一种可调节刚性起重装置及其工作方法
文献发布时间:2023-06-19 11:44:10
技术领域
本发明属于起重设备领域,具体涉及一种可调节刚性起重装置及其工作方法。
背景技术
起重机是一种专门用来对物料进行运输、装卸和起重作业的设备,它在现代经济建设中有着广泛的应用,是现代化生产中不可或缺的重要一类。它能有效地减少事故的发生概率,能减轻工人劳动强度、降低企业产品成本,同时可以有效地提高工业设备、原料的运输效率,最终有效地保证安全生产和提高工作效率,目前的起重机一般利用连杆机构实现转向和位置移动,设置司机房进行控制,或利用钢丝绳等进行起吊,物料运输中自由度高,自动化不足,且绳索引起重物摆动,进而引起震动,严重时造成货物损坏,甚至引发安全事故。
本发明的目的在于提供一种可调节刚性起重装置及其工作方法,以解决上述背景技术中提出的问题。
发明内容
发明目的:为了克服以上不足,本发明的目的是提供一种可调节刚性起重装置,结构简单,利用梁的可控距离的伸缩实现货物的直线移动,梁的刚性强度高,支承能力强,并可实现全自动控制。
为了实现上述目的,本发明提供了一种可调节刚性起重装置,包括天轨、伸缩梁、第一气缸、转盘、夹持装置、第二气缸和控制器,所述第一气缸和第二气缸分别固定连接于伸缩梁的两端,所述第一气缸另一端通过转轴连接转盘,所述转盘固定连接夹持装置,所述第二气缸另一端固定于控制器上端,所述伸缩梁通过电磁感应活动连接于天轨,所述伸缩梁由若干第一关节和第二关节间歇排列连接组成,所述第一关节套装于第二关节外部,所述第一关节可沿天轨直线运动以完成伸缩,利用伸缩梁的直线伸缩完成货物的移载,利用第一气缸的升降实现货物的升降,利用第二气缸使伸缩梁连接于天轨。
进一步的,上述的可调节刚性起重装置,所述天轨两侧设有两组向下延伸的安装台,所述伸缩梁位于两组安装台之间,所述两组安装台的内外两侧各设有一组同步链条,对应的,所述第一关节下方两侧设有固定链条,利用同步链条带动固定链条直线移动,从而使第一关节移动,进行伸缩,所述固定链条之间的距离可调,当距离小时,固定链条与同步链条不接触,同步链条移动时该第一关节不移动。
进一步的,上述的可调节刚性起重装置,所述固定链条固定于双向运动电缸的两侧,所述双向运动电缸固定安装于第一关节底部,所述双向运动电缸通过伺服电机控制,实现固定链条之间距离的控制。
进一步的,上述的可调节刚性起重装置,所述天轨一端顶部设有伺服电机,所述伺服电机通过主动链轮带动两个从动链轮,所述从动链轮分别驱动两组同步链条,实现两组同步链条的同向运动。
进一步的,上述的可调节刚性起重装置,所述从动链轮通过轴承和轴安装于天轨。
进一步的,上述的可调节刚性起重装置,所述第一关节呈“工”字型,底部两侧设有向上的第一凸起,所述第二关节呈“一”字形,两侧向下设有第二凸起,所述第二关节套装于相邻的两第一关节之间,第二关节套装于第一关节内的距离决定梁的伸长或缩短,第一凸起和第二凸起有限位作用。
进一步的,上述的可调节刚性起重装置,所述控制器底部设有自锁车轮,利于整个装置的移动。
进一步的,上述的可调节刚性起重装置,所述夹持装置为夹爪或挂钩,所述伸缩梁为复合钢结构。
上述的可调节刚性起重装置的工作方法,包括以下步骤:
1)利用控制器将起重装置移动到要工作的天轨位置,启动第二气缸使伸缩梁通过电磁感应吸附于天轨;
2)根据起重距离计算固定链条与同步链条的接触数量,启动相同数量双向运动电缸,使固定数量的第一关节可进行直线运动;
3)启动伺服电机,使夹持装置到设定位置,并在第一气缸作用下升降以夹持起重物,之后伺服电机反向运转,伸缩梁运动到重物放置位置,放下重物。
与现有技术相比,本发明的有益效果是:
1.本发明的可调节刚性起重装置,通过第一关节的移动改变第二关节套装于第一关节的长度,从而实现伸缩梁的直线伸缩运动,保证了起重装置的刚性,且伸缩运动由若干第一关节的运动形成的累加运动,伸缩速度快,效率高。
2.本发明的可调节刚性起重装置,通过在天轨上设置同步链轮带动第一关节的移动,并通过调节固定链条之间的距离,使确定数量的第一关节移动,实现了伸缩长度的可控。
附图说明
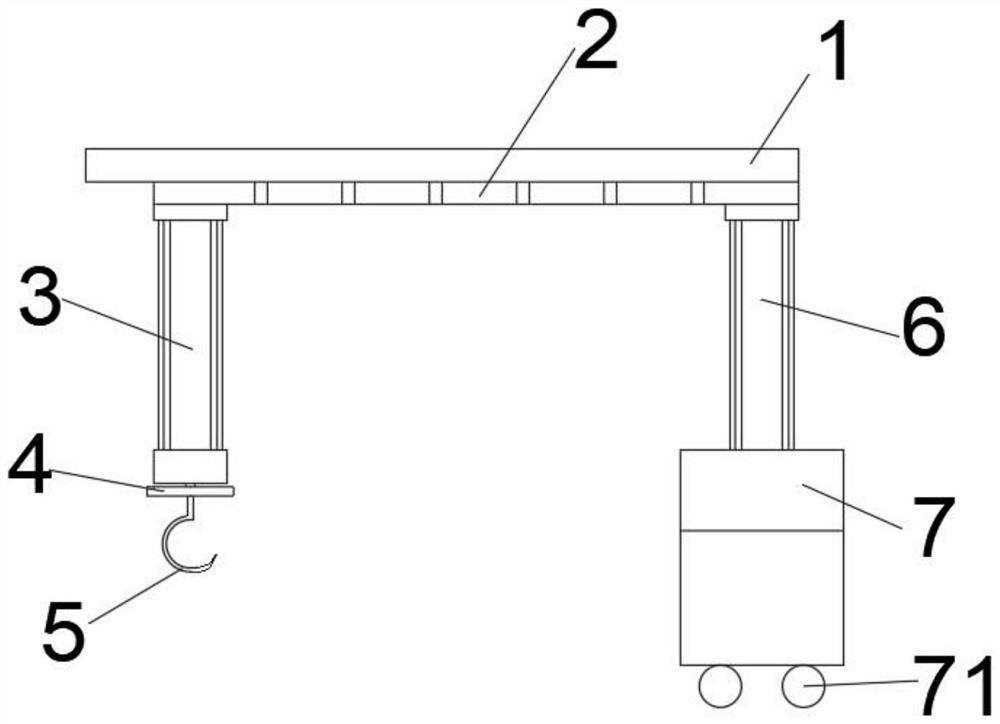
图1为本发明的结构示意图;
图2为本发明中同步链条与固定链条的安装结构示意图;
图3为本发明中同步链条的运动原理示意图;
图4为本发明中第一关节与第二关节的连接示意图。
具体实施方式
下面结合附图和具体实施例,进一步阐明本发明。
结合图1和图4示的可调节刚性起重装置,包括天轨1、伸缩梁2、第一气缸3、转盘4、夹持装置5、第二气缸6和控制器7,所述第一气缸3和第二气缸6分别固定连接于伸缩梁2的两端,所述第一气缸3另一端通过转轴连接转盘4,所述转盘4固定连接夹持装置5,所述第二气缸6另一端固定于控制器7上端,所述伸缩梁2通过电磁感应活动连接于天轨1,所述伸缩梁2由若干第一关节211和第二关节212间歇排列连接组成,所述第一关节211套装于第二关节212外部,所述第一关节可沿天轨1直线运动以完成伸缩。
进一步的,如图2所示,所述天轨1两侧设有两组向下延伸的安装台,所述伸缩梁2位于两组安装台之间,所述两组安装台的内外两侧各设有一组同步链条12,对应的,所述第一关节211下方两侧设有固定链条23,所述固定链条23之间的距离可调。
进一步的,如图2所示,所述固定链条23固定于双向运动电缸22的两侧,所述双向运动电缸22固定安装于第一关节211底部,所述双向运动电缸22通过伺服电机控制。
进一步的,如图3所示,所述天轨1一端顶部设有伺服电机14,所述伺服电机14通过主动链轮带动两个从动链轮13,所述从动链轮13分别驱动两组同步链条12。
进一步的,所述从动链轮13通过轴承和轴安装于天轨1。
进一步的,如图4所示,所述第一关节211呈“工”字型,底部两侧设有向上的第一凸起201,所述第二关节212呈“一”字形,两侧向下设有第二凸起212,所述第二关节212套装于相邻的两第一关节211之间。
进一步的,如图1所示,所述控制器7底部设有自锁车轮71。
进一步的,所述夹持装置5为夹爪或挂钩,所述伸缩梁2为复合钢结构。
上述的可调节刚性起重装置的工作方法,包括以下步骤:
1)利用控制器7将起重装置移动到要工作的天轨1位置,启动第二气缸12使伸缩梁2通过电磁感应吸附于天轨1;
2)根据起重距离计算固定链条23与同步链条12的接触数量,启动相同数量双向运动电缸22,使固定数量的第一关节211可进行直线运动;
3)启动伺服电机14,使夹持装置5到设定位置,并在第一气缸3作用下升降以夹持起重物,之后伺服电机14反向运转,伸缩梁2运动到重物放置位置,放下重物。
上述具体实施方式不能作为对本发明保护范围的限制,对于本领域技术人员而言,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内,本说明书未作详细描述的内容属于本领域专业技术人员公知的现有技术。
- 一种可调节刚性起重装置及其工作方法
- 一种用于桥式起重机的刚性定位起重装置