一种波浪补偿舷梯用人员随动平台
文献发布时间:2023-06-19 11:24:21
技术领域
本发明属于波浪补偿舷梯技术领域,具体为一种波浪补偿舷梯用人员随动平台。
背景技术
21世纪是海洋经济可持续发展的时代,海洋是自然资源的宝库。越来越多的船舶和海上作业平台被投入使用。如海上大型石油、天然气开发平台,风电场与海上变电站,浮式码头与海上生活平台等。然而海上环境恶劣、可进入性差。深海作业船舶受到深海风浪和海浪的影响,波浪补偿舷梯是的船舶和海上作业平台最为重要的工具,现有技术条件下,波浪补偿舷梯的其中1个自由度是通过伸缩机构进行补偿,它会根据波浪补偿的需要,实时调整伸缩机构的幅度。波浪越大,伸缩机构的伸缩幅度也就越大,同时,舷梯固定部分和伸缩部分相对位置的变化也就越大,人员在通过舷梯登陆风电平台时,必须经过舷梯固定部分和伸缩部分的交界线,由于这两部分的相对位置一直在不断变化,交界线也在不断变化,人员经过时,由于交界线在不断变化,所以会产生一定的安全隐患,通过效率也会有所降低。
发明内容
针对现有技术存在的上述问题,本发明所要解决的技术问题在于提供一种波浪补偿舷梯用人员随动平台,以解决目前的波浪补偿舷梯与伸缩舷梯之间不断变化,人员行走存在安全隐患,通行效率低下的问题。
为了解决上述技术问题,本发明采用的技术方案为:
一种波浪补偿舷梯用人员随动平台,包括滚轮、平台框架、液压马达、光栅传感器和伸缩舷梯,所述伸缩舷梯的一端设置有平台框架,且平台框架与伸缩舷梯之间设置有滚轮,所述平台框架上设置有马达支架,马达支架上设置有液压马达,且液压马达的一端设置有齿轮,所述伸缩舷梯的一端上侧设置有齿条,且齿条与齿轮相配合,所述平台框架上设置有光栅传感器。
进一步的,所述伸缩舷梯的一端设置有滑动框架,且滑动框架的内端面设置有滑动槽,所述滑动槽与滚轮相配合。
进一步的,所述平台框架的两侧均匀设置有转轴,且转轴上设置有滚轮,且滚轮镶嵌在滑动槽内。
进一步的,所述平台框架上端面的两侧分别设置有马达支架,且马达支架与液压马达为固定连接。
进一步的,所述齿条的下端面与滑动框架的上端面为固定连接,且齿条的长度与滑动框架的长度一致。
进一步的,所述平台框架的上端面和伸缩舷梯的上端面均设置有防滑螺纹。
进一步的,所述伸缩舷梯与滑动框架连接的端面设置有防撞橡胶。
进一步的,所述光栅传感器位于平台框架两侧支架的中间位置。
有益效果:与现有技术相比,本申请具有以下优势:
该波浪补偿舷梯用人员随动平台通过控制系统和算法能精准控制液压马达,使液压马达带动平台移动,使平台对波浪补偿舷梯和伸缩舷梯相对位移和相对静止,使人员踩在平台框架上通过时更加稳定,大大减少了安全隐患,使人员在通过时有一个相对静止的过渡平台,保证了人员输送的安全性和便利性,而且该人员随动平台自动化程度比较高,大大提高了通行效率。
附图说明
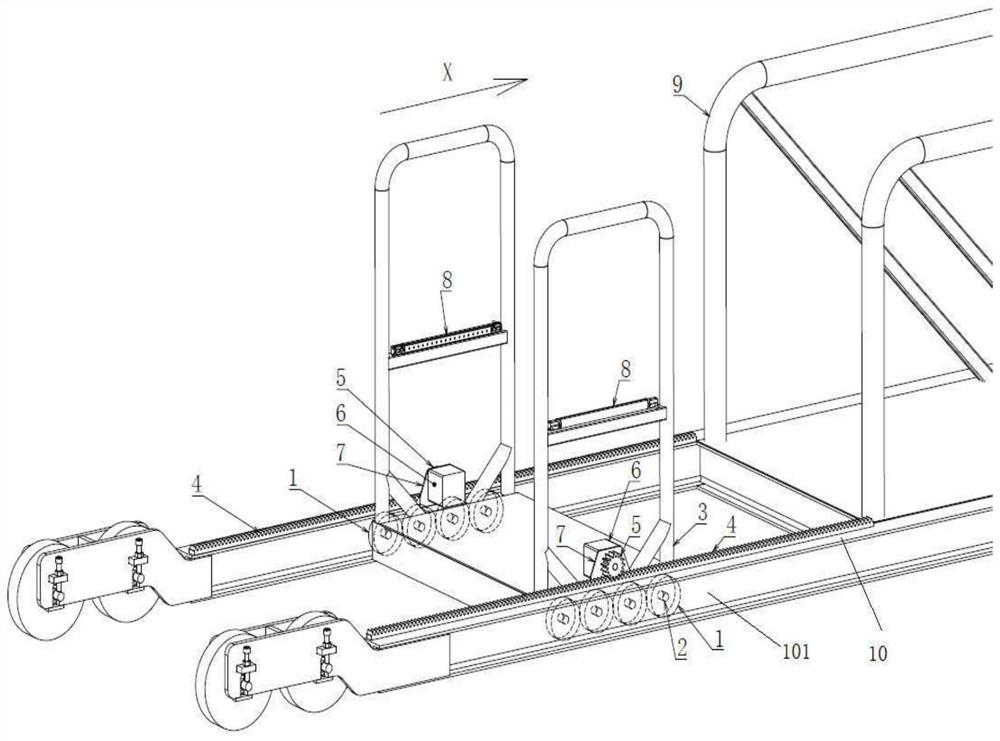
图1是波浪补偿舷梯用人员随动平台结构示意图。
具体实施方式
下面结合附图对本发明做进一步的说明。
如图1所示,本申请的波浪补偿舷梯用人员随动平台,包括滚轮1、平台框架3、液压马达6、光栅传感器8和伸缩舷梯9,伸缩舷梯9的一端设置有平台框架3,且平台框架3与伸缩舷梯9之间设置有滚轮1,滚轮1一方面起到对平台框架3的支撑作用,另一方那面方便平台框架3的移动,平台框架3可以在伸缩舷梯9的一侧滑动,保证后期液压马达6能够控制平台框架3移动,平台框架3上设置有马达支架7,马达支架7上设置有液压马达6,马达支架7对液压马达6起到一个支撑的作用,也保证液压马达6足够的强度,且液压马达6的一端设置有齿轮5,伸缩舷梯9的一端上侧设置有齿条4,且齿条4与齿轮5相配合,液压马达6带动齿轮5旋转,齿轮5带动平台框架3在伸缩舷梯9上运动,平台框架3上设置有光栅传感器8,控制室根据检测到的波浪变化,通过现有的算法精准控制油压马达6的旋转,驱动该平台框架3按照指令精确移动,从位置上来看,平台框架是安装在伸缩舷梯9一端的滑动框架10上的,当人员在波浪补偿舷梯的固定部分,准备进入伸缩舷梯9上面的时候,该平台框架3就通过液压马达6、齿轮5和齿条4的驱动,不断调整平台框架3和伸缩舷梯9的相对位置,以保持平台框架3和波浪补偿舷梯的固定部分相对静止,即使海上风浪在摇晃船只,伸缩舷梯9在不停的伸缩,平台框架3和波浪补偿舷梯的固定部分都是相对静止的,这样人员就能安全地进入平台框架3上面。当平台框架3上面上的光栅传感器8检测到有人进入,平台框架3就会通过液压电机6就缓慢运动,以靠近伸缩舷梯9的一端,当碰到伸缩舷梯9防撞橡胶的时候就停下来,并保持平台框架3和伸缩舷梯9相对静止,人员即可安全地进入伸缩舷梯9。当平台框架3上面上的光栅传感器8检测不到人员时,就继续返回,以保持平台框架3和波浪补偿舷梯的固定部分相对静止,保证下一个人员的进入,大大提高了通行效率,减少了安全隐患。
伸缩舷梯9的一端设置有滑动框架10,伸缩舷梯9与滑动框架10为一体化结构,保证伸缩舷梯9和滑动框架10的整体强度,且滑动框架10的内端面设置有滑动槽101,滑动槽101与滚轮1相配合,保证滑动框架10对平台框架3的支撑力,也能保证滑动框架10能够在滑动框架10来回滑动。
平台框架3的两侧均匀设置有转轴2,且转轴2上设置有滚轮1,且滚轮1镶嵌在滑动槽101内,平台框架3的两侧设置有多个滚轮1,大大提高平台框架3的支撑力,也能进一步的防止平台框架3倾斜。
平台框架3上端面的两侧分别设置有马达支架7,保证平台框架3的两侧都设置有液压马达6,2个液压马达6共同施力,能够保证平台框架3的运输能力,放置意外停止移动的情况出现,当一个液压马达6出现问题的时候,另外一个可以正常运作,降低安全隐患,且马达支架7与液压马达6为固定连接,
提高连接强度,保证液压马达6足够的稳定性。
齿条4的下端面与滑动框架10的上端面为固定连接,保证齿条4与滑动框架10连接强度和稳定性,且齿条4的长度与滑动框架10的长度一致,保证平台框架3能够完全在整个滑动框架10上滑动,保证平台框架10能够完整把人员运走。
平台框架3的上端面和伸缩舷梯9的上端面均设置有防滑螺纹,提高摩擦力,防止人员滑道,发生安全问题,提高安全性。
伸缩舷梯9与滑动框架10连接的端面设置有防撞橡胶,起到一定的缓冲作用。
光栅传感器8位于平台框架3两侧支架的中间位置。
人员从安装在船舶上的舷梯进入风电平台的时候,当舷梯远端和风电平台完成对接,系统进入被动补偿模式之后,整个平台框架可以相对于伸缩舷梯9沿X轴前后移动,使整个平台框架3相对于波浪补偿舷梯的固定部分是静止的,人员首先要经过波浪补偿舷梯的固定部分,再登上相对静止的平台框架3的踏板上,光栅传感器8检测到人员后,延迟2~3秒,液压马达6的启停和延迟由现有的PLC(可编程逻辑控制器)来控制,等人员站稳就控制液压马达6缓慢变速,通过齿条4和齿轮5的传动,使随动平台框架3能够缓慢移动至靠近伸缩舷梯9部分的踏板处,并慢慢停下保持相对静止,人员再从平台框架3上进入伸缩舷梯9上,光栅传感器8检测到人员离开后,延迟2~3秒,继续回到合适的位置,并和波浪补偿舷梯的固定部分保持相对静止的状态,,做好下一个人员转运的准备,液压马达6由液压系统中的伺服电磁阀来控制,伺服电磁阀再由现有的电气部分控制,伸缩舷梯9部分和舷梯固定部分的相对位移可以通过现有的绝对值编码器实时检测,知道位移变化后,就能用伺服电磁阀精确控制液压马达6,使平台框架3也同步移动,就能和波浪补偿舷梯的固定部分相对静止了,由于平台框架3是安装在伸缩舷梯9上的,所以需要和伸缩舷梯9部分相对静止的话,只要停止动作即可。
本发明提供了一种波浪补偿舷梯用人员随动平台的思路及实施方法,具体应用途径很多,以上仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进,这些改进也应视为本发明的保护范围。
- 一种波浪补偿舷梯用人员随动平台
- 一种变幅油缸独立控制的波浪补偿舷梯