传感器组件
文献发布时间:2023-06-19 11:26:00
本发明涉及一种传感器组件。本发明尤其涉及一种在与安全性相关的应用中的传感器组件、例如一种用于控制机动车辆上的功能的传感器组件。
在机动车辆上可以控制对机动车辆的驾驶功能有影响的功能。该功能尤其可以由机动车辆的驾驶员借助于输入设备来控制,该输入设备将致动元件的机械运动转换为控制信号。如果该功能被无意间控制,则可能危及机动车辆的运行安全。必须以更加功能安全的方式来实施输入设备,以防止功能故障。
为此,可能必须遵守某些有关功能安全的国家标准或国际标准,例如根据ISO26262或IEC 61508的输入设备的预先确定的ASIL能力。为了遵守这些标准而已知有不同的措施,这些措施通常包括冗余地设计一个或多个元件。这样的输入设备可能是昂贵的。
本发明所基于的目的之一在于提供一种传感器组件和一种控制方法,以便尽可能成本有效的地以更加功能安全的方式来控制机动车辆上的功能。本发明借助于独立权利要求的主题来实现这个目的。从属权利要求给出优选的实施方式。
根据本发明的第一方面,一种用于控制机动车辆上的功能的传感器组件包括:用于提供磁场的电线圈;磁场传感器;以及磁通量元件,所述磁通量元件用于引导所述线圈与所述磁场传感器之间的所述磁场。所述磁通量元件以可运动的方式被支承并且被成形成使得在所述磁场传感器的区域中占主导的所述磁场与所述通量元件的位置相关。还设置有处理装置,所述处理装置用于基于借助于所述磁场传感器所确定的所述磁场来确定所述通量元件的位置。
线圈尤其可以被设计为电路板上的结构,从而使得并不需要专门的构件。此外,线圈还可以优选被安置在磁场传感器的下方。在此,有利地充分利用如下磁场的强度,该磁场在磁场传感器中产生足以在电流较小的情况下模拟磁场传感器的信号强度。
由此可以实现以无接触、抗干扰的方式扫描通量元件的位置。通量元件尤其可以是机动车辆上的输入装置的部件,其中通量元件的运动可能是在机械方面受限的,例如受限于预先确定的运动路径、沿预先确定的轴线的移位或绕预先确定的轴线的旋转。磁通量元件可以是非对称地设计的,以便因此在通量元件的位置或取向发生变化的情况下促使由磁场传感器所扫描的磁场发生变化。
可以节省用于永磁体的成本。控制磁场的强度,以辅助测量过程。可以以改进的方式校准或调整该布置,以便提高测量精确度。可以借助于恒定的磁场来确定位置。磁场传感器进一步优选地被实施为微电子的或微机械的结构元件,从而使得该结构元件可以以经改进的方式连接至被实施为微型计算机的处理装置。此类集成式传感器可以以各种实施方式获得。
提出的是:处理装置被配置成用于使流过所述线圈的电流发生变化并且用于确定借助于所述磁场传感器所确定的所述磁场的变化是否与基于所述电流的变化的预期变化相对应。换言之,处理装置可以检查传感器组件的功能能力,其方式为以不同强度的磁场来检查对磁场的确定。
传感器组件由此可以(例如根据ISO 26262)满足对安全关键的部件的要求。为此不一定要冗余地实施磁场传感器。通过使用标准结构元件能够降低针对传感器组件的成本。可通过所提出的动态原理来实现的安全性能够高于同类冗余的安全性。采购磁场传感器的传感器组件制造商可以凭自己在不依赖于传感器的不受他影响的特性的情况下确保组件的安全性。
如果所观察到的磁场与所预期的磁场在预先确定的范围内不一致,则可以输出故障信号。此外可以尝试通过使借助于线圈所提供的磁场发生变化来恢复对通量元件的位置的确定。替代性地,可以仅对位置确定进行适配,例如其方式为可以以预先确定的方式对磁场传感器的测量值进行适配。这种适配尤其可以包括测量值的缩放。
在一个实施方式中,磁通量元件被成形成使得在磁场传感器的区域中占主导的磁场的强度与通量元件的位置相关,其中该磁场传感器被配置成用于确定在其区域占主导的磁场的强度。在另一个实施方式中,磁通量元件被成形成使得替代于强度或除了强度之外在磁场传感器的区域中占主导的磁场的方向也与通量元件的位置相关。在此磁场传感器被配置成用于确定在其区域中占主导的磁场的方向。有利地,对方向的确定可以是更可靠的或者可以经受减小的确定误差。
通量元件能够关于预先确定的轴线运动,其中线圈和磁场传感器关于这个轴线轴向地彼此偏置。通量元件在此可以以沿轴线可移位或可绕该轴线旋转的方式被支承。也可以设想(例如沿螺旋线的)经组合的运动。轴线优选穿过线圈朝向在那里所提供的磁场的方向而延伸。由于轴向偏置,通量元件可以在通量密度较大的区域中接收由线圈提供的磁场并且因此以经改进的方式朝向磁场传感器的方向引导该磁场。由此可以增大磁场传感器的有效信号。
所述通量元件可以被成形成使得所述通量元件与所述磁场传感器之间的间隙的宽度与所述通量元件的位置相关。间隙的宽度可以控制磁场传感器的区域中的磁场的强度,其中较大的间隙可以与较小的磁场相对应并且较小的间隙可以与较大的磁场相对应。于是可以基于磁场的强度来确定通量元件的位置。附加地,还可以将磁场的与位置相关的方向纳入到位置确定中。
所述磁场传感器可以被配置成用于沿多个不同的空间方向来确定所述磁场。为此,磁场传感器可以包括分别用于在某个空间方向上确定磁场的单独的设备。通过磁场传感器可以沿空间方向相对于彼此单独地提供强度。替代性地,磁场的方向和强度可以在磁场传感器方面例如被确定为矢量变量,并且可以提供其分量。在一个实施方式中,磁场传感器被形成为二维或三维作用的传感器。由于若干所设置的设备,磁场传感器可以具有冗余性。如果这些设备中的一个设备失效,则传感器组件可以基于另一个设备可以继续工作。为此,所述磁场传感器优选被安置成使得在所述通量元件的位置发生变化的情况下所述磁场传感器处的所述磁场沿至少两个空间方向发生变化。
根据第二方面,一种用于控制机动车辆上的功能的方法包括以下步骤:借助于电线圈提供磁场;确定在磁场传感器的区域中占主导的磁场;其中以可运动的方式支承有磁通量元件,所述磁通量元件被配置成用于引导所述线圈与所述磁场传感器之间的所述磁场;其中所述磁通量元件被成形成使得在所述磁场传感器的区域中占主导的所述磁场与所述通量元件的位置相关;并且基于借助于所述磁场传感器所确定的所述磁场来确定所述通量元件的位置。
可以完全或部分地在本发明所描述的传感器组件上执行该方法。尤其可以借助传感器组件的被设计为微型计算机或微型控制器的处理装置来实施该方法。该方法在此可以存在为具有程序代码媒介的计算机程序产品。计算机程序产品可以被存储在计算机可读的数据载体中。该方法的优点或特征可以转移至本发明所描述的设备,或者反之亦然。
在一个优选的实施方式中,还使流过所述线圈的电流发生变化并且确定借助于所述磁场传感器所确定的所述磁场的变化是否与基于所述电流的变化的预期变化相对应。优选周期性地在位置确定与功能确定之间进行切换。还可以针对不同的磁场依次确定位置,以便例如检测出如下缺陷,即,在该缺陷下,磁场传感器的信号并未以预期的方式与借助于线圈所提供的磁场相关(例如由于叠加了外部磁场)。
用于确定通量元件的位置的电流方向和用于检查传感器组件的电流方向可以具有相反的极性。由此也可以在传感器组件的常规测量参数之外进行检查。由此可以提高确定当前缺陷的可能性。
本发明还包括根据上述说明的传感器组件在车辆的旋转开关中用于确定旋转开关的旋转位置的用途。在此,线圈可以沿旋转开关的旋转轴线来定位。磁通量元件可以与旋转开关的轴或其他可移动的部件相连接。
现在将参照附图对本发明进行更详细的描述,在附图中:
图1示出输入设备;
图2示出方法的流程图;
图3示出磁通量元件的实施方式;
图4示出传感器组件上的各次测量的示例性的时间曲线图;以及
图5示出线圈的实施方式的俯视图。
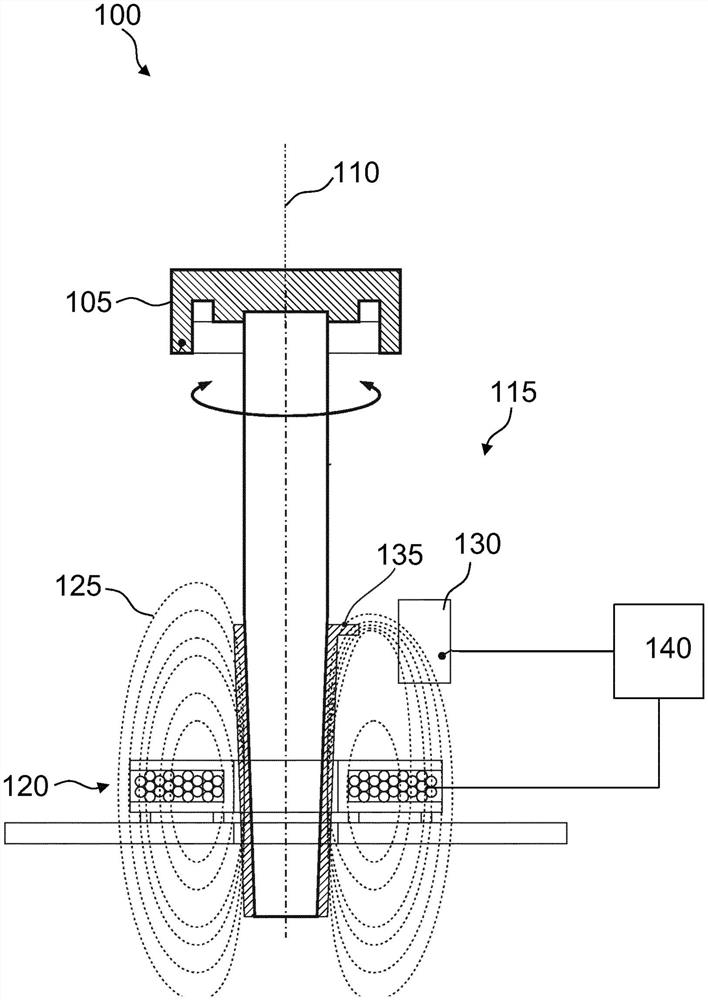
图1以纵截面示出穿过示例性的输入设备100的示意性图示,该输入设备尤其被配置成用于在机动车辆上使用。输入设备100被配置成用于提供指示机械致动的信号并且可以尤其用于将驾驶员的期望输入到可以影响机动车辆的功能(尤其运动)的设备上。输入设备例如可以用于预先选择或接合传动装置中的挡位级,该传动装置是机动车辆的动力传动系的部件。
输入设备100包括致动元件105和传感器组件115,该致动元件被布置成可绕轴线110运动。在此假设致动元件105能够相对于传感器组件115进行一维运动。在所展示的实施方式中,致动元件105以可绕轴线110旋转的方式被支承,然而也同样可能可以沿轴线110移位。
传感器组件115包括用于提供磁场125的电线圈120,其中线圈120优选被安置成与轴线110大体上共轴。在理想情况下,线圈120的缠绕轴线与轴线110重合或尽可能平行。传感器组件115还包括磁场传感器130以及磁通量元件135,该磁通量元件被配置成用于在线圈120与磁场传感器130之间引导磁场125。为此,通量元件135可以优选由磁阻较小的材料制成,例如由软磁铁(尤其具有处于约100至10,000的范围内的磁导率)制成。
例如借助于所展示的锥形夹紧或还借助于以其他方式进行的粘合或压合,通量元件135可以被安置在致动元件105处。形状配合的或力配合的安置同样是可行的。致动元件105可以优选由磁阻较高的材料(尤其具有大约1的磁导率)制成。致动元件105可以是顺磁性的或反磁性的并且包括例如铝或塑料。高磁阻用于使磁场传感器130的区域中的磁场125大体上与致动元件105的特性无关。替代于此,磁场传感器130处的磁场125应尽可能仅与通量元件135的特性和位置有关。在另一个变体中,致动元件105和通量元件135被实施成相互整合的,从而使得由仅一个构件同时满足进行力传递并且对磁场125进行引导的功能。
磁场传感器130优选被安置成相对于线圈120关于轴线110轴向偏置。同样轴向延伸的通量元件135将磁场125引导或传导到磁场传感器130的区域中。在此,通量元件135尤其在朝向磁场传感器130的轴向区域中被设计成使得磁场传感器130处的磁场125的强度和/或方向与可运动的通量元件135的位置相关。在所展示的实施方式中,通量元件135为此包括径向伸出部,该径向伸出部根据致动元件的旋转位置而或多或少地朝向磁场传感器130的方向延伸。通量元件135与磁场传感器130之间的间隙的宽度(以及因此磁场125的强度)可以因此与致动元件105的旋转位置相关。在伸出部对应地成形的情况下,在磁场传感器130的区域中的磁场125的方向还可以与通量元件135的位置相关。
可以设置有处理装置140来确定通量元件135的位置或与该通量元件相连接的致动元件105的位置。在此,处理装置140可以确定并控制通过线圈120的电流,并且可以利用磁场传感器130来检测指示在该磁场传感器的区域中占主导的磁场125的信号。
磁场传感器130例如可以是基于材料的电阻由于施加外部磁场而发生变化的磁阻效应的,例如各向异性磁阻效应(AMR效应)、巨磁阻效应(GMR效应)、超大磁阻效应(CMR)、隧道磁阻(TMR)或平面霍尔效应。磁场传感器130优选被构造为集成式半导体。在此,该集成式半导体可以沿一个或多个空间方向在方向和/或强度方面确定磁场125。
空间方向可以两两相互垂直并且也被称为维度。磁场传感器130尤其可以被配置成用于以二维(2D)或三维(3D)的方式来执行对磁场125的确定。向外提供的信号可以包括磁场125沿各个空间方向的强度或者例如可以被指定为就值和相对于空间方向的方向而言的矢量。如果磁场传感器130被配置成用于沿多于一个空间方向来确定磁场125,则优选的是,磁场传感器130在磁场125中被定向成使得通量元件130的位置变化所引起的磁场125的变化涉及多于一个(在理想情况下所有)所扫描的空间方向。
提出的是,处理装置140被配置成用于替代于进行位置确定或除了进行位置确定之外还执行对传感器组件115的检查。为此,该处理装置尤其可以通过对流过线圈120的电流进行适配来使线圈120所提供的磁场125发生变化。在变化前以及变化后,该处理装置可以确定在磁体传感器130的区域中占主导的磁场125。基于这两次测量可以确定所测得的磁场125的变化是否与基于电流变化而预期到的变化相对应。为此优选地,磁场传感器130被配置成用于以数字方式以足够多的阶(Stufen)或以模拟方式确定磁场125。即使仅是要将通量元件135的两个位置彼此区分开,二元指示的磁场传感器130也不足以进行检查。
图2示出方法200的流程图。方法200可以在传感器组件115上实施,并且严格来说,该方法包括用于确定通量元件135的位置的第一方法、以及用于检查传感器组件115的功能能力的交叉的第二方法。由于这些方法共同具有某些步骤,并且通常两种结果是相关的,因此即使也能够各自独立地执行第一方法和第二方法,所展示的方法200也提供两种结果。
在第一步骤205中使得第一电流受控通过线圈120。在步骤210中,通过例如扫描磁场传感器130的测量值来确定在磁场传感器130的区域中产生的第一磁场125。在操控与测量之间可以等待预先确定的时间,直到磁场125稳定。可以存储已确定的第一磁场125。在任选的步骤215中,可以基于已确定的第一磁场125来确定通量元件135的位置。可以向外部(例如向数据总线或控制器)提供已确定的位置。
在步骤220中使得第二电流受控通过线圈120。该第二电流不同于第一电流并且优选地也不等于零。在步骤225中执行对磁场125的第二次确定。步骤220和步骤225大体上对应于步骤205和步骤210。
为了检查传感器组件115,可以在步骤230中确定:基于在步骤205与步骤220之间通过线圈的电流变化,磁场125应如何变化。例如可以事先在结构相同的传感器组件115处凭经验确定磁场125的与电流变化相关的预期变化。在此,还可以考虑通量元件135的位置。结果可以以表格、曲线或特征图的形式存在。替代性地,也可以基于传感器组件115的物理模型通过分析来确定预期变化。在步骤235中确定所测得的磁场125是如何变化的。
在步骤240中确定这两种确定结果是否彼此相对应。尤其可以确定这两种确定结果是否彼此相差小于预先确定的量。观察可以包括在磁场传感器130处所确定的磁场125的强度和/或方向。还可以沿预先确定的空间方向检查强度。如果确定偏差大于这些变化之间的预先确定的偏差,则可以发出故障信号。
图3示出磁通量元件135的示例性实施方式。所展示的通量元件135分别被配置成用于绕轴线110(该轴线也已经参照图1进行了描述)进行旋转致动。
第一实施方式305示出磁场传感器130的区域中的轴向视图或横截面。通量元件135在此被设计成大体上径向对称的并且包括径向突出部,该径向突出部以圆扇形的方式径向向外延伸过预先确定的角度以及预先确定的距离。
第二实施方式310是以相似的视图展示的,其中在此通量元件135关于轴线110呈凸轮形状设计。替代性地,在这个视图中,通量元件135还可以具有偏心的圆盘的形状。
通量元件135的第三实施方式315是作为纵截面并且作为端侧的轴向视图展示的。通量元件135被定向成与在图1的图示中相同,因而下部区段位于线圈110的区域中并且中间区段或上部区段位于磁场传感器130的区域中。致动元件105被实施为具有径向凹槽的轴,该凹槽在轴向方向上延伸。这个凹槽中存在有通量元件135,该通量元件可以是大体上方形的,例如可以被设计为板、弹簧或半圆键。致动元件105具有高磁阻并且通量元件135具有低磁阻。
通量元件135的第四实施方式320是作为纵截面展示的。致动元件105在端侧邻接磁通量元件135,该磁通量元件在位于磁场传感器130的区域中的轴向位置处载有径向伸出部。伸出部优选在朝向线圈120的轴向侧上沿径向方向延伸;在相反的轴向侧上可以(如所展示地)径向向内地设计有倾斜的过渡部。在这个实施方式中,致动元件105也优选具有高磁阻并且通量元件135具有低磁阻。通量元件135可以在致动元件105致动时传递扭转力。这两个元件105、135可以材料配合地相互连接,例如其方式为将由塑料制成的致动元件粘合或注塑成型到通量元件135上。同样可以实现(尤其沿多边形的周长线的)形状配合的力传递。
通量元件135的第五实施方式325同样是作为纵截面展示的。轴向地朝向线圈110的方向延伸的区段是柱形地成形的并且与第四实施方式320类似地邻接具有突出部的区段。在突出部的轴向另一侧可以设置有通量元件135的径向凹口、收缩部或狭窄部位,其用于使材料中的磁通量经受增大的阻抗,以促进磁场125在突出部的方向上的径向扩展。在这个实施方式中,通量元件135可以被实施成与致动元件105单件式整合的。在狭窄部位处增大的磁阻在此可以标记这两个元件105、135之间的过渡部。在另一个变体中,两个单独的元件105、135还可以与在第四实施方式320中一样在轴向上相互连接。
图4示出传感器组件115上的各次测量的示例性的时间曲线图400。在水平方向上展示了时间t,并且在竖直方向上展示了受控通过线圈110的电流I。在图示中忽略了由于线圈110的电感引起的信号变形。
以优选规则的间隔Δt来确定通量元件135的位置,为此相应地控制正电流持续预先确定的时间地通过线圈110。任选以不同强度的电流来依次执行测量;在所展示的实施方式中,电流以两个阶交替式地被控制为预先确定的值的示例性的50%和100%。同样可以实现其他的值或多于两个的不同强度的电流。电流也可以改变其符号或者可以始终为负。
在测量之间可以执行对传感器组件115的检查,为此在本实施方式中使用电流的与用于进行位置确定相异的极性。优选在预先确定的电流强度为100%时进行检查,以获得尽可能明确的结果。进行位置确定或进行检查的持续时间主要取决于:可以多快地实现预先确定的磁场125以及磁场传感器130需要多长时间来进行确定。周期Δt可以根据期望的测量频率来选择并且在机动车辆处的常规应用中可以持续大约5ms至30ms。优选的是,在测量或检查之间进行暂停。在所展示的实施方式中,在周期Δt内,暂停总计是总测量持续时间的约三倍。
图5示出用于根据本发明实施方式的传感器组件115的线圈的实施方式的俯视图。线圈120被设计为电路板145上的印刷线圈。线圈120可以被用来进行动态位置获取。现在,由于线圈120被设计为电路板145上的结构,因此能够节省用于缠绕的线圈的成本。替代于此,在电路板145的制造过程中生产线圈120,而不会产生额外成本。
附图标记清单
100 输入设备
105 致动元件
110 轴线
115 传感器组件
120 电线圈
125 磁场
130 磁场传感器
135 磁通量元件
140 处理装置
200 方法
205 控制第一电流
210 确定第一磁场
215 确定位置,提供位置
220 控制第二电流
225 确定第二磁场
230 确定磁场的目标变化
235 确定磁场的实际变化
240 变化彼此相对应?
305 第一实施方式
310 第二实施方式
315 第三实施方式
320 第四实施方式
325 第五实施方式
400 流程
- 用于电流传感器的传感器组件,具有这样的传感器组件的电流传感器,用于这样的电流传感器的保持器,和组装电流传感器的方法
- 用于感测转向扭矩和绝对角度位置的传感器组件,以及具有所述传感器组件的传感器设备