一种单输入双输出驱动装置
文献发布时间:2023-06-19 11:34:14
技术领域
本发明涉及传动装置技术领域,更具体的说是涉及一种单输入双输出驱动装置。
背景技术
火车车厢进行物料输送时,单次输送量大且成本低廉,但是在工作实践中,某些散装物料如煤炭、砂石料等装卸不仅劳动强度大且工效非常低。火车散装物料卸车设备如翻车机、链斗式卸车机、挖掘机、水平螺旋卸车机、垂直螺旋卸车机等均存在剩余物料清仓问题。
与翻车机比较,螺旋卸车机卸煤时车皮基本无损坏,对一般车型的适应性好。卸车线长度、受煤量与输出能力可根据不同需要灵活选择,可分段卸煤。螺旋卸车机按其整体形式的不同,螺旋卸车机可分为桥式、门式和单臂式三种;
在卸车机的驱动装置中往往需要对同轴线设置的两个转动部件进行驱动,而同轴设置的两个转动部件有时不仅需要不同的转速,还需要转向相反,在现有技术中的驱动设备往往体积庞大,结构复杂。
因此,如何提供一种结构简单的单输入双输出驱动装置是本领域技术人员亟需解决的问题。
发明内容
有鉴于此,本发明提供了一种单输入双输出驱动装置,以至少解决上述背景技术部分所提出的问题之一。
为了实现上述方案,本发明采用以下技术方案:
一种单输入双输出驱动装置,包括驱动件、壳体和安装在所述壳体内的第一行星减速器、第二行星减速器、第一锥形齿轮、第二锥形齿轮、第三锥形齿轮、安全联轴器、第一芯轴、第二芯轴和空心套轴;
其中所述驱动件的输出轴伸入所述壳体内与所述第一行星减速器的输入轴通过联轴器连接;所述第一锥形齿轮安装在第一锥形齿轮轴上,所述第一锥形齿轮轴通过联轴器与所述第一行星减速器的输出轴连接;所述第二锥形齿轮安装在第二锥形齿轮轴上,并且与所述第一锥形齿轮啮合;所述第三锥形齿轮安装在所述空心套轴上,并且与所述第二锥形齿轮啮合;
所述第一芯轴的一端连接在所述第一锥形齿轮的圆心处,另一端穿过所述第三锥形齿轮圆心处开设的通孔,伸入到所述空心套轴内,并通过所述安全联轴器与所述第二行星减速器的输入轴连接,所述第二芯轴与所述第二行星减速器的输出轴连接。
经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种单输入双输出驱动装置,通过驱动件提供动力,通过第一行星减速器、第二行星减速器进行速比调节;通过第一锥形齿轮、第二锥形齿轮、第三锥形齿轮配合完成换向,不仅能够实现第二芯轴和空心套轴不同的转速,还能够实现转向相反,并且设备体积较小,结构简单。
优选的,在上述一种单输入双输出驱动装置中,所述驱动件为驱动电机,所述驱动电机安装在所述壳体外一侧。
优选的,在上述一种单输入双输出驱动装置中,所述第一锥形齿轮轴通过轴承安装在所述壳体内。
优选的,在上述一种单输入双输出驱动装置中,所述第二锥形齿轮轴通过轴承安装在所述壳体内。
优选的,在上述一种单输入双输出驱动装置中,所述所述空心套轴通过轴承安装在所述壳体内。
优选的,在上述一种单输入双输出驱动装置中,所述第二行星减速器的减速器壳安装在所述空心套轴的内壁上。
优选的,在上述一种单输入双输出驱动装置中,所述空心套轴和所述第二芯轴均伸出至所述壳体外。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
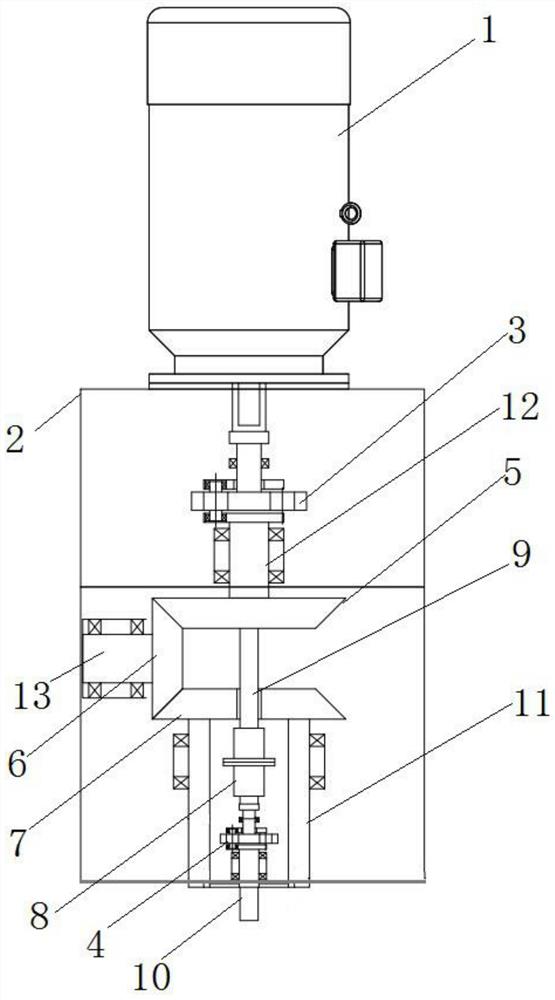
图1附图为本发明的结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明实施例公开了一种单输入双输出驱动装置,包括驱动件1、壳体2和安装在壳体2内的第一行星减速器3、第二行星减速器4、第一锥形齿轮5、第二锥形齿轮6、第三锥形齿轮7、安全联轴器8、第一芯轴9、第二芯轴10和空心套轴11;
其中驱动件1的输出轴伸入壳体2内与第一行星减速器3的输入轴通过联轴器连接;第一锥形齿轮5安装在第一锥形齿轮轴12上,第一锥形齿轮轴12通过联轴器与第一行星减速器3的输出轴连接;第二锥形齿轮6安装在第二锥形齿轮轴13上,并且与第一锥形齿轮5啮合;第三锥形齿轮7安装在空心套轴11上,并且与第二锥形齿轮6啮合;
第一芯轴9的一端连接在第一锥形齿轮5的圆心处,另一端穿过第三锥形齿轮7圆心处开设的通孔,伸入到空心套轴11内,并通过安全联轴器8与第二行星减速器4的输入轴连接,第二芯轴10与第二行星减速器4的输出轴连接。
为了进一步优化上述技术方案,驱动件1为驱动电机,驱动电机安装在壳体2外一侧。
为了进一步优化上述技术方案,第一锥形齿轮轴12通过轴承安装在壳体2内。
为了进一步优化上述技术方案,第二锥形齿轮轴13通过轴承安装在壳体2内。
为了进一步优化上述技术方案,空心套轴11通过轴承安装在壳体2内。
为了进一步优化上述技术方案,第二行星减速器4的减速器壳安装在空心套轴11的内壁上。
为了进一步优化上述技术方案,空心套轴11和第二芯轴10均伸出至壳体2外。
安全联轴器8也叫扭矩限制器,扭力限制器、安全离合器,是联接主动机与工作机机的一种部件,主要功能为过载保护,扭力限制器是当超载或机械故障而导致所需扭矩超过设定值时,它以打滑形式限制传动系统所传动的扭力,当过载情形消失后自行恢复联结。这样就防止了机械损坏,避免了昂贵的停机损失。
传动原理:
通过驱动件1提供动力,通过第一行星减速器3、第二行星减速器4进行速比调节;通过第一锥形齿轮5、第二锥形齿轮6、第三锥形齿轮7配合完成换向,不仅能够实现第二芯轴10和空心套轴11不同的转速,还能够实现转向相反,并且设备体积较小,结构简单。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
- 一种单输入双输出驱动装置
- 一种星球机器人单输入双输出驱动装置