一种机器人的控制界面校正方法及其医院临床辅助机器人
文献发布时间:2023-06-19 11:30:53
技术领域
本发明涉及一种机器人,具体是一种机器人的控制界面校正方法及其医院临床辅助机器人。
背景技术
部分特殊场所往往不建议人员逗留或频繁进出,如:重症监护室(ICU),隔离病房等,为了避免病人受到外界影响、以及尽量降低医护人员的感染风险,因此需要减少医护人员与病人的接触,但重症监护室、隔离病房等内部往往配备多种医疗器械以对病人进行生命体征检测和辅助急救等,而这些医疗器械又需要医护人员进行操作,这就一定程度上增加了医护人员与病人的接触。为此,有必要设计一种可触发医疗器械上的操控键的机器人。
发明内容
本发明的目的在于克服上述现有技术存在的不足,而提供一种机器人的控制界面校正方法及其医院临床辅助机器人,本发明能有效校正控制界面,以便于用户选择需要触发的操控键和机器人触发选择的操控键。
本发明的目的是这样实现的:
一种机器人的控制界面校正方法,包括以下步骤:
步骤①,机器人本体移动至作业位置并进入待机状态;
步骤②,机器人本体控制机械手进入搜索模式,以通过机械手上的深度相机搜索控制面板上的识别码;
步骤③,搜索到识别码后,机械手调整至与控制面板相同的倾斜角度,以垂直对准控制面板;
步骤④,深度相机捕获控制面板并裁图,以裁图中的操控区域生成相应的虚拟控制界面并通过控制终端上的控制端显示模块播报;
步骤⑤,用户通过控制端显示模块查看虚拟控制界面,以选择需要触发的操控键,并由机械手触发所选的操控键。
所述识别码以一块或两块以上的数量设置于控制面板上;
当所述识别码设置一块时,识别码呈环形设置,环形的识别码内侧区域为所述操控区域;
当所述识别码设置两块、三块或四块时,以识别码为边或角围成的区域为所述操控区域。
所述机器人本体通过扫描一块或两块以上组合的识别码,以调取与该识别码配套的医疗器械的基本信息;所述基本信息包括医疗器械的名称型号、医学用途、控制面板的样式和注意事项。
所述识别码通过粘贴、印刷、屏幕显示方式展示于控制面板上。
所述识别码为aruco代码。
步骤③中,所述机械手搜索到识别码并调整好倾斜角度后,机械手再次进入搜索模式,以搜索全部识别码确认全部识别码进入深度相机的视野范围内、及确认机械手置中并对准控制面板。
步骤④中,所述机器人本体对裁图进行处理,使裁图中的操控区域以接近正投影的形式在控制端显示模块上播报,以构成所述虚拟控制界面。
所述控制端显示模块具有触控功能,用户直接触摸控制端显示模块以选择需要触发的操控键;或者,用户通过光标方式选择需要触发的操控键。
所述机器人本体上设置有图文识别模块,机器人本体通过图文识别模块识别控制面板上展示的图案和/或文字。
一种医院临床辅助机器人,所述医院临床辅助机器人应用上述的控制界面校正方法。
本发明的有益效果如下:
机械手通过搜索控制面板上的识别码,并将识别码围出的操控区域裁图处理生成相应的虚拟控制界面,且在控制终端的控制端显示模块上播报,以便用户通过控制端显示模块选择需要触发的操控键,操控键的选择会转换成相应的指令并发送至机器人本体上,由机器人本体根据指令控制机械手触发所选择的操控键,进而实现对医疗器械的控制。具体有以下优点:
①用户通过医院临床辅助机器人即可远程控制重症监护室(ICU),隔离病房等中的医疗器械,避免病人受到外界影响,减少医护人员与病人的接触进而降低感染风险;
②机器人通过搜索识别码划分操控区域即可生成相应的虚拟控制界面,无需重新编写与控制面板匹配的程序,制造成本低,操作难度小,通用性强;
③识别码可通过多种方式设置于控制面板上,因此可应用于传统的医疗器械上,即无需专门生产相适应的医疗器械,有利于机器人的普及应用,用户无需熟悉新的医疗器械,操控简单。
附图说明
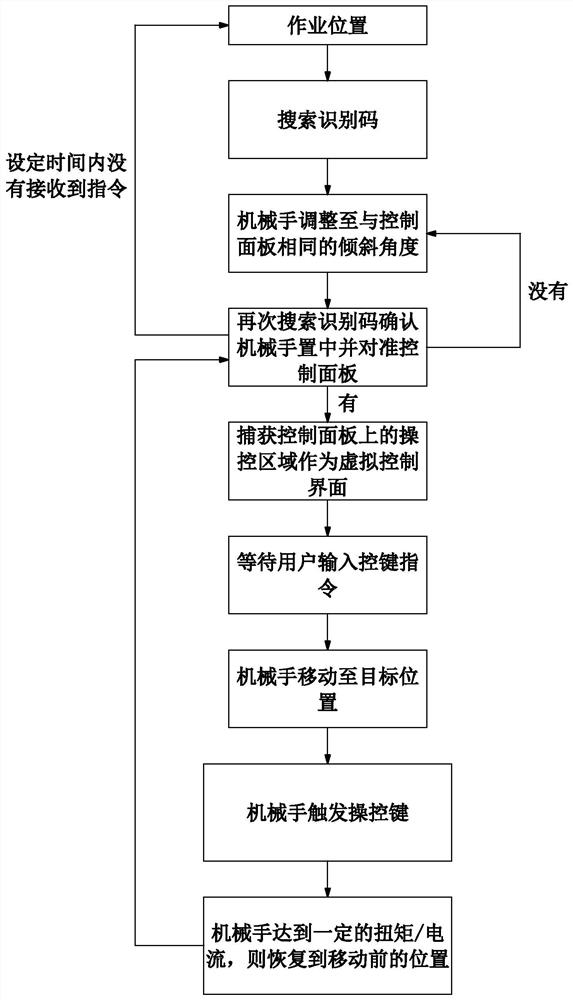
图1为本发明一实施例的校正流程图。
图2为本发明一实施例的控制原理图。
图3为本发明一实施例中机器人搜索识别码的示意图。
图4为本发明一实施例中深度相机捕获控制面板的示意图。
图5为本发明一实施例中机械手调整倾斜角度的示意图。
图6为本发明一实施例中机械手移动至与需要控制的操控键对应的侧视图。
图7为本发明一实施例中机械手触发操控键的示意图。
图8为本发明一实施例中操控区域生成虚拟控制界面的示意图。
图9为本发明一实施例中机器人在重症监护室活动的示意图。
图10-图13分别为本发明中识别码不同设置方案下虚拟控制界面的生成示意图。
具体实施方式
下面结合附图及实施例对本发明作进一步描述。
参见图1-图9,本机器人的控制界面校正方法,包括以下步骤:
步骤①,机器人本体1移动至作业位置K并进入待机状态,一般来说作业位置K设定为医疗器械Q附近(面前或侧部);
步骤②,机器人本体1控制机械手4进入搜索模式,以通过机械手4上的深度相机5搜索控制面板6上的识别码8,机械手4上还设置有用于触发操控键7的触发手指,该触发手指随深度相机5同步移动;
步骤③,搜索到识别码8后,机械手4调整至与控制面板6相同的倾斜角度,以垂直对准控制面板6;
步骤④,深度相机5捕获控制面板6并裁图,以裁图中的操控区域10生成相应的虚拟控制界面12并通过控制终端上的控制端显示模块11播报;
步骤⑤,用户通过控制端显示模块11查看虚拟控制界面12,以选择需要触发的操控键7,并由机械手4触发所选的操控键7。
进一步地,识别码8以一块或两块以上的数量设置于控制面板6表面;
当识别码8设置一块时,识别码8呈环形设置,环形的识别码8内侧区域为操控区域10;
当识别码8设置两块、三块或四块时,以识别码8为边或角围成的区域为操控区域10。
具体地,参见图8,本实施例涉及的识别码8设置两块,两块识别码8分别位于矩形区域的对角位置上,以限定围出矩形的操控区域10。
进一步地,机器人本体1通过扫描一块或两块以上组合的识别码8(即可扫描任意一块识别码8或两块以上识别码8组合),以调取与该识别码8配套的医疗器械Q的基本信息;基本信息包括医疗器械Q的名称型号、医学用途、控制面板6的样式和注意事项等,通过调取医疗器械Q相关的基本信息,用户可确认所需控制的医疗器械Q,且可通过机器人查看相关的注意事项等信息,有助于用户更好的控制医疗器械Q。
进一步地,识别码8通过粘贴、印刷、屏幕显示等方式展示于控制面板6表面。其中,粘贴方式可适用于传统(现有)的医疗器械Q上,大大提升了机器人的通用性,避免了生产相适应医疗器械Q而产生的高额成本,用户无需适应新的医疗器械Q,所以操作方便简单。
进一步地,识别码8为aruco代码,如二维码等,识别码8的形状结构可根据实际需要作相应的变化。
进一步地,步骤③中,机械手4搜索到识别码8并调整好倾斜角度后,机械手4再次进入搜索模式,以搜索全部识别码8确认全部识别码8进入深度相机5的视野范围内、及确认机械手4置中并对准控制面板6。
进一步地,步骤④中,机器人本体1对裁图进行处理,使裁图中的操控区域10以接近正投影的形式在控制端显示模块11上播报,以构成接近方正的虚拟控制界面12,便于用户选择需要触发的操控键,同时便于机器人本体1分析确认用户在虚拟控制界面12选择的操控键。
进一步地,操控键的选择方式至少有以下两种:①控制端显示模块11具有触控功能,用户直接触摸控制端显示模块11以选择需要触发的操控键7;②用户通过光标方式选择需要触发的操控键7,即控制端显示模块11中具有可移动的光标,光标的移动通过鼠标等控制。
进一步地,机器人本体1上设置有图文识别模块(图中未标示),机器人本体1通过图文识别模块识别控制面板6上展示的图案和/或文字;具体地,参见图8,当控制面板6带有用于播报相关数据和状态等信息的显示屏9时,可通过图文识别模块识别显示屏9上的图文信息,以便机器人实时监控医疗器械Q的工作情况,对于异常情况(如:病人状况出现异常,医疗器械Q出现异常等)可及时反馈;需要说明的是,图3-图7所展示的控制面板6与图8所展示的控制面板6样式不同,目的是为了展示多种样式的控制面板6,帮助说明适用的控制面板6不限于一种。
本实施例涉及的医院临床辅助机器人A应用了上述的控制界面校正方法。参见图3-5和9,本医院临床辅助机器人A中:机器人本体1通过机械臂3连接机械手4;机器人本体1底部设置有AGV小车2,AGV小车2根据预先设定的轨迹路线可将机器人本体1移动至作业位置K。
鉴于识别码8的设置可以是多样的,下面对设置有不同识别码8的控制面板6做进一步说明:
参见图10,本方案中的识别码8呈封闭的环形(也可以是开放的环形)设置,识别码8内侧构成操控区域10;
参见图11,本方案中的识别码8设置四块,且四块识别码8分别位于矩形操控区域10的四个角上;
参见图12,本方案中的识别码8设置两条,两条识别码8成对设置于左右侧或上下侧,两条识别码8之间构成操控区域10;
参见图13,本方案中的识别码8设置四条,四条识别码8两两成对设置,四条识别码8共同围成操控区域10。
上述为本发明的优选方案,显示和描述了本发明的基本原理、主要特征和本发明的优点。本领域的技术人员应该了解本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等同物界定。
- 一种机器人的控制界面校正方法及其医院临床辅助机器人
- 一种医院临床辅助机器人的控键方法