基于Gauss-Seidel的高效分布式目标相位优化方法
文献发布时间:2023-06-19 11:22:42
技术领域
本发明属于信号与信息处理技术领域,涉及时间序列干涉合成孔径雷达的地表形变反演算法,具体是在DSInSAR技术的基础上,采用快速高效地同质点选取算法,自适应计算相干矩阵,并对基于相干矩阵加权的分布式目标相位优化模型采用高效的求解算法进行相位估计。
背景技术
时序干涉合成孔径雷达(Multitemporal Interferogrametric SytheticAperture Radar,MT-InSAR)是近年来提出的一种地形和地面沉降的高精度估计方法。针对传统InSAR技术反演结果精度易受大气延迟、轨道误差、外部高程误差影响的问题,时序InSAR技术利用时间序列上的多景SAR影像生成多幅干涉图,能够有效降低时空失相干的影像并去除大气延迟相位,进而可以进行长时间、高精度的地表形变分析。
MTInSAR技术主要研究两类后向散射体:永久散射体(Permanent Scatterers,PSs)和分布式散射体(Distributed Scatterers,DSs)。
PS的相位信息比较稳定,可以获取高精度的形变信息,主要对应城市范围的建筑物、桥梁、路灯等点状高相干目标,但是非城市范围与植被区高相干目标密度较低,限制了PSInSAR的适用范围,因此,融入DS的DSInSAR技术成为了当前的一个研究热点。
DS表现为散射特性均一、具有相同统计分布的邻接像元,主要对应农田、水泥地和植被覆盖区之类在大范围内保持较好的一致性的面状分布,这些目标大多存在于自然地域、场景后向散射强度较弱的区域,在自然界中分布广泛。在时间序列SAR影像中,虽然存在一些高信噪比的DS目标,但大部分DS目标易受时空失相干影响,相位信息不稳定。相比于PS、DS更易收到时间、几何和体积去相关的影响,所以进行参数估计前需要对DS进行预处理。然而现有预处理方法存在计算量大、计算效率低等缺点,在一定程度上限制了其工程应用。
发明内容
为高效获取更为全面的地表形变信息,本发明在现有DSInSAR技术的处理框架基础上,充分考虑相干矩阵的特性,针对基于相干矩阵加权的DS相位优化模型,给出高效地求解方案。具体地说,首先采用高效快速的FaSHPS算法工具包进行同质点选取,然后基于选取的同质点集合自适应估计相干矩阵,以降低异质像元对相干估计结果的影响;再基于同质点具有相同散射特征的假设,通过相干矩阵构建的优化模型进行DS相位优化;对于构建的非线性优化模型,基于Gasuss-Seidel的迭代思想进行高效求解,从而实现提高计算效率和算法鲁棒性的目的。
本发明所提的技术方案在进行具体的改进之前,首先进行时间序列SAR图像配准,然后计算每景SAR影像幅度均值,时间维影像幅度均值和校正因子以实现对影像幅度值的校正,并在精确轨道参数支持下,去除外部DEM在垂直方向上的误差来提高差分干涉图的精度。
为达到上述目的,本发明采取如下技术方案:
基于Gauss-Seidel的高效分布式目标相位优化方法,包括以下步骤:
S1.对于经过配准、幅度校正等预处理的时序SAR影像,在预设的搜索窗内,兼顾检测率和计算效率,采用FaSHPS算法工具包选取同质点(SHP)集合;
S2.基于选取的同质点集合自适应地计算相干矩阵,并构建基于相干矩阵加权的相位优化模型;
S3.对于构建的非线性优化模型,基于Gauss-Seidel迭代以求解DS相位重构结果。
作为优选方案,步骤S1具体实现如下:
1.1、首先对时序SAR影像进行配准、幅度校正等预处理。
由于FaSHPS算法是基于时序幅度均值进行同质点选取的。因此,选择SHP之前需要通过纠正因子把所有的SAR影像振幅归化到同一尺度下。这里简要描述下幅度校正流程。
(1)计算每景SAR影像幅度均值
其中,m×n为研究区域SAR影像大小,t表示影像的接收时间序列,
(2)计算时间维影像幅度均值的平均值
其中,N表示影像数量。
(3)计算每景影像的校正因子
(4)对每景影像进行幅度校正
A
其中,A
1.2、兼顾检测率及效率,采用快速的FASHPS算法工具包进行同质点选取。
该算法基于幅度均值选取SHP,首先在时间维度均值处理可以降低噪声影响,减少了InSAR协方差矩阵中的噪声;其次基于一维数据选取同质点,极大地提高了算法的效率;同时,保持了SAR图像的空间分辨率,所选像素的值在统计上可以看作是来自同一总体的样本,用于后续的参数估计。
在SAR图像幅度服从瑞利分布的假设下,基于如下的近似区间估计选取SHP:
其中,μ(p)代表像素p总体均值,N为影像个数,L为SAR影像的视数,α为假设检验中的显著性水平。
作为优选方案,步骤S2具体实现如下:
2.1、基于选取的同质点集合自适应地计算相干矩阵。
选取N幅已配准SAR图像中,将每个像素p可描述为一个复数据向量
d(p)=[d
式中,T代表矩阵转置,d
对于SAR图像的均质区域,复向量d(p)服从多元概率密度函数
其中,H代表对向量d的共轭转置,S∈C
协方差矩阵可以表示为:
其中,Ω
因此,基于选取的同质点集合计算相干矩阵得到为:
上式中,x是标准化复观测值向量,x(q)=[x
x
其中,E(·)表示数学期望。
2.2、构建基于相干矩阵的相位优化模型
在SqueezeSAR技术中,基于同质像元具有相同相位信息的假设条件下,SHP集合Ω的联合概率密度可表示为:
式中,Θ为对角矩阵且对角元素λ=[θ
式中,θ
相位三角部分算法(PTA)实际执行中需计算Υ
为避免矩阵求逆,充分考虑复相干系数的特点,本发明采用如下基于相干矩阵加权的改进模型:
其中,
该模型避开了矩阵求逆过程,简化了处理流程,只需要预先估计相干矩阵。相干矩阵中元素的相干系数是InSAR数据质量直接的衡量标准,利用相干矩阵加权可以抑制低相干干涉信息对估值的影响,因此采用该模型来优化相位信息。
作为优选方案,步骤S3的具体实现如下:
在PTA和phase linking算法中,DS相位优化模型可表示为:
其中,
在phase linking算法中,模型求解的迭代公式为:
近年来,高效的phase linking算法在工程应用中得到了广泛的应用。
对于非线性优化模型,phase liking采用Jacobi迭代格式,迭代过程中无须计算主函数的导数,在计算性能上优于PTA方法。然而,下一个迭代解向量
该模型作为Jacobi迭代的修正格式。不仅仅对原本的迭代模型右侧的所有项使用先前的迭代值,并且在方程中立即使用迭代向量的新计算分量。
相比于现有经典的phase linking方法,本发明在优化模型构建时避免了矩阵求逆处理,在模型求解时充分利用迭代中最新计算得到结果,可以在不增加每次迭代计算量的同时降低算法收敛时的迭代次数,从而实现了高效的DS相位估计。
附图说明
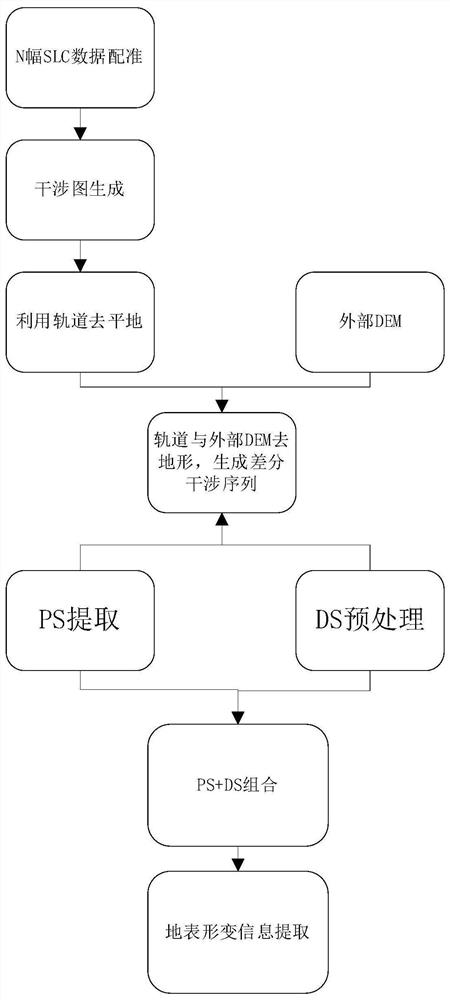
图1为DSInSAR流程图。
图2为时序SAR影像预处理流程图。
图3为相位优化方法处理流程图。
图4为不同影像个数下的执行时间及EPC均值。
具体实施方式
下面对本发明优选实施例作详细说明。
本实施例基于Gauss-Seidel的高效分布式目标相位优化方法,包括以下步骤:
S1.对于经过配准、幅度校正等预处理的时序SAR影像,在预设的搜索窗内,兼顾检测率和计算效率,采用FaSHPS算法工具包选取同质点(SHP)集合;
步骤S1具体实现如下:
1.1、首先对时序SAR影像进行配准、幅度校正等预处理。
由于FaSHPS算法是基于时序幅度均值进行同质点选取的。因此,选择SHP之前需要通过纠正因子把所有的SAR影像振幅归化到同一尺度下。这里简要描述下幅度校正流程。
(1)计算每景SAR影像幅度均值
其中,m×n为研究区域SAR影像大小,t表示影像的接收时间序列,
(2)计算时间维影像幅度均值的平均值
其中,N表示影像数量。
(3)计算每景影像的校正因子
(4)对每景影像进行幅度校正
A
其中,A
1.2、兼顾检测率及效率,采用快速的FASHPS算法工具包进行同质点选取。
该算法基于幅度均值选取SHP,首先在时间维度均值处理可以降低噪声影响,减少了InSAR协方差矩阵中的噪声;其次基于一维数据选取同质点,极大地提高了算法的效率;同时,保持了SAR图像的空间分辨率,所选像素的值在统计上可以看作是来自同一总体的样本,用于后续的参数估计。
在SAR图像幅度服从瑞利分布的假设下,基于如下的近似区间估计选取SHP:
上式中,μ(p)代表像素p总体均值,N为影像个数,L为SAR影像的视数,α为假设检验中的显著性水平。
S2.基于选取的同质点集合自适应地计算相干矩阵,并构建基于相干矩阵加权的相位优化模型。步骤S2具体实现如下:
2.1、基于选取的同质点集合自适应地计算相干矩阵。
选取N幅已配准SAR图像中,将每个像素p可描述为一个复数据向量
d(p)=[d
式中,T代表矩阵转置,d
对于SAR图像的均质区域,复向量d(p)服从多元概率密度函数
其中,H代表对向量d的共轭转置,S属于C
协方差矩阵可以表示为:
其中,Ω
因此,基于选取的同质点集合计算相干矩阵得到为:
上式中,x是标准化复观测值向量,x(q)=[x
x
其中,E(·)表示数学期望。
2.2、构建基于相干矩阵的相位优化模型
在SqueezeSAR技术中,基于同质像元具有相同相位信息的假设条件下,SHP集合Ω的联合概率密度可表示为:
式中,Θ为对角矩阵且对角元素λ=[θ
式中,θ
相位三角部分算法(PTA)实际执行中需计算Υ
为避免矩阵求逆,充分考虑复相干系数的特点,本发明采用如下基于相干矩阵加权的改进模型:
其中,
该模型避开了矩阵求逆过程,简化了处理流程,只需要预先估计相干矩阵。相干矩阵中元素的相干系数是InSAR数据质量直接的衡量标准,利用相干矩阵加权可以抑制低相干干涉信息对估值的影响,因此采用该模型来优化相位信息。
S3.对于构建的非线性优化模型,基于Gauss-Seidel迭代以求解DS相位重构结果。步骤S3的具体实现如下:
在PTA和phase linking算法中,DS相位优化模型可表示为:
其中,
在phase linking算法中,模型求解的迭代公式为:
近年来,高效的phase linking算法在工程应用中得到了广泛的应用。
对于非线性优化模型,phase liking采用Jacobi迭代格式,迭代过程中无须计算主函数的导数,在计算性能上优于PTA方法。然而,下一个迭代解向量
该模型作为Jacobi迭代的修正格式。不仅仅对原本的迭代模型右侧的所有项使用先前的迭代值,并且在方程中立即使用迭代向量的新计算分量。
下面结合实例数据对本发明作进一步说明。
基于典型的X波段平台参数,生成22天的模拟数据。对于给定的N,选取[N/2]幅图像作为主图像,在一个9×9窗口内计算一组相干矩阵。时间去相干系数采用指数衰减模式,方向位与距离向分辨率均设为3米,系统参数采取与卫星TerraSAR-X的实测数据保持一致。假设像元服从零均值的高斯分布,噪声基于协方差矩阵的Cholesky分解产生,仿真场景大小为64×64。由于场景较小,可近似认为仿真场景中的像元属于同一地物。
将给定像素p在第n次采集时的相位观测值设为:
式中,λ、θ、R分别为雷达波长、局部入射角和目标与传感器之间的距离;
为保证结果的可靠性,每次实验重复执行100次,采用EPC(Ensemble PhaseCoherence)均值评估结果的可靠性,EPC计算公式为:
式中,y
Gauss-Seidel迭代公式比Jacobi迭代法收敛速度更快,并且在每次计算中不增加计算量。另外,在整个模型求解过程中只需要存储一个迭代向量,同一个数组可以存储上一次的迭代值和当前的迭代值。该方法有效且易于实现,收敛速度快,易于逐像素并行化处理,尤其适用于大规模数值问题。同时,仿真实验结果表明,数据集的栈大小越大,该方法的效率提高越快。
本领域技术人员将认识到,对以上描述做出众多变通是可能的,所以实施例仅是用来描述一个或多个特定实施方式。尽管已经描述和叙述了被看作本发明的示范实施例,本领域技术人员将会明白,可以对其做出各种改变和替换,而不会脱离本发明的精神。另外,可以做出许多修改以将特定情况适配到本发明的教义,而不会脱离在此描述的本发明中心概念。所以,本发明不受限于在此披露的特定实施例,但本发明可能还包括属于本发明范围的实施例及其等同物。
- 基于Gauss-Seidel的高效分布式目标相位优化方法
- 一种基于PS目标时空间相干矩阵的极化相位优化方法