一种线阵探测器扫描激光雷达
文献发布时间:2023-06-19 11:45:49
技术领域
本发明是关于一种线阵探测器扫描激光雷达,涉及激光雷达技术领域。
背景技术
三维环境测量和感知具有重要的民用和军用价值。在ADAS辅助驾驶和自动驾驶系统中,对车辆周边环境进行空间距离测量和三维环境重建,是实现高精度自动驾驶控制的前提条件。毫米波雷达和摄像头三维视觉重建是比较常见的距离测量技术,但是在自动驾驶应用场景下,毫米波雷达的横向分辨率难以达到要求,且易受金属物体干扰;摄像头三维视觉重建的测距精度较低,对于远距离的目标,也较难实现精准的距离测量。激光雷达通过主动发射脉冲式红外激光束,照射到被测物体后,形成漫反射回波,由接收系统收集;通过测量发射脉冲和接收回波之间的时间差,可以获得被测物体的距离信息。激光雷达具有测距精度高、横向分辨率高的优点,在辅助驾驶和自动驾驶领域有广阔的应用前景。
激光雷达包括光源、探测器、光学发射、光学接收和扫描系统。通过对测距方式、收发系统和扫描系统的排列组合,形成几种技术方案,例如:机械旋转式,其特点为一个点光源对应一个探测器,采用多对收发系统进行逐一的收发光路对准,同时采用整体旋转的方式进行扫描;使用阵列点光源和阵列探测器,使其一一对应,同样采用整体旋转的方式进行扫描,是机械旋转式的一种变形;MEMS方案的特点为使用单个或多个点光源,使用线阵或面阵探测器,利用MEMS的二维摆扫,实现空间点云的输出。如图1所示的专利CN208506242U公开的激光雷达系统,包括发射激光器1、光束整形镜2,反射镜3、接收透镜4、线阵APD5及探测物6。使用线阵探测器作为接收器件,激光发射系统产生线状激光光斑与接收视场匹配,可以快速获得多个距离测量点,提高系统的测量速度和适用范围。此外,由于使用单个光束与阵列探测器件进行匹配,系统的装调难度大大减小,有利于控制激光雷达产品的整体成本。目前常见的线阵探测器阵列通常有4组、8组或16组测量单元,单次测量可以进行4点、8点或16点的采样。线性探测器阵列在垂直阵列方向宽度通常要大于线状激光光斑的宽度,如图2所示。现有技术中的主流线性阵列探测器例如FirstSensor和滨松的阵列探测器,其垂直于阵列方向尺寸在1-2mm,而线激光经过接收系统会聚后的宽度通常在200-300um。
综上所述,现有技术方案存在以下问题:其一,线性探测器探测线激光,但是线性探测器较宽,激光窄,探测器性能利用不完全,一束线激光覆盖探测器范围广,每个单元能量不足,造成探测距离近,若使用多个激光器竖直排列,又急剧增加雷达系统高度;其二,未使用的线性探测器阵列的感光面积会增加环境噪声,影响探测信号的信噪比;其三,若扩宽线状激光光斑宽度来匹配线性探测器阵列宽度,则系统横向分辨率会降低很多,严重影响系统性能。
发明内容
针对上述问题,本发明的目的是提供一种能够组合使用多个激光器提高探测距离和横向分辨率的线阵探测器扫描激光雷达。
为实现上述目的,本发明采取以下技术方案:一种线阵探测器扫描激光雷达,该雷达包括:
激光发射系统,包括多个发射激光器,所述发射激光器采用边缘发射激光器,多个所述边缘发射激光器被配置为发射线激光照射被测物体形成漫反射回波;
激光接收系统,包括一个线阵探测器,所述线阵探测器被配置为采集被测物体表面产生的漫反射回波;
控制系统,被配置为控制各所述发射激光器和线阵探测器工作;
其中,所述多个发射激光器用于匹配所述线阵探测器在与阵列方向垂直的区域。
上述线阵探测器扫描激光雷达,进一步地,所述激光接收系统还包括接收镜,所述线阵探测器和被测物体具有相对于所述接收镜的物像关系。
上述线阵探测器扫描激光雷达,进一步地,所述多个发射激光器采用竖直方向顺序排列,水平方向交叠顺序排列方式。
上述线阵探测器扫描激光雷达,进一步地,所述多个发射激光器采用竖直方向顺序排列,水平方向交叠周期排列方式,排列周期为m,m≥2。
上述线阵探测器扫描激光雷达,进一步地,所述线阵探测器未利用到的区域粘贴不透光的黑色狭缝。
上述线阵探测器扫描激光雷达,进一步地,所述边缘发射激光器经光束整形形成线激光,其中,对所述边缘发射激光器的快轴方向使用平凸柱透镜进行准直,对边缘发射激光器的慢轴方向按照需求设计平凸透镜进行发散角处理形成线激光。
上述线阵探测器扫描激光雷达,进一步地,各发射激光器和线阵探测器采用分时控制,避免脉冲信号的串扰。
上述线阵探测器扫描激光雷达,进一步地,各发射激光器和线阵探测器采用分时控制的过程包括:第一个发射激光器发出一个脉冲信号S
本发明由于采取以上技术方案,其具有以下优点:
1、本发明可以在线阵探测器扫描激光雷达系统内组合多个经光束整形的边缘激光发射器器件,匹配线阵探测器横向不同区域的感光面,增加探测器单元接收到的功率,提升激光雷达探测距离;
2、本发明在不扩宽线激光宽度的情况下,使用多个激光器组合,充分利用线阵探测器器件性能,提高激光雷达的横向分辨率;
3、本发明在未使用的线阵探测器表面粘贴遮光狭缝,降低环境噪声的影响,提高探测信号的信噪比;
4、本发明的激光器和线阵探测器采用分时工作的方式进行配合,不影响点云的行列结构与显示效果,同时有效地避免不同激光器之间的信号干扰;
综上,本发明可以广泛应用于激光雷达探测中。
附图说明
通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本发明的限制。在整个附图中,用相同的附图标记表示相同的部件。在附图中:
图1为现有技术的激光雷达系统结构示意图;
图2为现有线激光和线性探测器结构示意图;
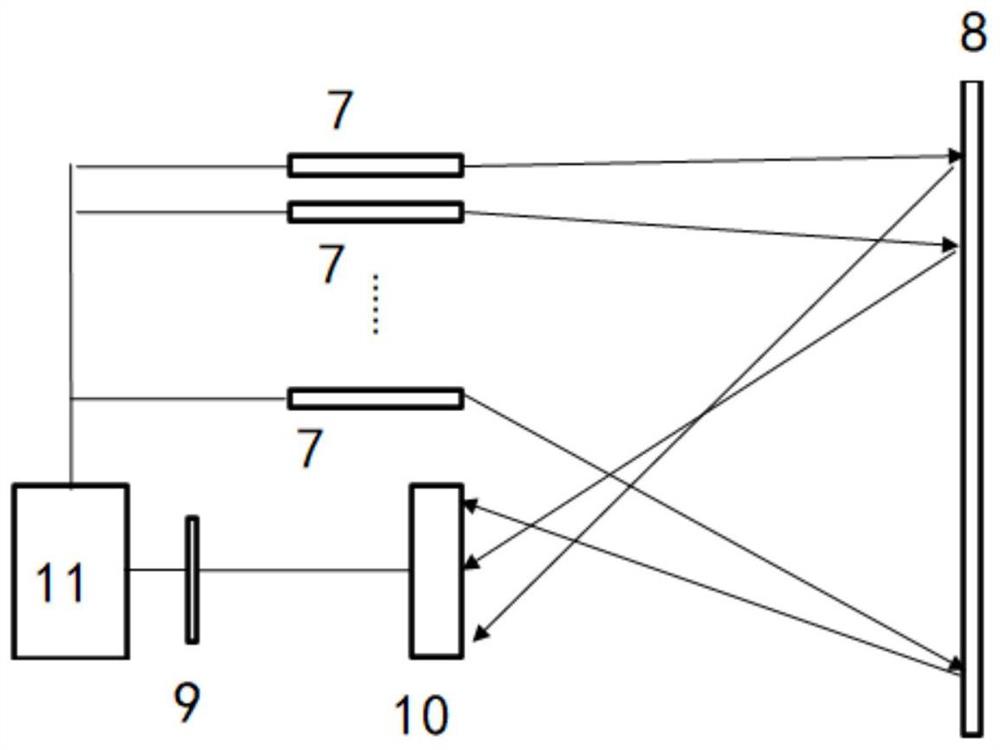
图3为本发明实施例的系统原理图;
图4为本发明实施例边缘发射激光器发光面示意图;
图5为本发明实施例的线激光一列排布示意图;
图6为本发明实施例线激光水平间隔排列示意图;
图7为本发明实施例线激光对应方式一;
图8为本发明实施例匹配图7的狭缝;
图9为本发明实施例激光器能量随角度分布示意图;
图10为本发明实施例线激光对应方式二;
图11为本发明实施例匹配图10的狭缝;
图12为本发明实施例激光器复用的激光雷达工作时序图。
具体实施方式
下面将参照附图更详细地描述本发明的示例性实施方式。虽然附图中显示了本发明的示例性实施方式,然而应当理解,可以以各种形式实现本发明而不应被这里阐述的实施方式所限制。相反,提供这些实施方式是为了能够更透彻地理解本发明,并且能够将本发明的范围完整的传达给本领域的技术人员。
应理解的是,文中使用的术语仅出于描述特定示例实施方式的目的,而无意于进行限制。除非上下文另外明确地指出,否则如文中使用的单数形式“一”、“一个”以及“所述”也可以表示包括复数形式。术语“包括”、“包含”、“含有”以及“具有”是包含性的,并且因此指明所陈述的特征、步骤、操作、元件和/或部件的存在,但并不排除存在或者添加一个或多个其它特征、步骤、操作、元件、部件、和/或它们的组合。文中描述的方法步骤、过程、以及操作不解释为必须要求它们以所描述或说明的特定顺序执行,除非明确指出执行顺序。还应当理解,可以使用另外或者替代的步骤。
为了便于描述,可以在文中使用空间相对关系术语来描述如图中示出的一个元件或者特征相对于另一元件或者特征的关系,这些相对关系术语例如为“内部”、“外部”、“内侧”、“外侧”、“下面”、“上面”等。这种空间相对关系术语意于包括除图中描绘的方位之外的在使用或者操作中装置的不同方位。
如图3所示,本发明实施例提供的激光器组合的线阵探测器扫描激光雷达,包括:
激光发射系统,包括多个发射激光器7,多个发射激光器7产生脉冲激光束照射被测物体8形成漫反射回波,其中,多个发射激光器7用于匹配同一个线阵探测器9在与阵列方向垂直的区域。
激光接收系统,用于采集被测物体8表面产生的漫反射回波。激光接收系统包括线阵探测器9和接收镜10,其中,线阵探测器9和被测物体8具有相对于接收镜10的物像关系,即被测物体8表面的漫反射回波经由接收镜10成像在线阵探测器9表面,线阵探测器9相对于接收镜10的共轭像为激光雷达的探测视场。
控制系统11,用于控制各发射激光器7和线阵探测器9的工作。
本实施例的一些实现中,如图4所示,本实施例的各发射激光器7可以采用边缘发射激光器(EEL),边缘发射激光器本身发光特性,即快慢轴发散角不一样,快轴发散角大于慢轴发散角,且快轴发光长度小于慢轴发光长度。对慢轴和快轴方向的发散光线进行准直时,快轴更容易准直地更好,而慢轴准直则相对困难很多。优选地,利用半导体激光器器件的特性,对容易准直的快轴方向使用平凸柱透镜进行准直;对不容易准直的慢轴方向按照需求设计平凸透镜进行简单的发散角扩大或减小处理形成线激光,即对多个边缘发射激光器均经光束整形,形成线激光。
本实施例的一些实现中,由于激光器器件有一定的封装大小,如图6所示,本实施例的多个发射激光器7采用在水平方向有间隔且交叠的排列,若多个发射激光器7一列纵向排布,激光雷达高度会急剧增高,且相邻两个线激光间有未利用的探测器区域,如图5所示。
本实施例的一些实现中,在线阵探测器9处,多个发射激光器7对应线阵探测器不同位置分布如图7所示。一个发射激光器7对应k个探测器通道(k≥2);n个发射激光器7水平竖直方向顺序排列,提高水平分辨率,增加单次探测点数量。发射激光器自身能力分布特性如图9所示的能量随角度分布,边缘角度能量较弱,为了进一步高单通道功率,提升探测距离,可以选择只使用中间能量较高的部分。故使相邻线激光有部分重叠,可以进一步提高单通道功率,提升探测距离。进一步地,如图7所示,线阵探测器9未利用到的区域可以粘贴不透光的黑色狭缝,遮挡背景光,降低环境干扰,提高信噪比。
本实施例的另一些实现中,在线阵探测器9处,多个发射激光器7对应线阵探测器9不同位置的分布如图10所示,一个发射激光器7对应k个探测器通道(k≥2);竖直方向顺序排列,水平方向排列周期为m(m≥2),提高水平分辨率,增加单次探测点数量。激光器自身能力分布特性如图9所示的能量随角度分布,故使相邻线激光可以有部分重叠,可以进一步提高单通道功率,提升探测距离。进一步地,如图11所示,未利用到的探测器区域粘贴不透光的黑色狭缝,遮挡背景光,降低环境干扰,提高信噪比。
本实施例的一些实现中,为了避免不同发射激光器7和线阵探测器9的传感单元之间的相互干扰,本实施例的各发射激光器7和线阵探测器9可以采用分时工作的方法,避免脉冲信号的串扰。
如图7所示的线激光排布为例,如图12所示的横轴为时间,S
在S
以此类推,直至第n个发射激光器完成脉冲发射S
至此为一个完整的工作周期,可以重新令第一个发射激光器发射脉冲信号,如此循环工作,即可实现所有线阵探测器的距离探测。
最后应说明的是,以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 一种线阵探测器扫描激光雷达
- 一种基于面阵探测器的三维扫描激光雷达