一种具有变曲率自适应能力的爬壁机器人
文献发布时间:2023-06-19 11:40:48
技术领域
本发明属于移动机器人技术领域,涉及磁吸附爬壁机器人,尤其是一种具有变曲率自适应能力的爬壁机器人。
背景技术
磁吸附爬壁机器人是一种用来在恶劣、危险、极限情况下,在导磁壁面上进行特定作业如检查、监测、焊接、打磨等的一种自动化机械装置。目前磁吸附爬壁机器人已在核工业、石化工业、建筑工业、消防部门、造船业等铁磁性结构的生产施工中得到了广泛的应用。
在实际应用中,有些导磁壁面是空间曲面,其表面形貌凹凸不平,曲率半经较小,且曲率变化范围较大。对于在这类表面运行的磁吸附爬壁机器人,其吸附装置和导磁壁面之间的气隙会发生变化,磁吸附力的大小与气隙距离的平方成反比,微小的气隙距离变化会造成吸附力的较大的变化,将严重地影响爬壁机器人的负载能力。另外,由于导磁壁面的凹凸不平,也会对爬壁机器人的运动性能产生影响,如壁面的凹凸不平可能会使行走支撑轮悬空,导致驱动失效。因此,对于在复杂的变曲率导磁壁面上运行的爬壁机器人,在要求其具有强负载能力、良好的运动灵活性的同时,还要对变曲率导磁壁面具有较好的自适应能力。对于爬壁机器人来说,保证爬壁机器人在工作负载下,能稳定地在变曲率导磁壁面上吸附爬行,不会发生诸如下滑、坠落等吸附失效,是爬壁机器人的首要要求、也是最基本的要求。
对于在复杂的变曲率导磁壁面上工作的爬壁机器人,其核心是要始终保证磁吸附力的恒定,这是前提,其次要保证行走支撑轮始终与导磁壁面接触。只有恒定的磁吸附力才能使爬壁履带行走模块与导磁壁面接触,只有履带通过行走支撑轮始终与导磁壁面接触并产生足够的压力,才能实现爬壁履带行走模块的行走。现有的爬壁机器人很难同时满足上述要求,不能很好地适应变曲率导磁壁面作业。
发明内容
本发明的目的在于克服现有技术的不足,提供一种具有变曲率自适应能力的爬壁机器人,其对变曲率导磁壁面具有强负载能力和良好的运动灵活性。
本发明解决现有的技术问题是采取以下技术方案实现的:
一种具有变曲率自适应能力的爬壁机器人,包括机架、一对履带行走模块和电机模块,所述机架包括主体梁和一对连接关节,所述一对连接关节安装在主体梁两端,所述一对履带行走模块与一对连接关节的外侧,每个履带行走模块相对于主体梁有两个互为垂直的转动自由度,两个电机模块分别分别安装在履带行走模块上并为履带行走模块提供行走动力。
进一步,所述机架为轴状主体梁,所述轴状主体梁通过两端法兰与连接关节相连接,所述连接关节包括互为垂直的第一转轴和第二转轴,第二转轴绕第一转轴转动,所述履带行走模块连接在第二转轴的法兰上,且绕第二转轴转动。
进一步,所述主体梁与连接关节之间还安装有U型槽结构的万向轮主板,在U型槽两侧设有槽向长槽孔,在长槽孔上安装有万向轮。
进一步,所述履带行走模块包括主动轮、从动轮以及设置于主动轮、从动轮之间的一对摇摆支撑轮组件,所述主动轮、从动轮通过履带连接传动;在摇摆支撑轮组件上设置有与主动轮、从动轮轴线平行的摇摆轴,在摇摆轴上连接有永磁吸附板,在永磁吸附板的两端安装有一对与摇摆轴平行的行走支撑轮;所述永磁吸附板与一对行走支撑轮绕摇摆轴的轴线方向有一转动自由度。
进一步,所述履带行走模块还包括平行设置的内侧履带板和外侧履带板,所述主动轮、从动轮与一对摇摆支撑轮组件连接在内侧履带板与外侧履带板之间,所述内侧履带板连接在连接关节的第二转轴的法兰上。
进一步,所述内侧履带板与外侧履带板之间还连接有带轮加固板和把手,所述带轮加固板一端固定连接在电机模块的减速器法兰上,另一端固定在主动轮的轴承端盖上。
进一步,所述永磁吸附板包括导磁板和永磁铁,所述导磁板的材质为纯铁或低碳钢,所述永磁铁为长方体永磁铁,且沿高度方向磁化,相邻两块永磁铁沿高度方向以磁极相反的耦合排列方式安装在导磁板上。
进一步,所述主动轮、从动轮与行走支撑轮为同轴双轮结构,双轮安装所在轴的两端,所述主动轮、从动轮均为同步轮,所述履带为同步带,在履带内侧的中间部位设有沉槽,所述永磁吸附板上的永磁铁贴近沉槽。
进一步,所述主动轮、从动轮与行走支撑轮的内侧均设置有压带轮内挡板,所述压带轮内挡板位于履带沉槽内侧的槽边部。
进一步,所述电机模块包括电机、直角减速器和减速器法兰,所述减速器法兰与履带行走模块的内侧履带板连接,所述直角减速器的输出轴与履带行走模块的主动轮相连接。
本发明的优点和积极效果是:
1、本发明采用将一对履带行走模块通过连接关节对称安装在主体梁两侧,每个履带行走模块由自身电机独立驱动,具有运动灵活性高、工作环境适应性强等特点,能够自适应地在变曲率的导磁壁面上行走,且具有良好的负载能力,可广泛用于变曲率导磁壁面作业领域。
2、本发明的每个履带行走模块相对于机架设计了两个互为垂直的转动自由度,履带行走模块内又设计了一个转动自由度,通过上述三个转动自由度,使得爬壁机器人的永磁吸附板可以根据所行走的导磁壁面状况自动调节其自身的姿态,保证了每个永磁吸附板和导磁壁面之间的工作气隙变化在允许范围内,使得磁吸附力恒定,保证爬壁机器人不会因磁吸附力骤然变小而下滑、坠落。同时,恒定的磁吸附力也为履带行走模块的行走提供了必要的摩擦力,避免了履带行走模块因摩擦力不足而造成的履带打滑,不能行走情况的发生。
3、本发明在复杂的变曲率导磁壁面(如水轮机叶片表面)上具有良好的自适应性能,且具有良好的负载能力和运动灵活性。
附图说明
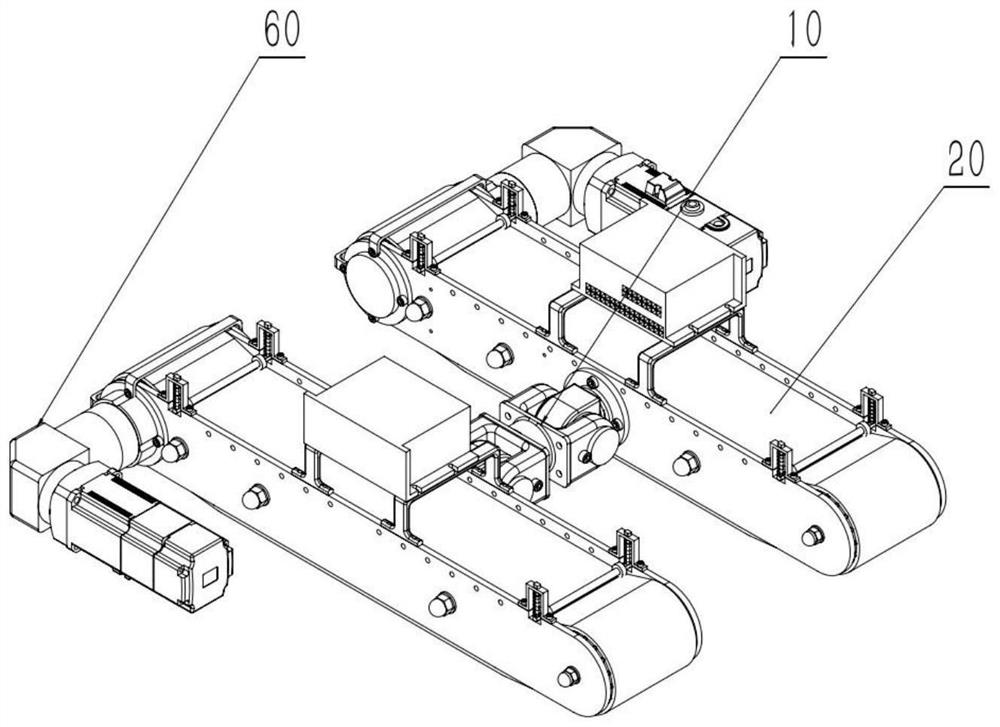
图1为本发明的整体结构示意图;
图2为本发明的机架结构示意图;
图3为本发明的连接关节结构示意图;
图4为图3的A-A向剖视图;
图5为图3的B-B向剖视图;
图6为本发明沿圆弧曲面轴向行走时的结构示意图;
图7为本发明沿圆弧曲面周向行走时的结构示意图;
图8为本发明的履带行走模块结构示意图;
图9为本发明的履带结构示意图;
图10为本发明的摇摆支撑轮组件结构示意图;
图11为本发明的电机模块结构示意图;
图12为本发明的永磁模块结构示意图;
图13为本发明沿曲面转向时的结构示意图;
图中:10-机架;101-主体梁;102-连接关节;1021-第一轴基座;1022-第一转轴;1023-第二转轴;1024-第一轴自润滑翻边轴套;1025-第二轴自润滑轴套;1026-轴承轮毂;1027-圆锥滚子轴承;1028-平垫圈;1029-销钉;103-万向轮主板;104-万向轮;20-履带行走模块;202-主动轮;203-从动轮;30-摇摆支撑轮组件;301-摇摆轴;302-永磁吸附板;3021-导磁板;3022-永磁铁;303-行走支撑轮;304-压带轮内挡板;401-履带;402-内侧履带板;403-外侧履带板;404-控制器支架;50-带轮加固板;60-电机模块;601-电机;602-直角减速机;603-减速机法兰。
具体实施方式
以下结合附图对本发明实施例做进一步详述。
一种具有变曲率自适应能力的爬壁机器人,如图1所示,包括机架10和一对履带行走模块20,所述一对履带行走模块20通过连接关节102安装在机架10两侧,机架10起支撑连接履带行走模块20的作用。
如图2至图5所示,机架10包括主体梁101和一对连接关节102,所述主体梁101为轴结构,轴两端法兰上对称连接有一对连接关节102,所述连接关节102包括互为垂直的第一转轴1022和第二转轴1023,第二转轴1023绕第一转轴1022转动。所述履带行走模块20连接在第二转轴1023的法兰上,且绕第二转轴1023转动。所述履带行走模块20通过连接关节102与机架10连接,使每个履带行走模块20相对于机架10有两个互为垂直的转动自由度。
本实施例中,连接关节102中的第二转轴1023和第一轴基座1021通过第一转轴1022连接,第一转轴1022的末端由销钉1029固定;第一转轴1022和第一轴基座1021孔之间设置有第一轴自润滑翻边轴套1024,第二转轴1023孔与第一转轴1022之间设置有第二轴自润滑轴套1025,第二转轴1023可绕着第一转轴1022实现自由旋转。该部分结构可以使两侧履带行走模块20以行走方向为转动轴线,向内或向外摆动,实现一个维度的转动自由度,可以适应圆弧曲面的轴向行走,如图6所示。
第二转轴1023的圆柱端与一对圆锥滚子轴承1027内圈相配合连接,圆锥滚子轴承1027外圈与轴承轮毂1026配合连接,轴承轮毂1026通过螺栓固定在内侧履带板402上。内侧的圆锥滚子轴承1027内圈与第二转轴1023的轴肩接触,外圈与轴承轮毂1026轴肩的一侧接触;外侧的圆锥滚子轴承1027外圈与轴承轮毂1026轴肩的另一侧接触,内圈通过平垫圈1028和螺母固定。该部分结构可以实现履带行走模块20绕第二转轴1023自由旋转,此时,两侧履带行走模块20可以实现空间交叉旋转,因此实现二个维度的转动自由度,如图7所示,可以适应圆弧曲面的周向行走,也可以在更为复杂的变曲率面上行走,但在复杂的变曲率面上行走时,永磁吸附板302与行走支撑轮303如果没有第三个转动自由度,永磁吸附板302与变曲率导磁壁面的磁吸附将为局部吸附,吸附力也将大为降低,无法可靠地吸附在变曲率导磁壁面上,也不能实现可靠行走。
如图8至图10所示,所述履带行走模块20包括主动轮202、从动轮203以及设置于主动轮202、从动轮203之间的一对摇摆支撑轮组件30。在摇摆支撑轮组件30上设置有与主动轮202、从动轮203轴线平行的摇摆轴301,在摇摆轴301上连接有永磁吸附板302,在永磁吸附板302的两端安装有一对与摇摆轴301平行的行走支撑轮303;所述永磁吸附板302与一对行走支撑轮303绕摇摆轴301的轴线方向有一转动自由度。主动轮202、从动轮203与一对摇摆支撑轮组件30通过履带401连接传动。所述履带行走模块20还包括平行设置的内侧履带板402和外侧履带板403,所述主动轮202、从动轮203与一对摇摆支撑轮组件30连接在内侧履带板402与外侧履带板403之间,内侧履带板402连接在第二转轴1023的法兰上。
本实施例中,摇摆轴301设置在永磁吸附板302的中间部位,永磁吸附板302两端的行走支撑轮303相对于摇摆轴301的轴线等臂摇摆。摇摆轴301不一定非要设置在永磁吸附板302的中间部位,设置在其中的一个行走支撑轮303上,或其他位置都可以,只要满足其中一个行走支撑轮303相对于另一个行走支撑轮303摆动,使得两个行走支撑轮303在复杂曲面上始终能同时接触导磁壁面即可。
由于两个行走支撑轮303在复杂曲面上始终能同时接触导磁壁面,那么,处于两个行走支撑轮303之间的永磁吸附板302始终与两个行走支撑轮303在导磁壁面上的接触点等距,这样就可以保证永磁吸附板302与相对应的导磁壁面间的距离保持基本不变。如果没有这一个转动自由度,两个行走支撑轮303与内侧履带板205、外侧履带板206固定连接,无法保证两个行走支撑轮303始终能同时接触曲面。这样会造成永磁吸附板302与相对应的导磁壁面间的气隙距离在一侧正常,在另一侧气隙距离过大的情况,致使磁吸附力急剧减小,爬壁机器人会因此而下滑、坠落。
摇摆支撑轮组件30的磁吸附力能保证基本恒定,磁吸附力通过两个行走支撑轮303对履带401、导磁壁面的压力也基本恒定。爬壁履带行走模块设置了一对摇摆支撑轮组件30,两个摇摆支撑轮组件30上的四个行走支撑轮303都始终与履带401、导磁壁面接触,并对履带401、导磁壁面产生恒定压力,这种恒定压力为爬壁履带行走模块的行走提供了必要的摩擦力,避免了因摩擦力不足而造成的履带401打滑,不能行走的情况发生。
由于履带401在使用中会出现两个问题,一是因履带401过度拉长而脱离带轮,造成掉带;另一个问题是行走的导磁壁曲面曲率过大,履带401没有足够的长度余量使两个摇摆支撑轮组件30上的永磁吸附板302紧贴导磁壁曲面,造成磁吸力不足,严重者造成爬壁机器人坠落。为了解决上述问题,如图8所示,两个摇摆支撑轮组件30上的摇摆轴301与内侧履带板402、外侧履带板403的连接是可调的,内侧履带板402、外侧履带板403与摇摆轴301相连接的孔为高度方向上的长槽孔,两个摇摆支撑轮组件30可在高度方向上下调整。当履带401过度拉长时,向下调整两个摇摆支撑轮组件30上的摇摆轴301,涨紧履带401,避免履带脱落;当行走的导磁壁曲面曲率过大,而履带401没有足够的长度余量时,向上调整两个摇摆支撑轮组件30上的摇摆轴301,放松履带401,使永磁吸附板302紧贴导磁壁曲面,避免爬壁机器人坠落。
所述主动轮202连接有电机模块60,如图11所示,所述电机模块60包括电机601、直角减速器602和减速器法兰603,电机601设置在机架10内侧,电机601输出端连接直角减速器602,直角减速器602通过减速机法兰603固定在内侧履带板205上,直角减速器602的输出轴与主动轮202连接,为履带行走模块20提供行走动力。
如图12所示,为了提高磁吸附强度,所述永磁吸附板302包括导磁板3021和永磁铁3022,所述导磁板3021的材质为纯铁或低碳钢,所述永磁铁3022为长方体永磁铁,且沿高度方向磁化,相邻两块永磁铁3022沿高度方向以磁极相反的耦合排列方式连接在导磁板3021上。具体的,由前侧磁铁的N级经过导磁板3021到达后侧永磁铁的S级,再经后侧永磁铁的N级通过壁面到达前侧永磁铁的S级构成回路,从而保证机构吸附于导磁壁面上。
永磁吸附板302与行走支撑轮303绕摇摆轴301的轴线自由转动,实现了永磁吸附板302与行走支撑轮303第三个维度的转动自由度,第三个维度的转动自由度,使永磁吸附板302与变曲率面的磁吸附为整体吸附,吸附力也大为提高,使得履带行走模块20在变曲率导磁壁面上行走时,永磁吸附板302始终能吸附在变曲率导磁壁面上。
如图13所示,以上所述三个转动自由度,使得爬壁机器人的永磁吸附板302可以根据所行走的导磁壁面状况自动调节其自身的姿态,保证了每个永磁吸附板302和导磁壁面之间的工作气隙变化在允许范围内,同时也保证了爬壁机器人的可靠驱动和运动灵活性。
为了防止履带401掉带,所述主动轮202、从动轮203与行走支撑轮303为同轴双轮结构,双轮在所在轴的两端。所述同轴双轮为同步轮,所述履带401为同步带,履带401不与双轮啮合的中间部位设有沉槽,所述永磁吸附板302上的永磁铁3022贴近沉槽。所述主动轮202、从动轮203与行走支撑轮303,在其双轮内侧均设置有压带轮内挡板304,所述压带轮内挡板304位于履带401沉槽的内侧槽边部。这样,可有效保证履带401不脱出带轮。
为了增加爬壁机器人行走的稳定性,在所述主体梁101与连接关节102之间安装有万向轮主板103,万向轮主板103为U型槽状,在槽两侧设有槽向长槽孔,在长槽孔上安装有万向轮104,可以通过长槽孔调节万向轮104的高度。万向轮104在某些情况下可与导磁壁面接触滚动,以保证爬壁机器人行走的稳定性。
为了保证履带行走模块20前端的稳固性,在所述内侧履带板402与外侧履带板403之间连接有带轮加固板50和控制器支架404。所述带轮加固板50一端固定连接在减速器法兰603上,另一端固定连接在主动轮202的轴承端盖上。带轮加固板50用来连接内侧履带板205和外侧履带板206,通过螺栓连接,起到夹紧作用,主动带轮加固板50在履带模块40的前端安装有2处,保证履带行走模块20前端的稳固性。
本实施例中,本发明可以通过控制电机601的速度差,实现爬壁机器人的转弯、所述的前进、后退、转弯功能,电机601通过电器盒中的电机驱动器(图中未标出)控制。由于可以控制左右两侧电机601以相反方向转动,因此可实现本发明的原地转弯。
本发明未述及之处适用于现有技术。
需要强调的是,本发明所述的实施例是说明性的,而不是限定性的,因此本发明包括并不限于具体实施方式中所述的实施例,凡是由本领域技术人员根据本发明的技术方案得出的其他实施方式,同样属于本发明保护的范围。
- 一种具有变曲率自适应能力的爬壁机器人
- 一种具有变曲率自适应能力的爬壁机器人