足爬壁机器人及其运动学分析方法
文献发布时间:2023-06-19 11:19:16
技术领域
本发明涉及机器人技术领域,特别涉及一种管道内壁四足爬壁机器人及其运动学分析方法。
背景技术
管道广泛应用在我们生活的方方面面,比如城市大型下水管道、城市电网管道、燃气大型输送管道、水厂送水管路、工业输油管道、电网高压GIS管道开关等。但在面对各种各样的管路问题,比如堵塞、检修、泄露、老化等时,由于管路的特殊性,管道内的物质人体不易接触,且大部分也不宜直接接触到,管道也较为狭窄,人工也不易操作,因此对管道的维修检测造成了极大的困难,即使人工可达,但是效率也极其低下。因此很多学者针对管道问题研制专用的机器人代替人工进行操作。
四足爬壁机器人由于其独特的结构,自由度多,除了能够实现简单的前后左右,还可以实现转弯和强大的负载能力,因此越来越多地被使用在管道环境中。爬壁机器人在实际工作中,遇到的壁面一般也不是平面,大多数是弧面或因工艺误差、外力作用或杂质沉积形成的凹凸不平的表面,因此如何设计能在管道中灵活运动的四足爬壁机器人,如何对四足爬壁机器人进行运动控制,是目前的研究热点,其中四足爬壁机器人的运动学分析是运动控制的基础。
发明内容
本发明的第一目的在于克服现有技术的缺点与不足,提供一种管道内壁四足爬壁机器人,可在管道内灵活运动。
本发明的第二目的在于提供一种管道内壁四足爬壁机器人的运动学分析方法,可求出正逆运动学解,方便机器人的运动控制。
本发明的第一目的通过下述技术方案实现:
一种管道内壁四足爬壁机器人,包括腰关节、连接腰关节的四条腿和控制器,四条腿两两一组,分布在腰关节的左、右两侧,每条腿由髋关节、大腿关节、小腿关节、连接架和足端构成,髋关节、大腿关节、小腿关节均可旋转地安装在连接架上,且髋关节、大腿关节、小腿关节和足端通过连接架依次连接,同组的两条腿之间通过连接架相连接;控制器设于腰关节,控制器连接并控制每条腿的髋关节、大腿关节、小腿关节、足端。
优选的,髋关节、大腿关节、小腿关节均含有舵盘和安装在舵盘上的关节伺服电机,舵盘与连接架机械连接,舵盘与每个关节伺服电机的输出轴相连接,且随输出轴的转动而转动,每个关节伺服电机通过线缆连接至控制器。
优选的,两组腿在腰关节上对称分布,对于腰关节前、后两端的两个髋关节,其轴心线所在平面和腰关节上表面平行;大腿关节的关节轴心线和髋关节的关节轴心线连线相交且垂直;大腿关节的关节轴心线和小腿关节的关节轴心线相互平行;小腿关节的关节轴心线和足端对称轴轴心线相互平行。
优选的,腰关节上安装有摄像头,摄像头连接控制器,并由控制器控制。
优选的,足端为真空吸盘装置。
本发明的第二目的通过下述技术方案实现:
一种管道内壁四足爬壁机器人的运动学分析方法,包括如下步骤:
S1、构建管道基础坐标系{O}和机器人本体坐标系{E};
S2、通过管道基础坐标系和机器人本体坐标系的旋转变化,确定四足爬壁机器人在管道中的位置;
S3、根据四足爬壁机器人的关节位置,建立多个单腿坐标系:单腿坐标系{A0}与机器人本体坐标系{E}重合;单腿坐标系{A1}建立在髋关节的关节伺服电机轴心上,三轴方向与坐标系{A0}相同;单腿坐标系{A2}建立在大腿关节的关节伺服电机轴心上,其y
S4、通过单腿坐标系之间的旋转变化,得出四足爬壁机器人的正运动学解,基于正运动学解可确定四足爬壁机器人的关节和足端位置;
S5、再对正运动学解进行公式变换,得出四足爬壁机器人的逆运动学解,基于逆运动学解,给定足端目标位置即可求解出需控制的髋关节、大腿关节、小腿关节的旋转角度。
优选的,在步骤S1中,以管道的中心位置为原点,管道轴向为x轴方向,以垂直向上为y轴,z轴与x、y轴相垂直,建立管道基础坐标系{O};
以四足爬壁机器人的机械中心为原点,x轴与四足爬壁机器人的前进方向共线,垂直机身表面向上为y轴,z轴与x、y轴相垂直,建立机器人本体坐标系{E}。
优选的,步骤S2具体为:
设定四足爬壁机器人腰关节长2a,宽2b,高2c,髋关节L
定义机器人本体坐标系原点O
坐标系{E}相对{O}坐标系变换矩阵为:
式中:R(z,γ)、R(y,β)、R(x,α)分别表示坐标系绕z、y、x轴旋转的角度,L(L
即可通过三个已知的转角和位移,求得机器人机身的位姿矩阵,以量化机器人在管道中的位置和姿态;
在四足爬壁机器人运动过程中,给定具体的机器人起始姿态,机器人机身坐标系原点O
式中,R表示管道内径半径;
更进一步的,正运动学解的求解过程如下:
联立单腿坐标系{A5}和{A0}的旋转变换,单腿坐标系{A0}相对于坐标系{A5}的旋转矩阵为:
式中,θ
得出正运动学解:
其中,
更进一步的,对正运动学解进行公式变换,得到逆运动学解:
其中,
本发明相对于现有技术具有如下的优点及效果:
(1)本发明四足爬壁机器人中,四条腿分布在腰关节侧面,每条腿均设有三个关节,关节旋转角度不会受到机身限制,旋转范围大,可在管道内灵活运动。
(2)本发明四足爬壁机器人中,同组的两条腿通过连接架连接在一起,使得两条腿与腰关节共同形成一闭合回路,如此可以减少连接架的形变,进而提高关节的控制精度。
(3)本发明运动学分析方法构建了管道坐标系和机器人机身坐标系,对其坐标变换进行分析,得出变换规律与机器人姿态的关系,进而确定机器人的轴向、径向位置以及机器人机身偏转角度。根据关节的位置,建立多个单腿坐标系,通过坐标系之间的变换,得出机器人的正逆学解,可为后续的机器人控制提供理论基础。
附图说明
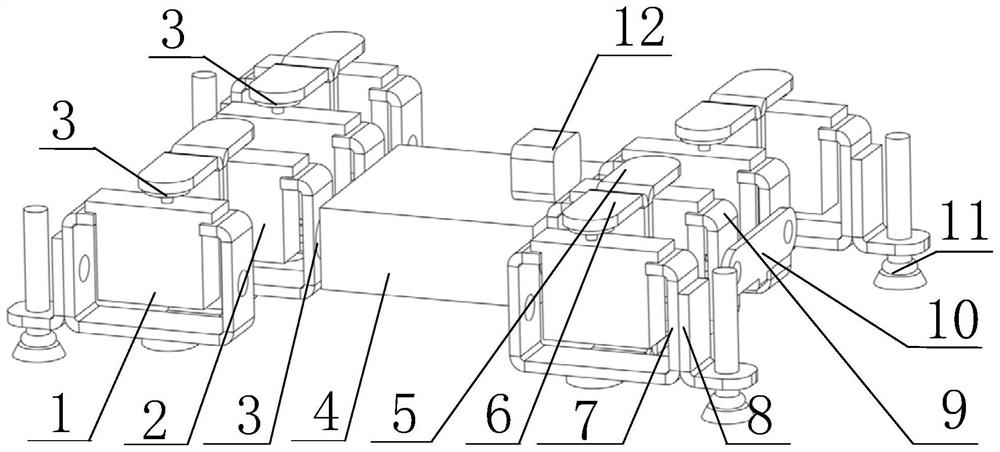
图1是本发明管道内壁四足爬壁机器人的示意图。
图2是本发明管道内壁四足爬壁机器人的俯视图。
图3是管道基础坐标系和机器人本体坐标系的示意图。
图4是起始状态下的机器人本体坐标系的示意图。
图5是单足坐标系的示意图。
附图中各标记所标号说明:
1:小腿关节;2:大腿关节;3:舵盘;4:腰关节;5:2号连接架;6:3号连接架;7:4号连接架;8:5号连接架;9:1号连接架;10:固定架;11:真空吸盘;12:摄像头。
具体实施方式
下面结合实施例及附图对本发明作进一步详细的描述,但本发明的实施方式不限于此。
本实施例公开了一种管道内壁四足爬壁机器人,如图1和图2所示,包括腰关节4、连接腰关节的四条腿和控制器。
腰关节作为机身本体,四条腿两两一组,对称分布在腰关节的左、右两侧。腰关节可采用金属板如5052铝板切割及组装成型。
每条腿由髋关节、大腿关节2、小腿关节1、连接架和足端构成。髋关节、大腿关节、小腿关节均可旋转地安装在连接架上,且髋关节、大腿关节、小腿关节和足端通过连接架依次连接。连接架可采用金属板如5052铝板制成。
对于腰关节前、后两端的两个髋关节,其关节轴心线所在平面和腰关节上表面平行,大腿关节的关节轴心线和髋关节的关节轴心线垂直,大腿关节的关节轴心线和小腿关节的关节轴心线相互平行,小腿关节的关节轴心线和足端对称轴轴心线相互平行。
髋关节、大腿关节、小腿关节均含有舵盘3和关节伺服电机,舵盘与连接架机械连接,本实施例是通过螺栓固定。关节伺服电机输出轴末端安装舵盘,随着输出轴的转动,使得舵盘、与舵盘连接的连接架和与连接架相固定的零件这整个部分一起转动。
足端可采用真空吸盘装置。真空吸盘装置的真空吸盘11可以通过真空管泄气和进气。机器人可以利用真空吸盘可靠地吸附在管道内壁面上。
在本实施例中,单腿通过串联结构连接,髋关节固定在机身上,髋关节输出轴的舵盘与1号连接架9固定,1号连接架与大腿关节相固定,大腿关节输出轴的舵盘和2号连接架5相连,2号连接架与3号连接架6相连,3号连接架和小腿关节电机输出轴舵盘相连,小腿关节电机和4号连接架7相连,4号连接架和5号连接架8相连,5号连接架和足端的真空吸盘11相连。
同组的两条腿之间还通过连接架相连接,如图1和图2所示,两条腿的1号连接架通过固定架10相连,使两条腿与腰关节共同连成一闭合回路,如此可以减少连接架的形变,进而提高关节的控制精度。另外,该另一连接架还可以通过固定杆连接至机身,以起到固定机身的作用。如图1所示,本实施例机器人参考壁虎的生物结构,四条腿直接设置在腰关节侧面,而不是位于腰关节下方,因此机身重心可以设置得更低,关节的旋转不会受到机身限制,因此旋转范围更大,运动更灵活。
控制器设于腰关节,本实施例是收容在腰关节内,每个关节伺服电机通过线缆连接至控制器,控制器可对每条腿的髋关节、大腿关节、小腿关节的旋转角度、足端对地面的吸附进行控制。具体来说,当机器人不需要动作时,关节伺服电机不工作,足端通过真空管泄气以吸附在壁面上;当机器人需要动作时,足端先通过真空管进气,关节伺服电机再工作,因此真空吸盘的真空状态是随着机器人的运动情况而变化的。
在本实施例中,腰关节上还安装有摄像头12,摄像头连接控制器,并由控制器控制,摄像头可将其采集的环境图像传输给控制器,以便了解机器人所在环境,更好地控制机器人。
另外,本实施例还公开了一种管道内壁四足爬壁机器人的运动学分析方法,该方法可应用于上述四足爬壁机器人中,具体包括如下步骤:
S1、构建管道基础坐标系{O}和机器人本体坐标系{E}:
如图3~图5所示,以管道的中心位置为原点,管道轴向为x轴方向,以垂直向上为y轴,z轴与x、y轴相垂直,建立管道基础坐标系{O};
以四足爬壁机器人的机械中心为原点,x轴与四足爬壁机器人的前进方向共线,垂直机身表面向上为y轴,z轴与x、y轴相垂直,建立机器人本体坐标系{E}。
S2、通过管道基础坐标系和机器人本体坐标系的旋转变化,确定四足爬壁机器人在管道中的位置:
设定四足爬壁机器人腰关节长2a,宽2b,高2c,髋关节L
坐标系{E}相对{O}坐标系变换矩阵为:
式中:R(z,γ)、R(y,β)、R(x,α)分别表示坐标系绕z、y、x轴旋转的角度;L(L
即可通过三个已知的转角和位移,求得机器人机身的位姿矩阵,以量化机器人在管道中的位置和姿态。
在四足爬壁机器人运动过程中,给定具体的机器人起始姿态,机器人机身坐标系原点O
式中,R表示管道内径半径。
S3、根据四足爬壁机器人的关节位置,建立多个单腿坐标系:如图5所示,单腿坐标系{A0}与机器人本体坐标系{E}重合;单腿坐标系{A1}建立在髋关节的关节伺服电机轴心上,三轴方向与坐标系{A0}相同;单腿坐标系{A2}建立在大腿关节的关节伺服电机轴心上,其y
S4、通过单腿坐标系之间的旋转变化,得出四足爬壁机器人的正运动学解:
联立单腿坐标系{A5}和{A0}的旋转变换,单腿坐标系{A0}相对于坐标系{A5}的旋转矩阵为:
式中:θ
得出正运动学解:
其中,
S5、再对正运动学解进行公式变换,得出四足爬壁机器人的逆运动学解:
其中,
因此,给定足端的目标位置(即给定x
上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
- 管道内壁四足爬壁机器人及其运动学分析方法
- 管道内壁四足爬壁机器人